Ab in die Wüste: Rover SherpaTT und Coyote III absolvieren "Weltraummission" in Utah
24. Oktober 2016
Ab in die Wüste: Rover SherpaTT und Coyote III absolvieren "Weltraummission" in Utah
Das Testgelände im US-Bundesstaat Utah
An eine Marslandschaft erinnert das Gelände, in dem die Feldtestkampagne des Projekts Field Trials Utah stattfindet. Das Testareal hierfür befindet sich unweit der Kleinstadt Hanksville im Süden des US-Bundesstaates Utah.
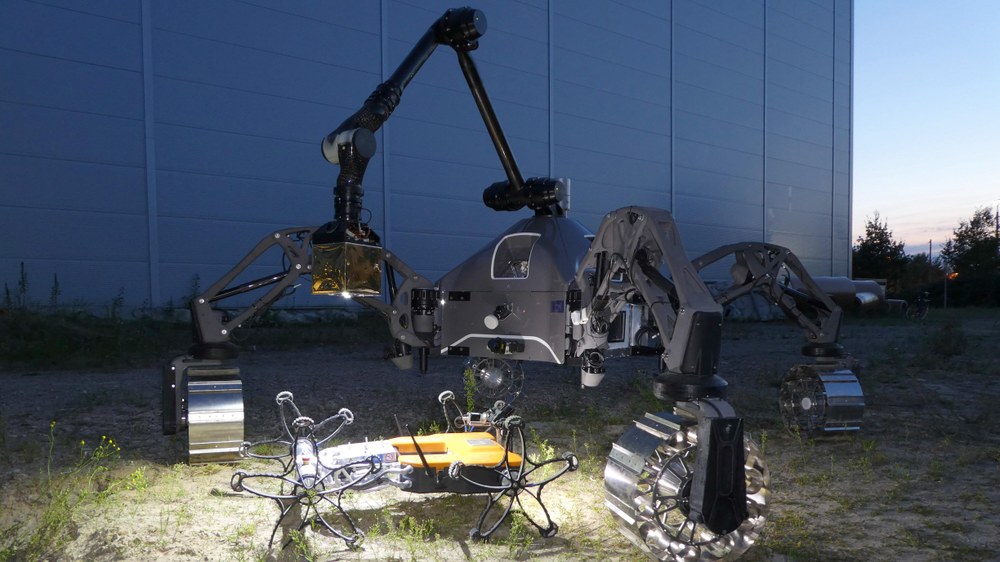
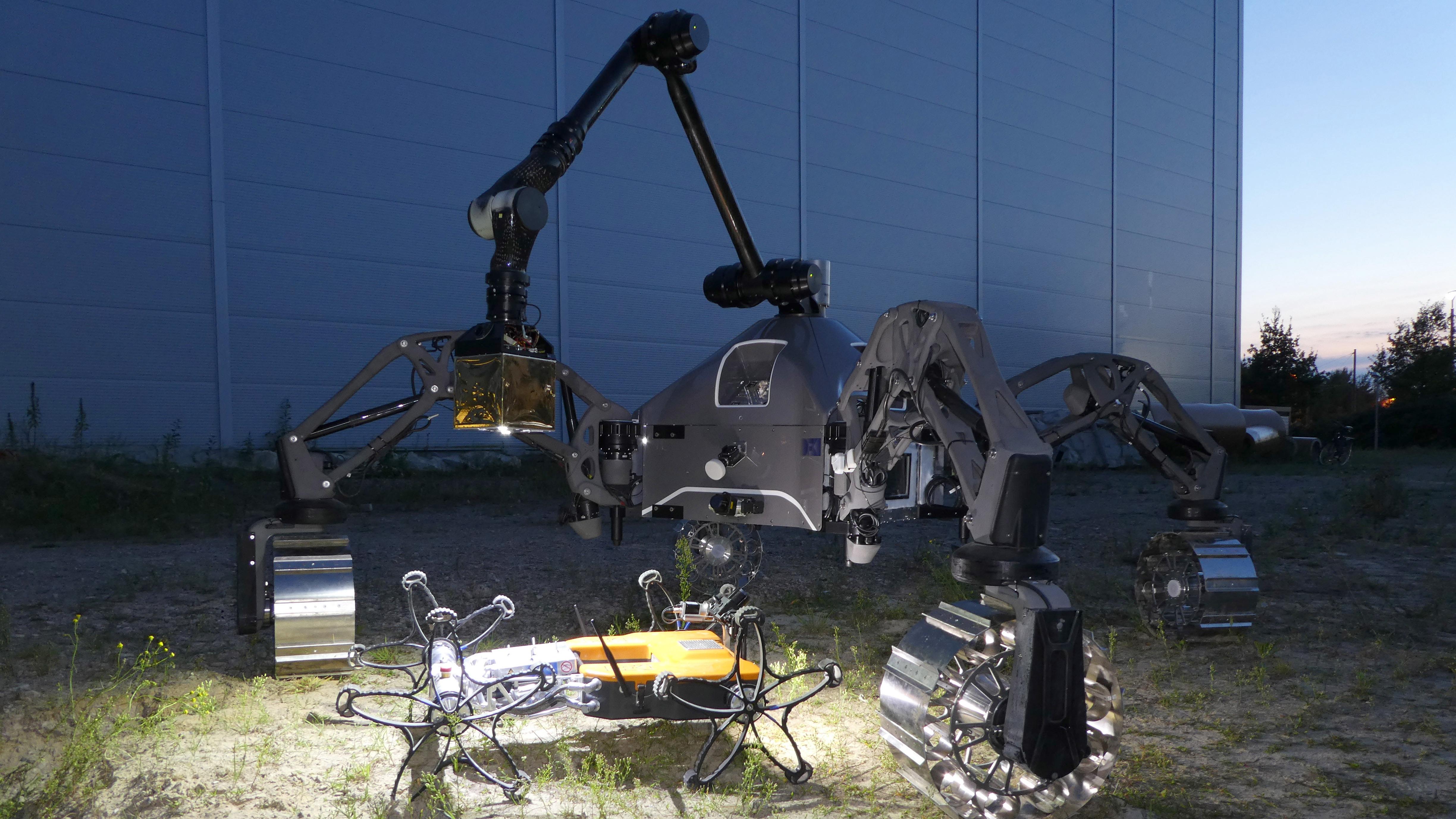
Ein ungleiches Paar: die Rover SherpaTT und Coyote III
Vom 24. Oktober bis zum 18. November 2016 werden die beiden Rover des Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) in der Feldtestkampagne des Projekts Field Trials Utah das Szenario einer "Weltraummission" absolvieren. Wie bei einer realen Mission sollen sie dort Bodenproben entnehmen und diese zu einer "Landestation" transportieren. Zudem wird die Technik der beiden Roboter SherpaTT und Coyote III dabei außerhalb der üblichen Laborbedingungen getestet.
Auffällig am Mikro-Rover Coyote III sind seine sternförmigen Räder. Diese ermöglichen es ihm, sich in allen möglichen Geländearten zügig vorwärts zu bewegen. Bis zu 15 Kilogramm Nutzlast kann der Roboter dabei zusätzlich aufnehmen und transportieren.
Projekt "Field Trials Utah" testet kooperierendes Robotersystem in marsähnlichem Gelände
Eine vierwöchige "Weltraummission" in der Halbwüste Utahs: Dieser Feldtestkampagne des Projekts Field Trials Utah (FT-Utah) stellen sich ab dem 24. Oktober 2016 die Rover SherpaTT und Coyote III. In dem unwegsamen, marsähnlichen Testareal unweit der Kleinstadt Hanksville im Süden des US-Bundesstaates müssen sie nicht nur Dauer- und Belastungstests über sich ergehen lassen - sie sollen auch ein künstliches Missionsszenario erfolgreich absolvieren. Die beiden Roboter arbeiten dabei im Team: Während der Schreit-Fahrrover SherpaTT die Umgebung erkundet und Proben entnimmt, ist der Mikro-Rover Coyote III für den sicheren Rücktransport des Probenmaterials zuständig. Das Projekt des Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) und der Universität Bremen wird vom Raumfahrtmanagement des Deutschen Zentrums für Luft- und Raumfahrt (DLR) gefördert.
SherpaTT und Coyote III: ein ungleiches Paar löst eine gemeinsame Aufgabe
Den Test führen Wissenschaftler des DFKI durch, an dem beide Rover entwickelt, gebaut, und mit zahlreichen Funktionen versehen wurden: SherpaTT kann sich mit seinen vier langen Beinen, die mit Rädern ausgestattet sind, mühelos in schwierigem Gelände bewegen. Ein Kniegelenk ermöglicht sogar einen dreidimensionalen Einsatz des Fahrwerks. Verschiedene Sensoren lassen ihn seine Umwelt detailliert wahrnehmen - dank dieses Orientierungsvermögens kann er seine Umgebung autonom erkunden. Zudem besitzt SherpaTT einen Roboterarm, den er mit Hilfe von Kamera und Laserscanner punktgenau einsetzen und mit dem er beispielsweise Materialproben entnehmen und mitgeführte Werkzeuge bedienen kann.
Sein "kleiner Bruder", Mikro-Rover Coyote III, ist mit einer Geschwindigkeit von rund fünf Stundenkilometern in unwegsamem Terrain etwa doppelt so schnell unterwegs wie SherpaTT. Diese Geländegängigkeit verdankt er seinen speziellen Sternrädern, die sich gut an die unterschiedlichsten Bodenverhältnisse anpassen können. Mit nur rund zwölf Kilogramm Gewicht ist er allerdings auch deutlich leichter als der etwa 150 Kilogramm schwere SherpaTT. Möglich wird dies neben seiner geringen Größe auch durch seine Leichtbauweise aus Materialien wie Karbon und Aluminium.
Missionskontrolle via Exoskelett
Über ein Kommunikationssystem können beide Roboter zusammenarbeiten und so ihre "Mission" erfolgreich meistern: Wie bei einem realen Explorationsszenario gilt es, zunächst das Terrain auszukundschaften und dann Bodenproben zu entnehmen. Diese Aufgaben übernimmt der Schreit-Fahrrover SherpaTT. Die Proben übergibt er anschließend an Coyote III, der sie zu einer vorher festgelegten "Landestation" transportiert - bei einer Marsmission wäre dies die Raumsonde, welche die Proben nach Ende der Mission zur Erde zurückbringen würde. An einer Basisstation können die beiden Rover ihre Batterien aufladen. Sie dient zudem dazu, Daten an die "Bodenstation" zu übertragen. Die Aufgabe der Bodenstation übernimmt in diesem Szenario die Kontrollstation am DFKI in Bremen: Von dort aus wird der gesamte Ablauf der Kampagne überwacht. Mit Hilfe eines Oberkörper-Exoskeletts kann ein Wissenschaftler die Roboter bei Bedarf via Satellitenverbindung steuern.
"Teamfähigkeit" ist auch bei Robotern gefragt
Beide Roboter sind Teil des Projekts TransTerrA. In dem Projekt werden autonome Roboter-Systeme entwickelt, die in der Lage sind, ferne Planetenoberflächen zu erkunden und dabei in Teams zusammenzuarbeiten. Ein wichtiges Ziel dabei ist es, die Technologien, die hierfür entwickelt werden, auch auf der Erde einsetzen zu können: etwa für den Einsatz von Rovern bei Unterwasser-Einsätzen, bei Such- und Rettungsdiensten oder für die Entwicklung von Robotern im Bereich der Rehabilitationsmedizin, wie etwa Exoskelett-Systemen.
Normalerweise dauert es viele Jahre, bis neue Planeten-Rover und Missionsszenarien tatsächlich im Weltraum zum Einsatz kommen. Um nachzuweisen, dass die Roboter auch widrigen Bedingungen außerhalb des Labors standhalten und auf Mond oder Mars ebenso ihre Arbeit verrichten können, sind Tests unter möglichst realen Missionsbedingungen ein wichtiger Schritt. In Kooperation mit der kanadischen Raumfahrtagentur CSA haben das DFKI und die Universität Bremen daher ein Konzept entwickelt, um die ursprünglich für das Labor geplanten Versuche in eine realistischere Umgebung, eine Marsumgebung, zu bringen. Dieses Konzept mündet in der Feldtestkampagne "FT Utah". Die Testergebnisse sollen zeigen, ob die Roboter-Technologie bereits hinreichend ausgereift ist und wertvolle Ergebnisse für die weitere Entwicklung liefern.
Federführend für das Projekt "FT-Utah" ist das DFKI mit der Universität Bremen als Verbundpartner. Das DFKI ist auch Verantwortlich für die Durchführung des Projekts "TransTerrA" und zuständig für Entwicklung und Bau der Rover. Die Förderung beider Projekte erfolgt durch das DLR Raumfahrtmanagement mit Mitteln des Bundesministeriums für Wirtschaft und Energie (BMWi).



{kind=link}
{kind=link}
{kind=link}