
RAX Design
The RAX instrument is a particularly small and lightweight Raman spectrometer based on a 532 nm CW laser, grating spectrometer and a CMOS sensor.

The instrument must endure the extreme diurnal environment of Phobos, such as
extreme temperature variation (-55 to +70 ℃ for storage and -40 to +5 ℃ for operation),
rapid diurnal cycles,
dust (potentially contaminating optics and actuator mechanism),
vacuum (complicating the heat distribution within the instrument),
radiation (potentially deteriorating the transmission of optics and electronics).
and furthermore must fit in the low-mass rover.
The RAX instrument consists of two physically separated units: the RAX laser assembly (RLA) and the RAX spectrometer module (RSM). The autofocusing subsystem (AFS), dedicated to focusing the laser on the surface of Phobos, is accommodated within the RSM. The entire RAX instrument has a volume of approximately 81 × 125 × 98mm³ and a mass of approximately 1.4 kg. The Institute of Optical Sensor Systems at DLR has developed the RSM. The University of Tokyo, JAXA, and Rikkyo University, Japan are responsible for the development of AFS. The Instituto Nacional de Técnica Aeroespacial (INTA) and the University of Valladolid, Spain, who developed and built the RLS laser unit for the ExoMars 2022 mission, provided the RLA.
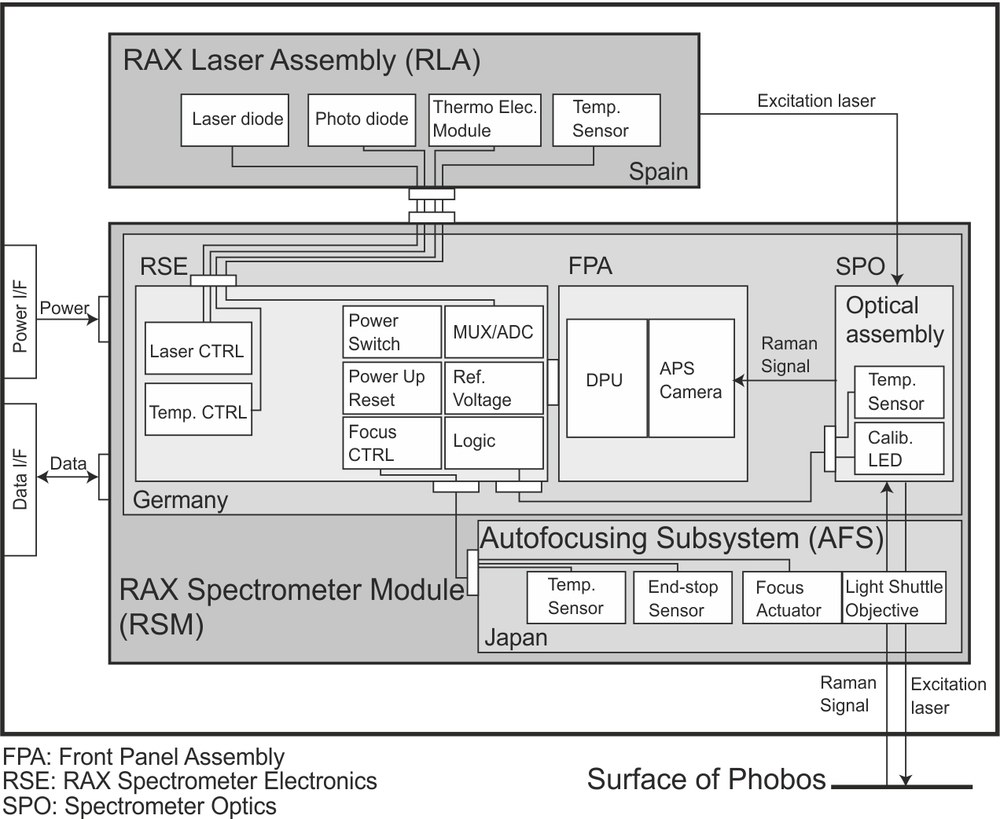
The RLA is a compact laser module that emits a 532 nm CW laser beam at a variable power of up to 35 mW. It is essentially a flight spare of the laser unit developed for the ExoMars2022 mission. The RLA provides laser light to the RSM through an optical fiber. The collimated laser beam is focused onto the surface of Phobos through the AFS, which comprises an entrance light-shuttle objective lens (LSO) and an actuator mechanism. The scattered light is collected and collimated by the entrance objective and sent to the spectrometer module. A series of optics, such as a dichroic mirror, collimator lenses, slit, transmission grating, Raman edge filter, and camera objective lenses are mounted inside the RSM. The image from the slit is acquired using the 3D-plus CMOS sensor. The 2D image is integrated to form a 1D line spectrum. The electronic set up for controlling the laser and focus actuator is accommodated in the RSM. A focused laser beam is imperative to maximize the intensity of Raman signals emerging from the target surface below the rover, without damaging a possible heat-sensitive sample by laser irradiation. The laser spot diameter on the sample is designed to be 50 µm to ensure a high Raman signal and no damage to the sample. The distance between the lowest tip of the LSO and the laser focus is 78 mm. By design, the stroke of the LSO and its resolution are longer than 13 mm and finer than <50 µm, respectively, Autonomous focusing involves a two-step procedure. In the first step, the reflectance spectra of surface materials, illuminated by the LED placed near the entrance aperture, are captured by focusing on the sample surface, using the rover legs and AFS actuator. The second step is fine focusing using the laser and only the AFS actuator, to maximize the signal-to-noise-ratio (SNR) of the potential Raman signals. Furthermore, the backscattered laser light is measured by the RLA autofocus photodiode for accurate focus distance determination.
Contact
Dr. rer. nat. Susanne Schröder