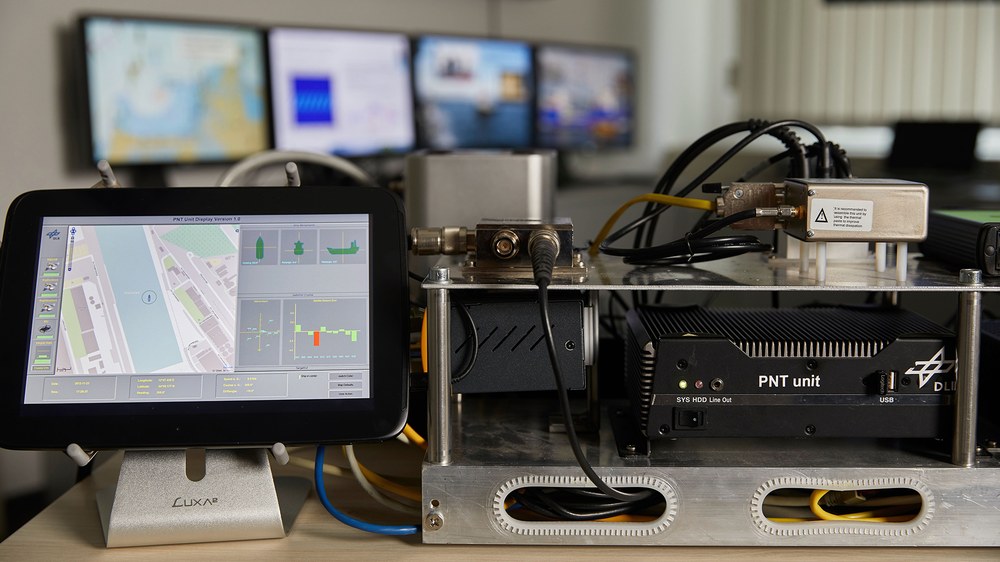
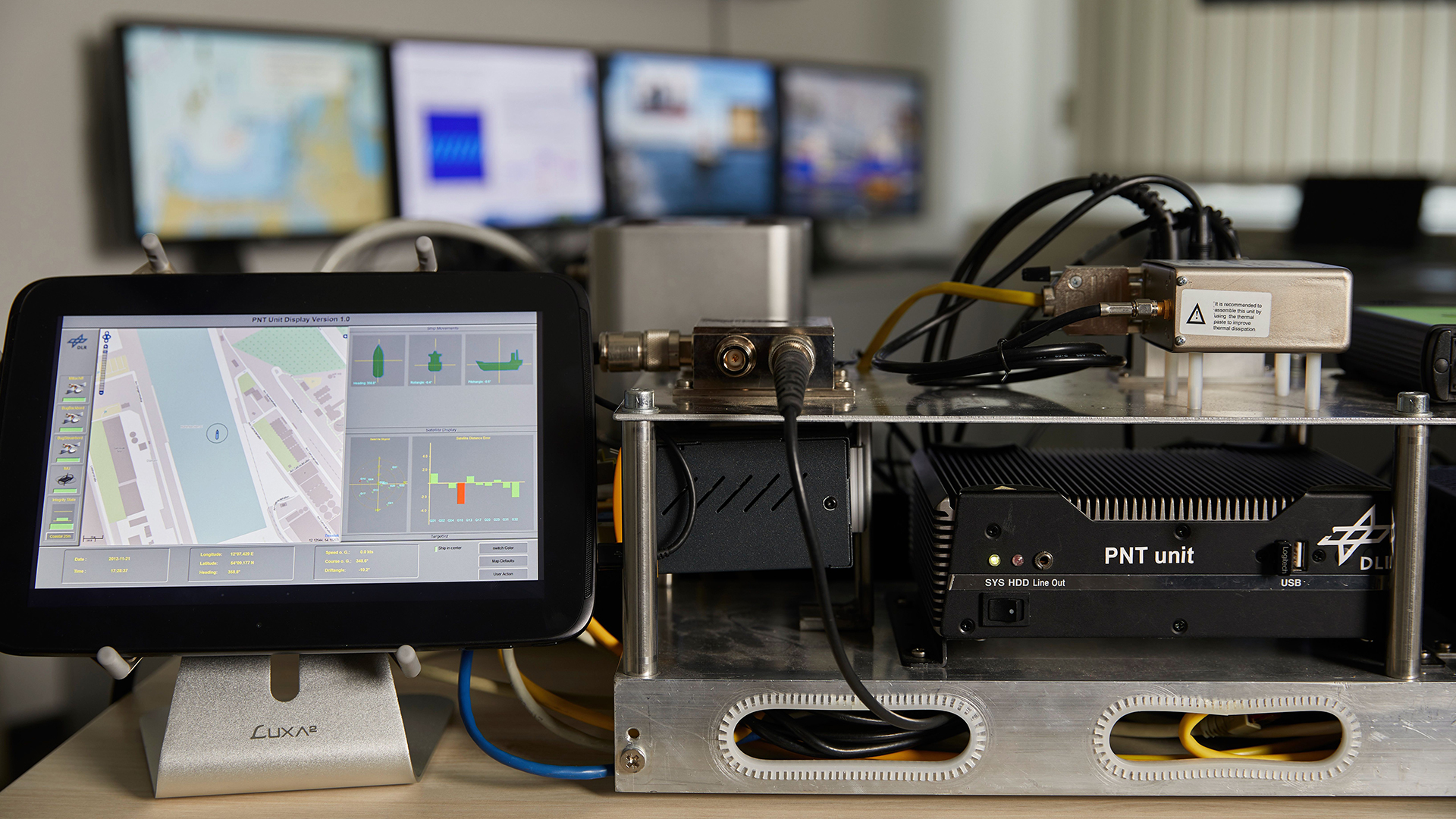
Research and development activities of the Multi Sensor Systems group focus on methods which enable resilient provision of Position, Navigation and Time (PNT) information onboard a vessel. Here the navigation information includes the velocity (speed over ground / through water, course over ground) as well as three-dimensional vessel attitude (roll, pitch, heading). The developments are based on the Maritime PNT System concept. Here an onboard data processing unit (PNT Unit), which uses multi-sensor fusion techniques, will be responsible for the onboard PNT provision within a future Integrated Navigation System (INS).
The objective is to provide a complete and reliable source of PNT data though a combined use of all onboard sensors such as GNSS receiver (multi-frequency, multi-constellation), speed log, gyrocompass, echo sounder as well as inertial sensors together with ground based augmentation services (GBAS) as well as alternative positioning systems (R-Mode, e-Loran etc.). Furthermore, integrity information for all PNT parameter based on accuracy estimation within the sensor fusion methods shall be provided to the user. One of the actual research topics of the group is the question, how to achieve such accuracy estimates by means of determining an upper error bound, under consideration of a remaining integrity risk for various sensors and sensor combinations.
The use of Global Navigation Satellite Systems (GNSS), both available GPS (USA) and GLONASS (Russia) as those which are currently developed Galileo (Europe) and BeiDou (China) is currently and will continue to be a main source for delivering the shipboard PNT data. Therefore, the development of algorithms and methods for GNSS-based determination of the position, speed and attitude (orientation) taking advantage of new possibilities such as multiple frequencies and multiple constellations is one focus of research activities. Here a special attention is laid on the development of specially optimized integrity algorithms such as Receiver Autonomous Integrity Monitoring (RAIM) and their performance evaluation for maritime applications. In cooperation with the group Maritime Services the group develops methods for the onboard application and validation of new GNSS augmentation services .In the field of sensor fusion the work of the group is concentrated on the development of reliable Recursive Bayesian Estimation methods, which combine GNSS and other onboard sensors in order to meet the requirements of safety critical applications. The use of so-called tightly coupled approaches makes it possible to detect faulty satellite signals within the filter and to eliminate them from the final navigation solution.
Im Bereich der Sensorfusion werden zuverlässige rekursive Bayessche Filter entwickelt, welche GNSS und weitere schiffseitige Sensoren nutzen, um die Anforderungen für sicherheitskritische Anwendungen erfüllen zu können. Die Nutzung sogenannter eng gekoppelter (engl. tightly coupled) Filter ermöglicht es, innerhalb des Filters fehlerbehaftete Satellitensignale zu detektieren und von der Positionslösung auszuschließen.
Onboard PNT determination using multi-sensor methods
Development of error models for onboard sensors
Development of robust Bayesian filters for multisensor-based PNT determination
Development of multisensor-based integrity monitoring methods using Bayesian filtering
Further development on PNT-Unit V1
GNSS-based onboard PNT determination
Development of multi-constellation and multi-frequency methods for position and velocity determination
Development of GNSS compass methods for accurate attitude determination (roll, pitch, heading)
Development of Receiver Autonomous Integrity Monitoring (RAIM, ARAIM) algorithm for maritime applications
Development of methods for position and velocity estimation using augmentation services
Real Time (RT) framework
Provision of a common software framework for the development and validation of multi-sensor-based methods in real time
Platform for integration and evaluation of new sensors
Provision of interface for end users and visualization software
Schiffsfahrt in Formation
Für eine Messkampagne des DLR-Instituts für Kommunikation und Navigation waren zwei Schiffe im Einsatz: Die "Neuwerk" des Wasser- und Schifffahrtsamts Cuxhaven sowie die "Hermann Marwede" der Deutschen Gesellschaft zur Rettung Schiffsbrüchiger. Die Wissenschaftler sendeten und empfangen von den Schiffen Signale im Breitbandbereich und untersuchten dabei die Einflüsse unter anderem von Wellen und Schiffskörpern auf die Übertragung.
Deutschlands lichtstärkster Leuchtturm wird zum Standort für die Signalübertragung zwischen Schiff und Land. Hoch über Helgoland installieren die DLR-Wissenschaftler ihre Antennen.
Routenbesprechung für die Messkampagne vor Helgoland
Für eine Messkampagne mit zwei Schiffen in der Nordsee hatten die Wissenschaftler des Deutschen Zentrums für Luft- und Raumfahrt (DLR) verschiedene Szenarien entworfen, die zwei Schiffen bei hohem Wellengang vor Helgoland abfahren sollten. Dabei wurde der Übertragungskanal im Breitbandbereich untersucht.







{kind=link}
{kind=link}
{kind=link}
{kind=link}