
The Reusability Flight Experiment (ReFEx)


The Reusability Flight Experiment (ReFEx) is a technology demonstrator developed by the German Aerospace Center (DLR) with the aim to research and develop key technologies for aerodynamically controlled first stages of reusable launch vehicles. The key technologies developed in the ReFEx experiment include the aerodynamic design and the Guidance, Navigation and Control (GNC) system of the vehicle.
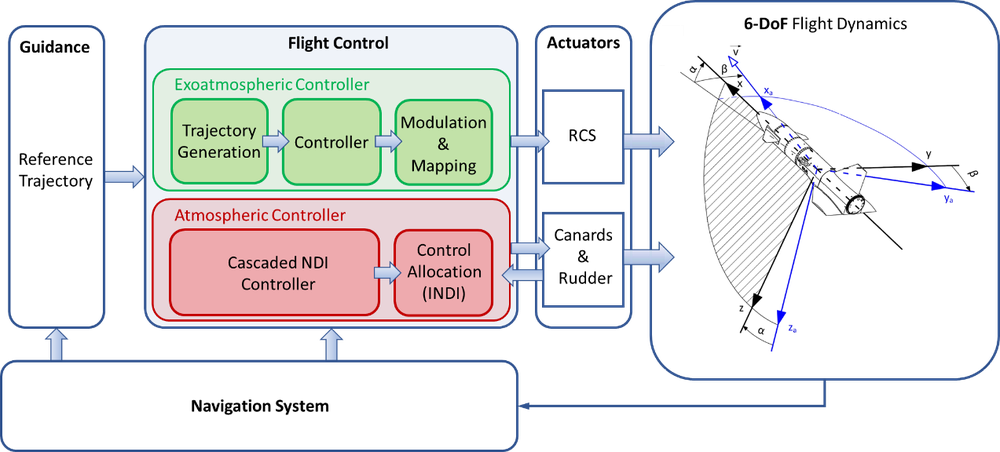
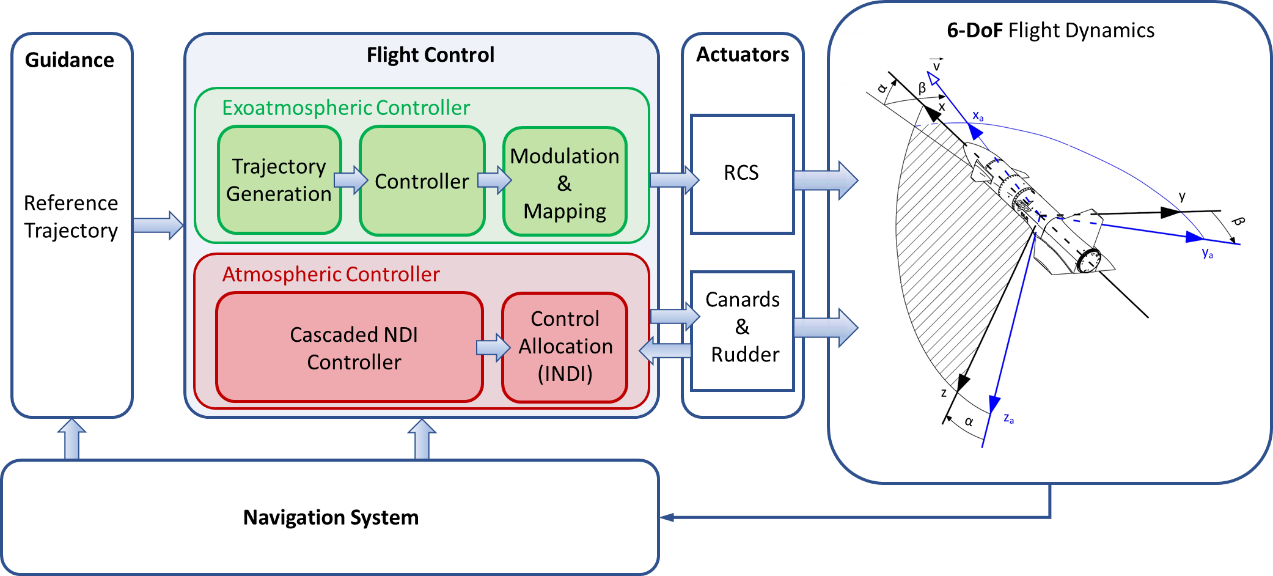
The ReFEx vehicle has a length of 2.7 m, a wingspan of approximately 1.1 m and a mass of around 375 kg. It is not equipped with an engine and is therefore launched by a VSB-30 sounding rocket which carries the experiment to an apogee altitude of approximately 130 km. Thereby a state similar to the first stage separation in conventional space transportation systems is achieved. ReFEx will then perform a return flight along a trajectory comparable to a returning winged first stage of a reusable launch vehicle. This trajectory can be divided into two phases - an exoatmospheric flight phase directly after separation from the sounding rocket and an atmospheric flight phase. Outside the atmosphere, ReFEx is controlled by the cold gas thrusters of a reaction control system (RCS), whereby several maneuvers are performed to calibrate the sensors and navigation system and to reorient the vehicle’s attitude for atmospheric reentry. During atmospheric flight, the ReFEx vehicle is controlled by aerodynamic control surfaces including two canards and a rudder. Within this phase, particularly challenging flight mechanics conditions arise, which include a wide range of velocities and angles of attack, ranging from hypersonic to subsonic flight conditions, and areas in which control reversal occurs.
The Institute of System Dynamics and Control (SR) is responsible for the development and validation of a robust flight controller to ensure that ReFEx follows its trajectory and compensates for all relevant external disturbances that occur during flight. Consequently, a separate controller is being developed for each flight phase. The cold gas thrusters of the RCS are controlled using partial feedback linearization and pulse width-pulse frequency modulation. The controller in the atmospheric phase is based on a cascaded control approach and the incremental non-linear dynamic inversion (INDI) method.
{kind=link}
{kind=link}
References: