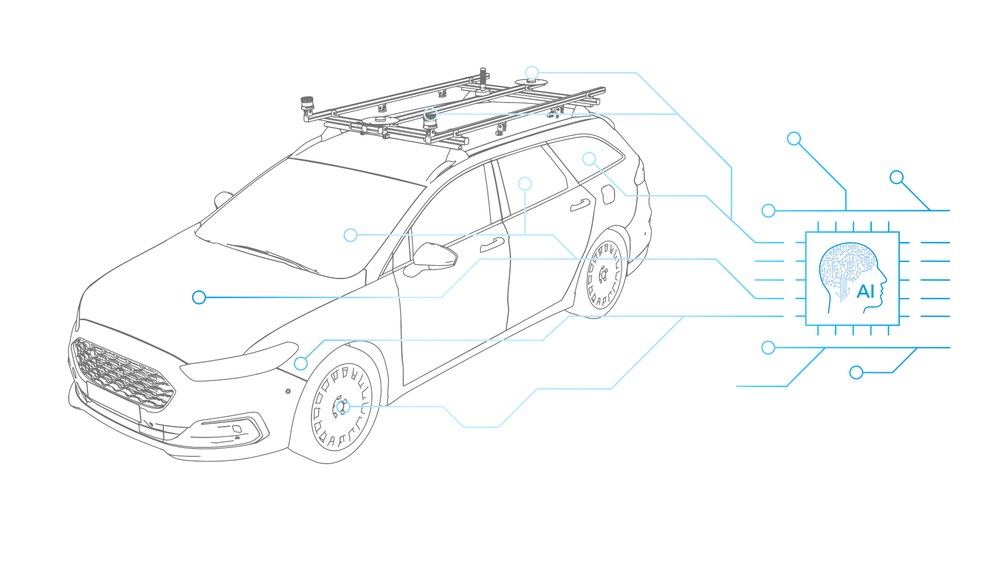
“AI For Mobility” (AFM) is a new testing platform to investigate and implement novel control methods based on Artificial Intelligence (AI) within the department of vehicle system dynamics at DLR. This project was launched with the aim of modifying and equipping a production vehicle so it can be used as a test platform for new types of control system functions. In order to enable automated operation, a drive-by-wire kit was fitted into the vehicle. It allows to drive defined and reproducible maneuvers and thus to systematically analyze the implemented AI-based control algorithms. Besides that, the AFM takes advantage of semi-active suspension technology, making it a suitable test platform for vertical dynamics control applications. Another area of research is the interpretation of the surrounding scenery of the car for vehicle dynamics control purposes. With the help of different perception sensors and advanced machine learning methods, the driving environment is processed and recorded in real-time. This information will in turn be integrated into chassis control and system state estimation algorithms.
The vehicle is equipped with a variety of sensors to measure the states and internal values as well as environmental quantities as, e.g., the road condition and the surrounding scenery. The vehicle sensors are synchronously logged on a rapid control prototyping system. For certain research projects the collected data is uploaded to a cloud computer allowing centralized and cross-vehicle control methods. The extensive measurement equipment transforms the vehicle into a powerful data collector enabling the development of novel state estimation methods. For preliminary simulative analysis, a high-fidelity vehicle model is required. For this purpose, a multi-domain multi-body-system (MBS) vehicle model is implemented in Modelica.
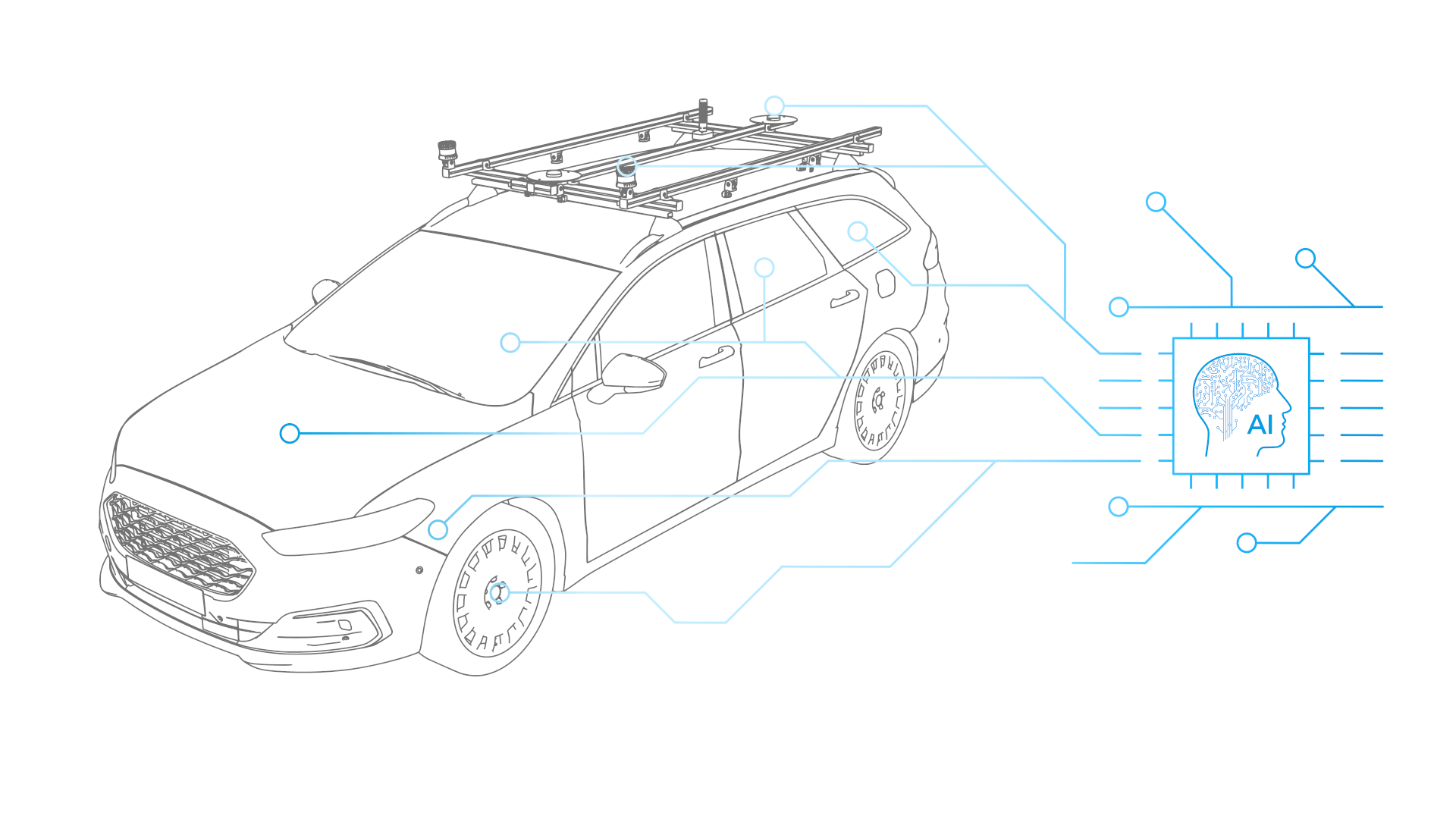
Components in the AFM
The AFM is equipped with the following sensors as well as powerful CPU and GPU systems:
Complete drive-by-wire kit (DBW)
The drive-by-wire (DBW) kit enables steering, acceleration and braking to be controlled in real time, allowing the vehicle to be driven automatically. The system is seamlessly integrated into the vehicle electronics and communication network and enables control of all series actuators.
Powerful Rapid Control Prototyping (RCP) system
The RCP system is a powerful platform that is optimised for use in the vehicle. The system offers numerous interfaces for information transfer, e.g. several CAN and Ethernet connections as well as a multi-I/O card for generating and measuring analogue and digital signals. All control algorithms used to control the DBW kit run on this system. The central data logging with cloud connection also takes place here.
Multi GPU supported AI computing platform
The seven perimeter cameras and the two lidar sensors are connected to the powerful AI computing platform (GPU-based) to process their outputs (3D stereo, lane/sign/object recognition,...) and to record the data.
State-of-the-art surroundings camera system
A total of seven high-resolution cameras (GMSL - RCCB) are mounted on the roof rack, which record the 360° environment fully synchronised in full resolution.
High-resolution lidar sensors
Two 360° lidar sensors are mounted on the roof rack at the front of the vehicle to scan the surroundings and correlate the information with other sensors, e.g. the cameras or the radar.
Radar sensor system
Up to three radar sensors are integrated into the front of the vehicle, relaying the radar signatures to the AI computing platform where seamless object detection and tracking is performed.
Customised semi-active damper control system
The controlled semi-active dampers regulate the forces that influence the bodywork and wheel load fluctuations.
Non-contact road weather sensor
The high-precision optical sensor continuously scans the road surface and records various parameters such as the surface temperature or the height of the water film.
High-precision IMU/GNSS system
A high-precision 6D inertial measurement unit (IMU) is installed near the centre of gravity to record all aspects of the vehicle's movement. Two roof antennas enable the combined use of the global navigation satellite system (GNSS).
Real-time measurement of drive torque and steering force via strain gauges
A calibrated system of strain gauges is installed on the drive shafts and track rods. This allows drive torques and tie rod forces to be measured during driving manoeuvres.
Optical speed sensor
The optical sensor scans the road surface to measure the speed of the vehicle relative to the carriageway. Both the longitudinal and lateral speed can be precisely determined. These measurements are used to calculate the vehicle's slip angle.
Mobile internet access (4G)
The vehicle network can be accessed via an LTE connection to change control parameters during operation and to monitor test drives remotely. Real-time data upload and connection to cloud-based applications are also possible.
Mobile base station for dGPS reception
To increase the accuracy of GPS measurements, a mobile differential GPS (dGPS) base station provides correction data to the IMU/GNSS platform located in the vehicle.
Intelligent power supply system (PDS)
The PDS manages the power supply for all additional electrical components in the vehicle. Due to the large number of sensors and actuators installed, their power supply must be intelligently controlled.
The PDS manages the power supply for all additional electrical components in the vehicle. Due to the large number of sensors and actuators installed, their power supply must be intelligently controlled.
Within the AI For Mobility project a hybrid production car was chosen as basic platform, because of its full by-wire vehicle architecture. Since most prototype vehicles have the drawback of not having a road approval, they can only be used on closed-off test areas. The AFM has a special road approval for certain operation modes and thus has a larger range of possible use cases in experiments also on the public road network.






{kind=link}