To ensure the competitiveness of the European space industry, it is essential to reduce the costs of transporting payloads into space. A key factor in achieving this is the reusability of rocket stages, a challenge being addressed by the German-Japanese-French project CALLISTO (Cooperative Action Leading to Launcher Innovation in Stage Toss-back Operations). The goal of the CALLISTO reusable demonstrator is to advance knowledge in the vertical take-off and vertical landing of rocket stages (VTVL), and, like many space projects, it is named after figures from ancient Greek mythology. CALLISTO will develop and demonstrate the technologies needed for a reusable rocket stage.
The demonstrator stands 13 metres high and is equipped with control surfaces and fold-out landing gear. It is powered by a single rocket stage that uses a mixture of liquid oxygen (LOX) and liquid hydrogen (LH2) as propellant. The launch procedures for CALLISTO are fully automated, covering ignition, injection into the predefined flight path, engine shutdown and deployment of the aerodynamic flight control system (fins). For the flight phase, DLR and JAXA are developing algorithms to optimise the spacecraft's trajectory in real time.
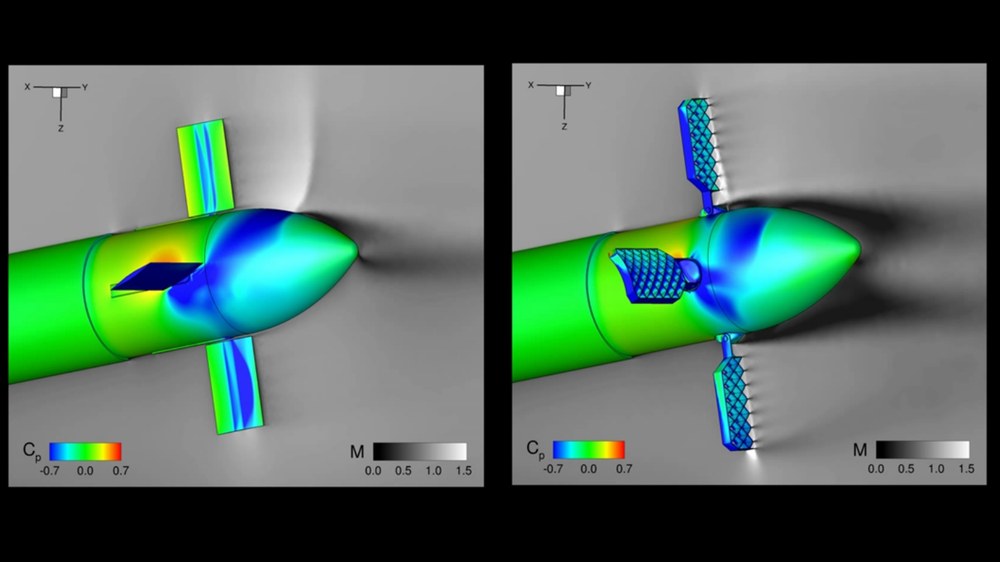
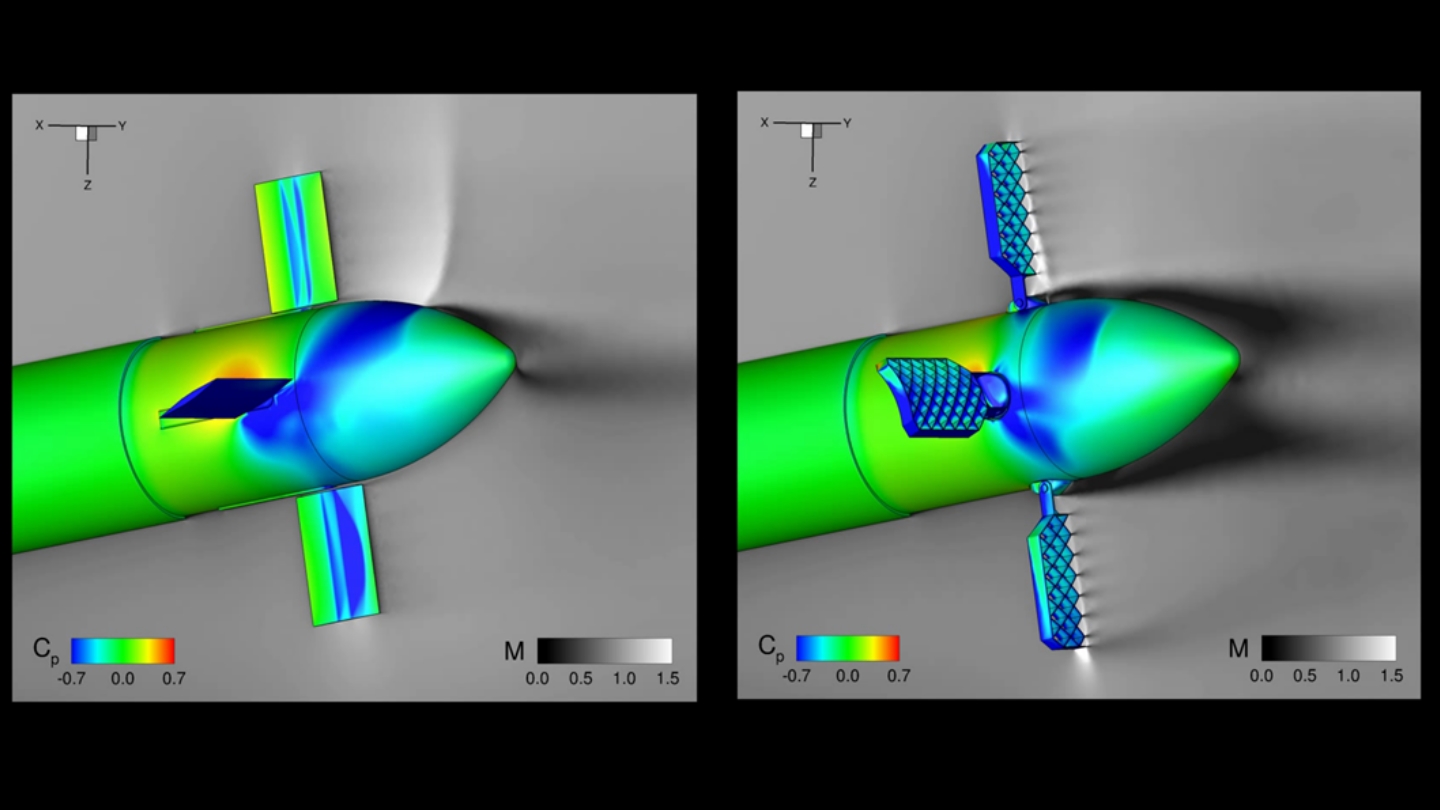
With CALLISTO, DLR engineers, in collaboration with the French space agency CNES and the Japanese space agency JAXA, are designing a demonstrator that can launch vertically and then land in the same alignment (this is referred to as vertical take-off, vertical landing (VTLT)). CALLISTO is guided using aerodynamic control surfaces during a non-powered phase, featuring a transition from supersonic to subsonic flow conditions. The engine is then reignited to decelerate the CALLISTO Vehicle. The landing system therefore absorbs the residual kinetic energy, enabling CALLISTO to perform a safe and stable landing.
Video: CALLISTO
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Video: CALLISTO
With CALLISTO, DLR engineers, in collaboration with the French space agency CNES and the Japanese space agency JAXA, are designing a demonstrator that can launch vertically and then land in the same alignment (this is referred to as vertical take-off, vertical landing (VTLT)). CALLISTO is guided using aerodynamic control surfaces during a non-powered phase, featuring a transition from supersonic to subsonic flow conditions. The engine is then reignited to decelerate the CALLISTO Vehicle. The landing system therefore absorbs the residual kinetic energy, enabling CALLISTO to perform a safe and stable landing.
Why do we need a demonstrator when simulation methods are now so advanced? Testing under real-life conditions allows the experts involved in CALLISTO to ensure that the flight characteristics determined by computer models are accurate in practice. The interaction between theoretical models and physical testing ultimately provides a more reliable and comprehensive understanding of a given system, and data gathered from CALLISTO flight experiments will be used to further refine simulation tools, thereby enhancing the precision of their forecasting. Participants in the project also expect to gain valuable insights into the economic viability of reusable stages, as ground-based processes such as manufacturing, transport, maintenance between flights and the operation of control centres are being closely monitored and compared with projections. Overall, CALLISTO uses simulation and real-life testing of a demonstrator to verify, improve and optimise methods and models for reusable rocket stages.
Trilateral cooperation
CALLISTO is a joint project from DLR, the French space agency CNES and the Japanese space agency JAXA.
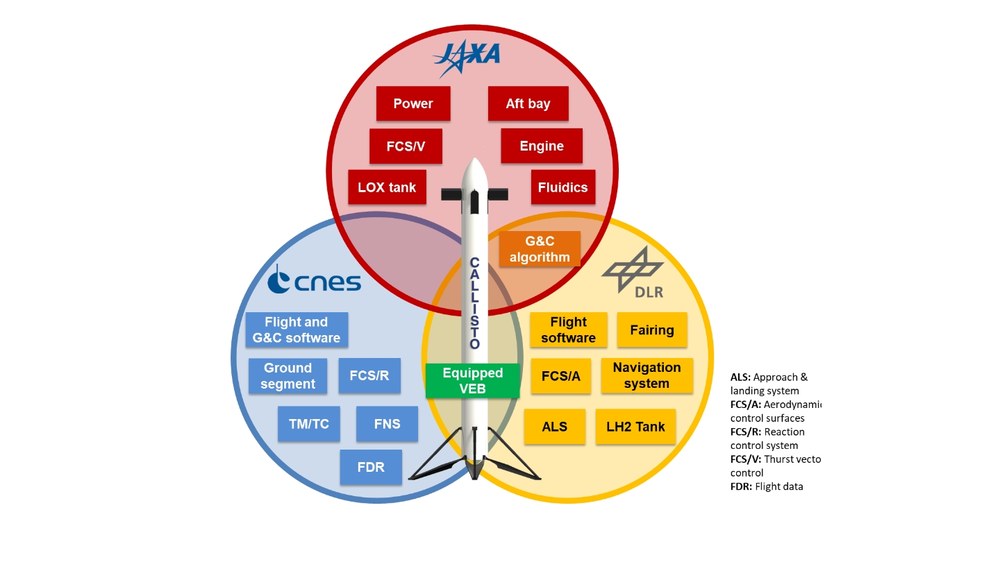
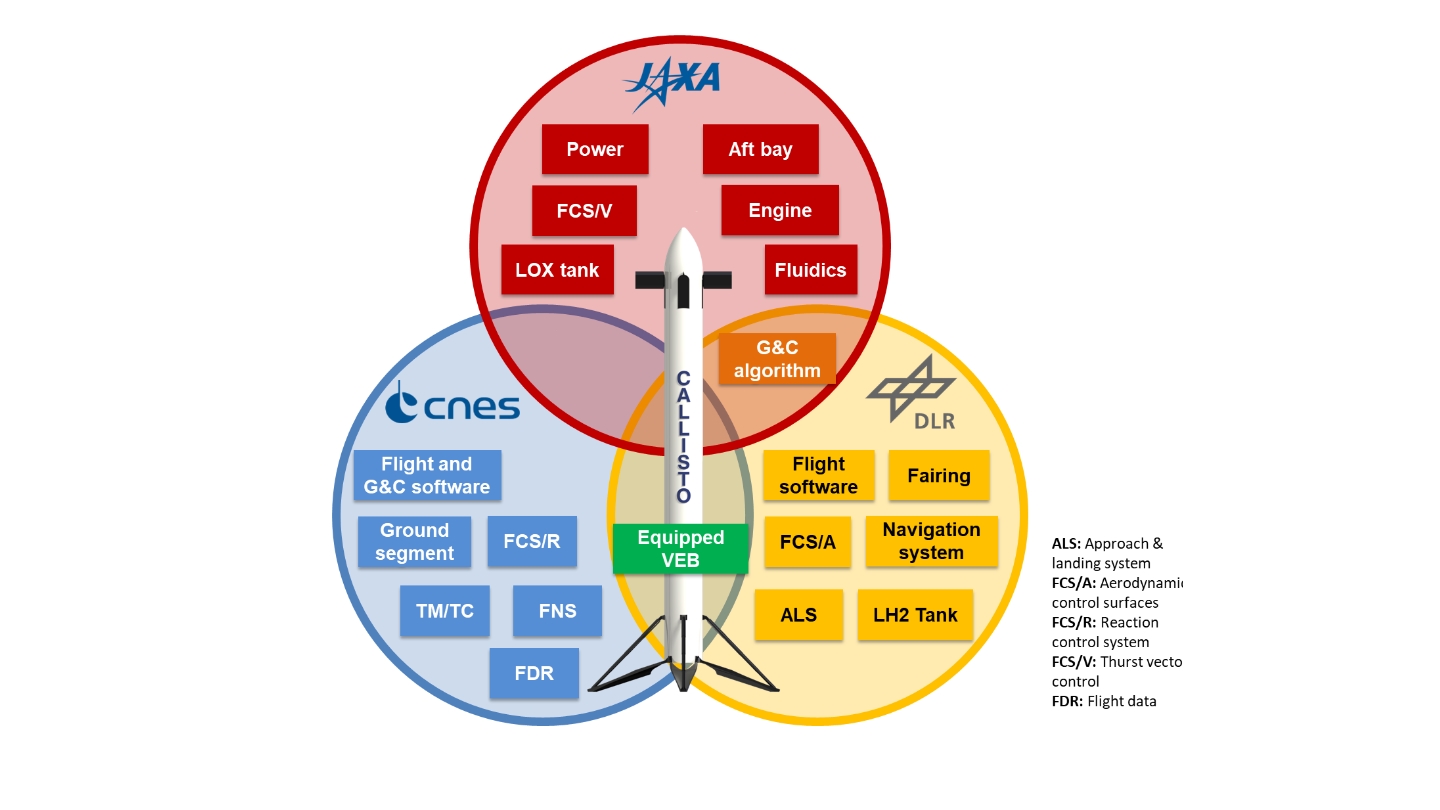
Sharing of tasks between the three CALLISTO project partners
DLR is responsible for the flight software, covering the rocket nose cone, the navigation system, the liquid hydrogen tank, the approach and landing system and the aerodynamic control. The French space agency CNES supplies the software for flight and guidance & control, the flight data recorder, the ground segment, the reaction control system and the flight data. The Japanese space agency JAXA is contributing the following subsystems: the aft cargo bay, the propulsion system, algorithms for steering and control, the liquid oxygen tank, the power supply and the thrust vector control.
What sets CALLISTO apart is its fully automated landing process. The engine reignites to reduce the descent speed, the landing legs deploy and the landing system absorbs the remaining kinetic energy, allowing the vehicle to land safely and steadily in an upright position.
In the animation, the landing sequence may appear unspectacular to the casual observer, but with a rapid descent and a thrust-to-weight ratio exceeding 1.3, such a touchdown is far from simple. It is akin to a driver travelling at over 250 kilometres per hour (CALLISTO descends at over 800 kilometres per hour), attempting to brake sharply just before entering a garage.
At least five different missions are planned with the same spacecraft, launching from the European Spaceport in Kourou, French Guiana. The complexity will increase with each test, and while initial flights will lift the spacecraft only a few metres off the ground, the final demonstration will reach altitudes of up to ten kilometres, testing manoeuvres applicable to an operational VTVL stage.
DLR participation in CALLISTO
CALLISTO is a joint project from DLR, the French space agency CNES and the Japanese space agency JAXA.




{kind=link}
{kind=link}
{kind=link}
{kind=link}