
Landing and Mobility Test Facility

{kind=link}
{kind=link}

{kind=link}
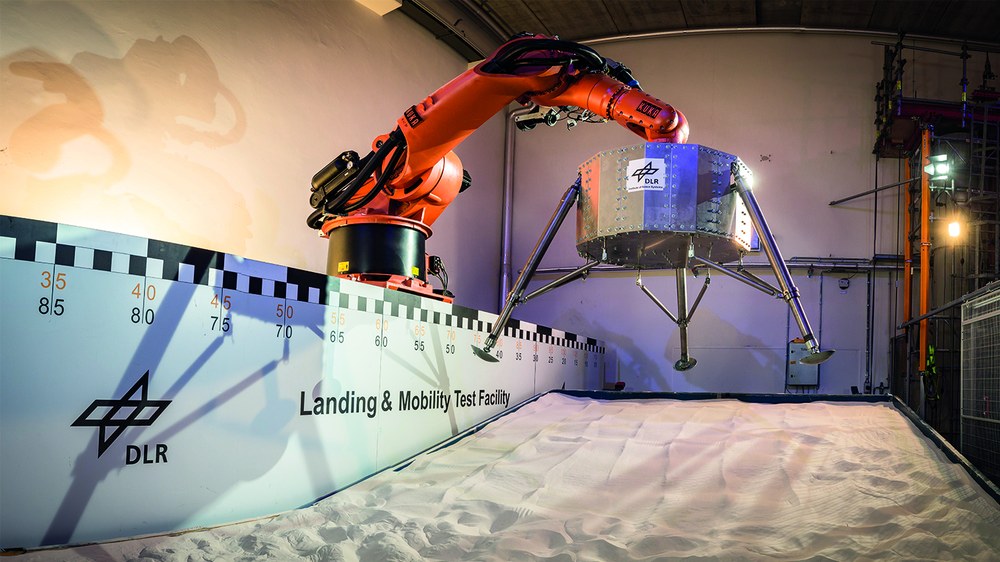
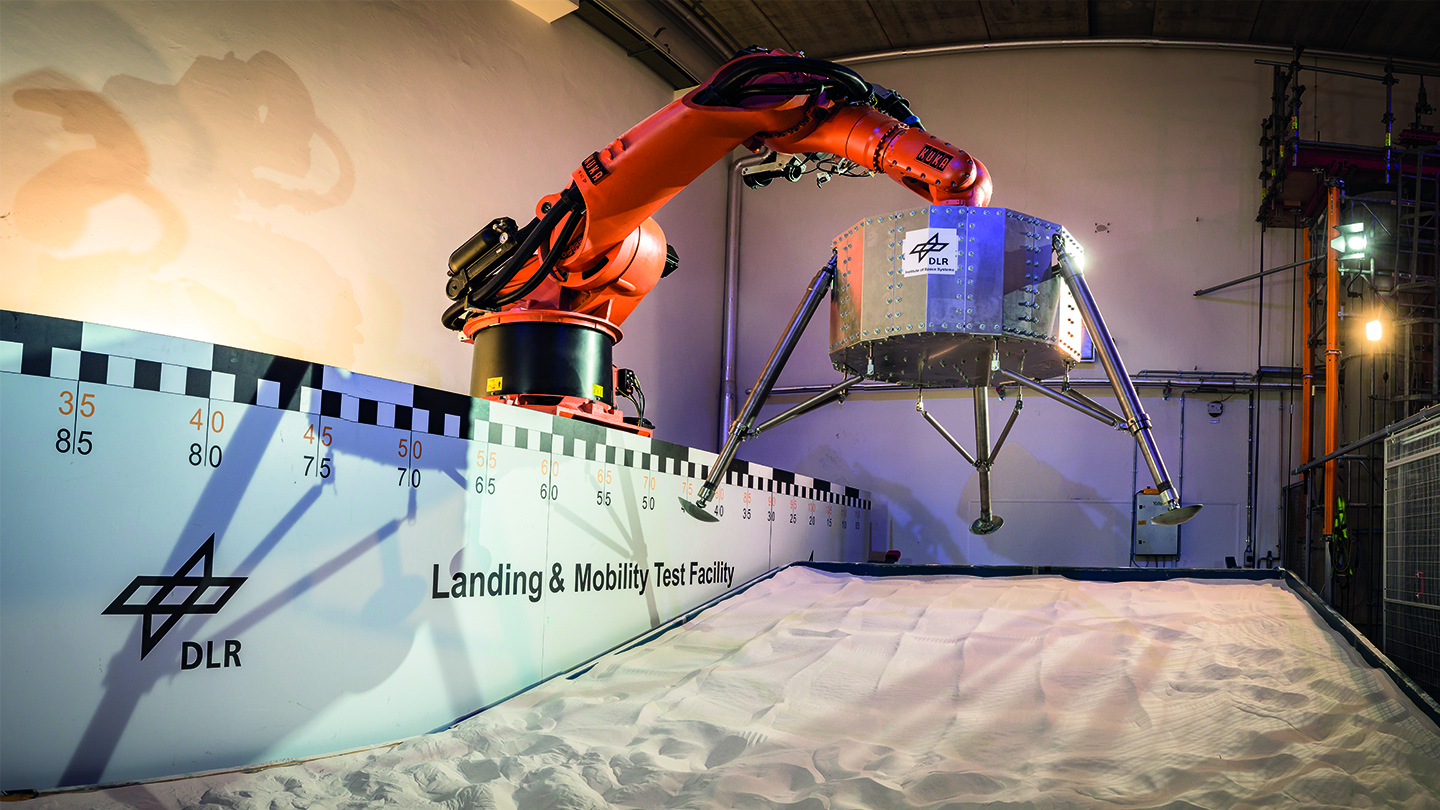
The Institute of Space Systems operates the Landing and Mobility Test Facility (LAMA) for development tests of landing and exploration vehicles.
The LAMA facility experimentally tests the dynamic behavior of planetary vehicles such as rovers or landers in the final landing phase up to ground contact. The test objects and models are used to prove that they exhibit similar dynamic behavior and that identical loads act on shock absorbers, chassis and wheel suspensions.
The key elements of the facility are a robotic arm for the test object handling and a soil bin to contain a planetary surface set-up. The main reason for using an industrial robot is to provide a fully active, self-supporting and highly flexible device to maintain various load scenarios and different test objects. A large variety of additional off the shelf hardware and support such as software and sensor systems are available from service suppliers from the industrial automation branch. The nominal static load bearing capacity of this robot is 500kg. It sits atop a rail track system allowing a lateral travel distance of 10m. The soil bin contains the planetary soil simulant and, if needed, other terrain features. It has overall dimensions of 10m x 4m. A section of 4m x 4m is tiltable to provide slopes between 0° and 30° in 5° steps. The soil depth is 0.25m in the ramp area and 0.5m in non-tiltable area.
The facility offers two major test modes:
- the weight off-loading mode and
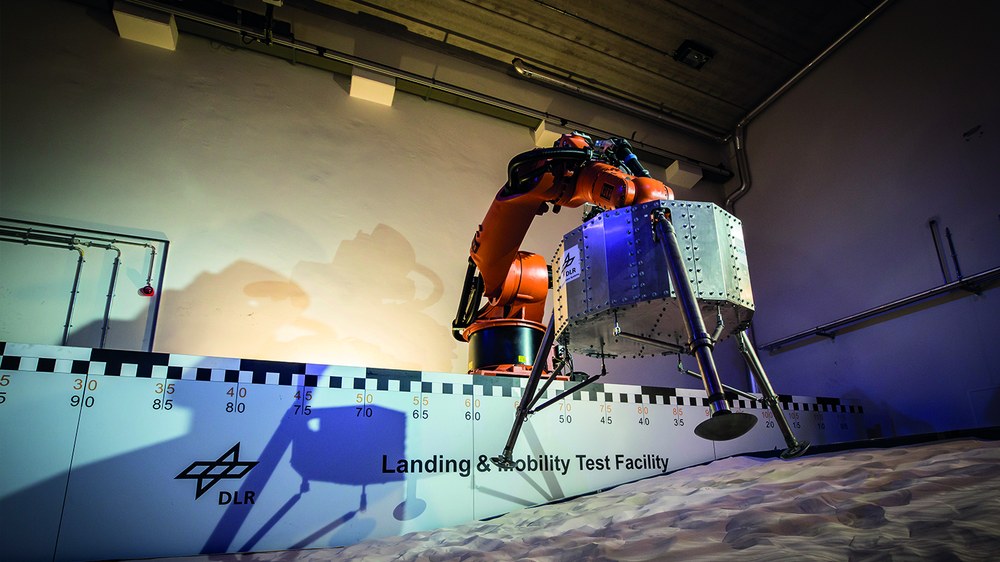
- the drop test mode
Both modes require a dedicated element which provides the link between robot hand flange and test object. This is a suspension device especially developed and patented for the weight off-loading mode and a commercial off the shelf gripper to release an object in the drop test mode.
Weight off-loading: The test object is hereby permanently suspended and off-loaded during the test. The test object suspension fulfils three functions:
transmit a (quasi-)static reduction or weight off-loading force,
provide sufficient degree of freedom to the test object and
decoupling the dynamics between the robot and the test object.
To ensure this, a set of tension springs is selected and used depending on the mass of the test object. This test mode was used, for example, for the landing test of the Rosetta lander Philae.Drop Test: The release mechanism for model drop tests uses an off the shelf pneumatic gripper mounted to the robots hand flange. The work pressure to operate the gripper is directed by a manifold valve which receives its lock/release signals from the robots real-time controller. The gripper’s jaws engage into a dedicated form fit interface mounted on the test object.
The Landing and Mobility Test Facility is complemented by component level test rigs. A single leg drop test stand is used for development and qualification tests with full-scale (~2.5m height, 250kg lander mass/leg) landing gear assemblies.