
Lande- und Mobilitätstestanlage

{kind=link}

{kind=link}

{kind=link}
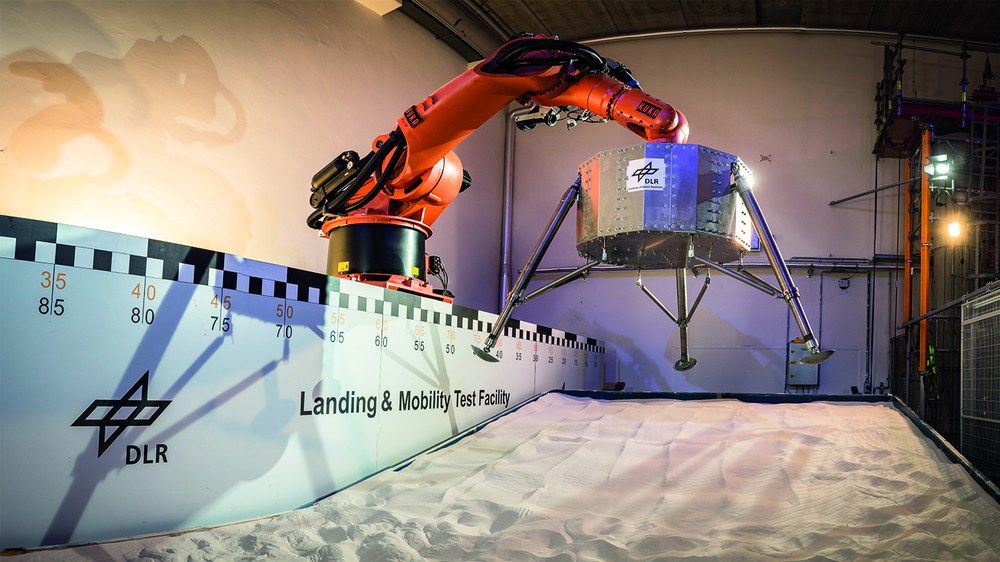
Das Institut für Raumfahrtsysteme betreibt die Lande- und Mobilitätstest Anlage (LAMA) für Entwicklungstests von Lande- und Erkundungsfahrzeugen.
Die LAMA-Anlage testet experimentell das dynamische Verhalten von planetaren Fahrzeugen, wie zum Beispiel Rover oder Lander, in der finalen Landephase bis zum Bodenkontakt. Die Testobjekte und Modelle werden eingesetzt für die Beweisführung, dass sie ein ähnliches dynamisches Verhalten aufweisen und identische Belastungen auf Stoßdämpfer, Fahrwerke und Radaufhängungen wirken.
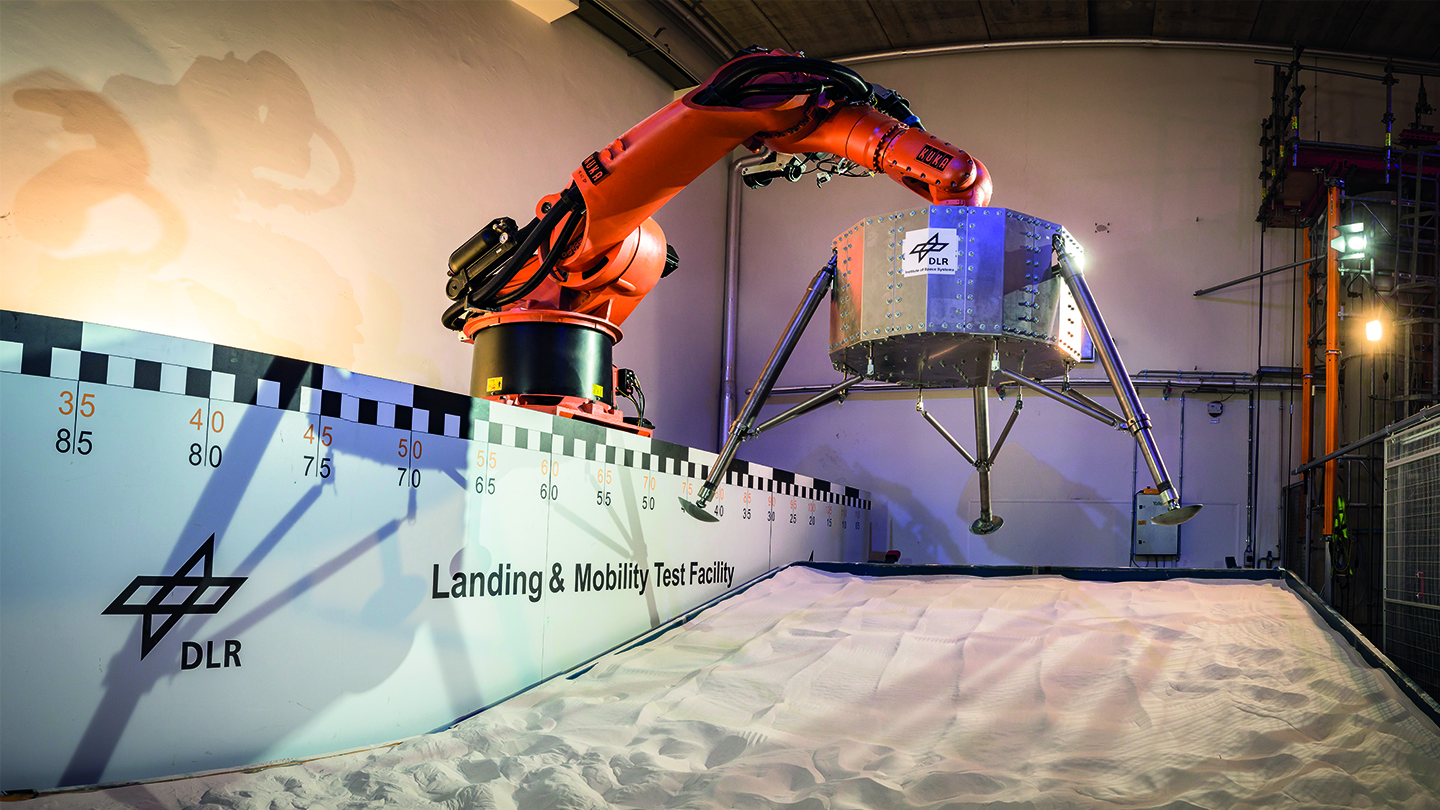
Die Schlüsselelemente der Anlage sind ein Roboterarm, für die Handhabung der Testobjekte, sowie ein Bodenbehälter, welcher die jeweilige Planetenoberfläche darstellt. Für die Nutzung der Anlage wurde ein industrieller Roboter gewählt, um eine vollständig, autarke und hoch flexible Möglichkeit zu schaffen eine Vielzahl von unterschiedlichen Testobjekten und Szenarien zu erzeugen. Hinzu kamen unterschiedliche Hardware und Software Komponenten sowie Sensorsysteme aus der industriellen Automatisierungs-branche zum Einsatz. Die statische Traglast des Roboters liegt bei 500 kg. Dieser ist platziert auf einem Schienensystem, das einen Positions- und Verfahrweg von 10 m ermöglicht. Der 10 x 4 m weite Bodenbehälter enthält eine simulierte Planetenoberfläche, welche mit unterschiedlichen Merkmalen versehen werden kann. Eine Seite des Behälters mit einer Kantenlänge von 4 x 4 m ist kippbar um Steigungen zwischen 0° und 30° in 5° Schritten zu gewährleisten. Die Bodentiefe beträgt 0,25 m an der kippbaren Rampe und 0,5 m in der flachen Hauptsektion.
Die Einrichtung bietet zwei Testmodi:
- der Gewichtsentlastungs-Modus
- der Freifall-Modus
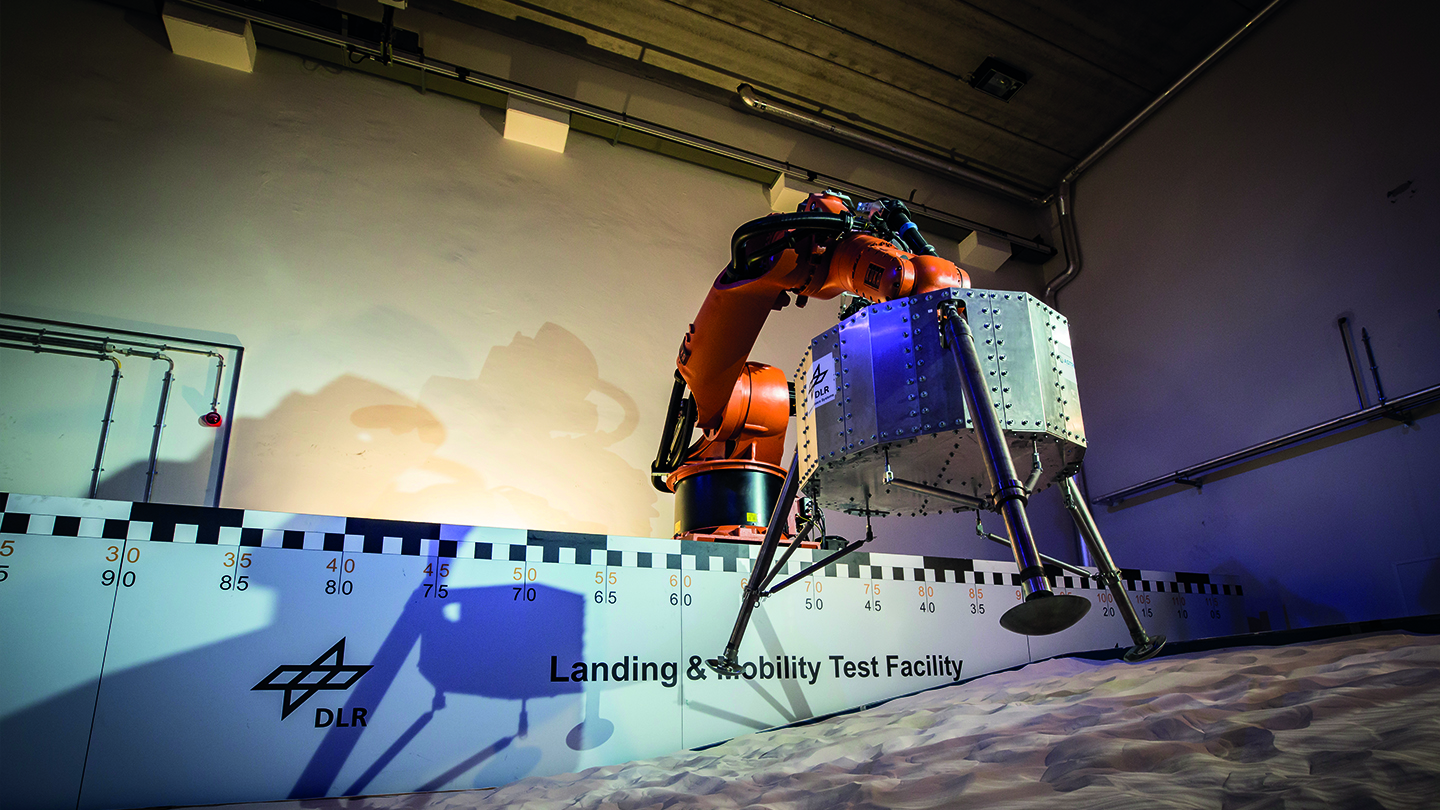
Beide Modi benötigen eine Aufhängevorrichtung zur Verbindung zwischen der Roboterhand und dem Testobjekt. Für den Falltest ist dies ein handelsüblichen pneumatischer Greifer, und für den Entlastungsmodus ein speziell entwickelter und patentierter Mechanismus zur Gewichtskompensation.
- Entlastungs-Modus: Das Testobjekt ist während eines Testlaufs dauerhaft aufgehängt und Gewichtsentlastet. Die Aufhängung des Testobjekts erfüllt hierbei drei Funktionen:
- die Übertragung einer (quasi)-statischen Gewichtsreduzierung oder Entladekraft,
- die Ermöglichung einer ausreichende Beweglichkeit des Testobjektes sowie
- die Entkopplung der Dynamik zwischen dem Roboter und dem Testobjekt. Um dies zu gewährleisten, wird ein Set von Zugfedern, abhängig von der Masse des Testobjektes, ausgewählt und eingesetzt. Dieser Testmodus wurde z.B. für die Landetest des Rosetta Landers Philae genutzt.
- Freifall-Modus: Der Auslösemechanismus für einen Falltest nutzt einen herkömmlichen pneumatischen Greifer, der an die Roboterhand montiert ist. Der Arbeitsdruck für den Greifer wird mittels einem Verteilerventil aufgebracht und das Signal zum Schließen und Lösen wird über das Echtzeitsteuerprogramm des Roboters kommandiert.
Die Lande- und Mobilitätstest Anlage wird durch Prüfstände auf Komponentenebene ergänzt. Der Einzelbeinteststand wird für Entwicklungen und Qualifikationstests von Landewerken in Originalgröße genutzt (~ 2,5 m Höhe, 250 kg Landermasse für Einzelbein).