
Wireless Compose

{kind=link}

{kind=link}
{kind=link}
Wireless Compose
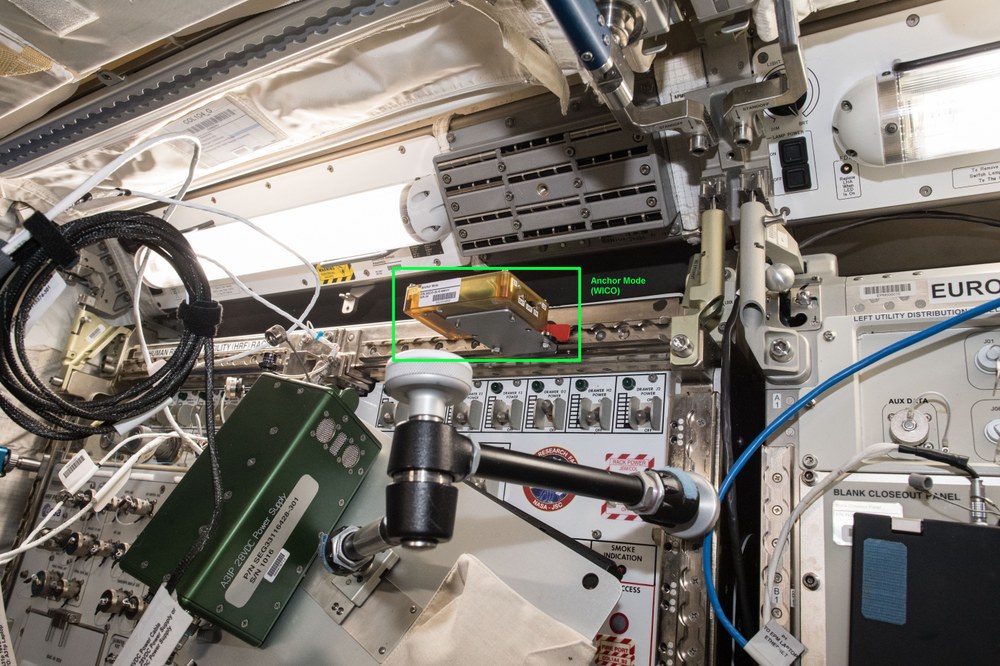
Wireless Compose is a technical experiment that demonstrates a wireless communication network for the efficient reading of sensors and localization of objects within the Columbus module.
The ultra-wideband is used for wireless transmission, which offers significant advantages for indoor communication. Among other things, other RF systems in use are not disturbed by the very low spectral power density. Reflections that occur inside the ISS also have only a negligible effect on signal quality. Energy harvesting plays a key role in this ISS experiment - the energy from artificial light sources on the Columbus module is used to operate the experiment efficiently.
Wireless networks are already used in many safety-relevant systems to enable uncomplicated and reliable communication, even over long distances. The first WiFi nodes have also already been installed on the ISS and experiments have already been carried out to read out sensor data wirelessly. Wireless Compose (communication and positioning experiment) is intended to expand the possibilities of such sensor networks by using a technology that allows interference-immune communication. In addition, the same technology also makes it possible to determine the position and thus monitor and track the movement of objects and astronauts.
What technology is used?
The technology used is based on the Impulse Radio - Ultrawideband (IR-UWB). The emitted pulses spread the signal to be transmitted over a bandwidth of 500 MHz. Compared to a conventional Wireless Sensor Network (WSN) in the 2.45 GHz range, this keeps the spectral power density very low so that other radio-sensitive systems are not disturbed and the system's own communication is also less susceptible to external interference. The technology is also virtually immune to multipath interference, which makes it particularly suitable for applications within enclosed spaces, such as an ISS module. Another feature is the measurement of transit times of the emitted pulses in order to perform a distance measurement. This can then be used to determine the position of several nodes.
Commercial components are used in the experiment, which allow a very energy-efficient solution and thus also enable battery-free operation via energy harvesting. One challenge for commercial components, however, is the radiation environment inside the ISS, the effects of which will also be investigated during the experiment.
Scientific Goal
The scientific objective is to demonstrate a combined localization and communication network for reading sensor data that can be used on the ISS and beyond for manned spaceflight and future exploration missions. The project will investigate the limitations imposed by the extreme conditions typical of the ISS and the potential for further use of the system. In particular, the following will be investigated:
- The feasibility and accuracy achieved when determining the position within a module
- Efficiency in the operation of communication networks for monitoring environmental parameters within a habitat / ISS module
- Signal quality of a UWB network within the ISS module (interference from other RF systems, reflections, etc.)
- Investigation of possible radiation effects
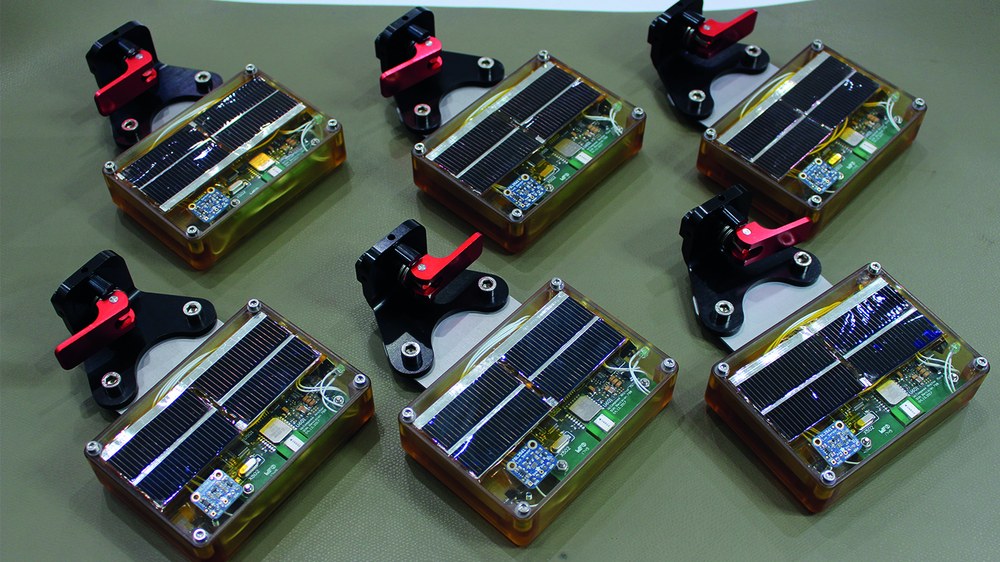
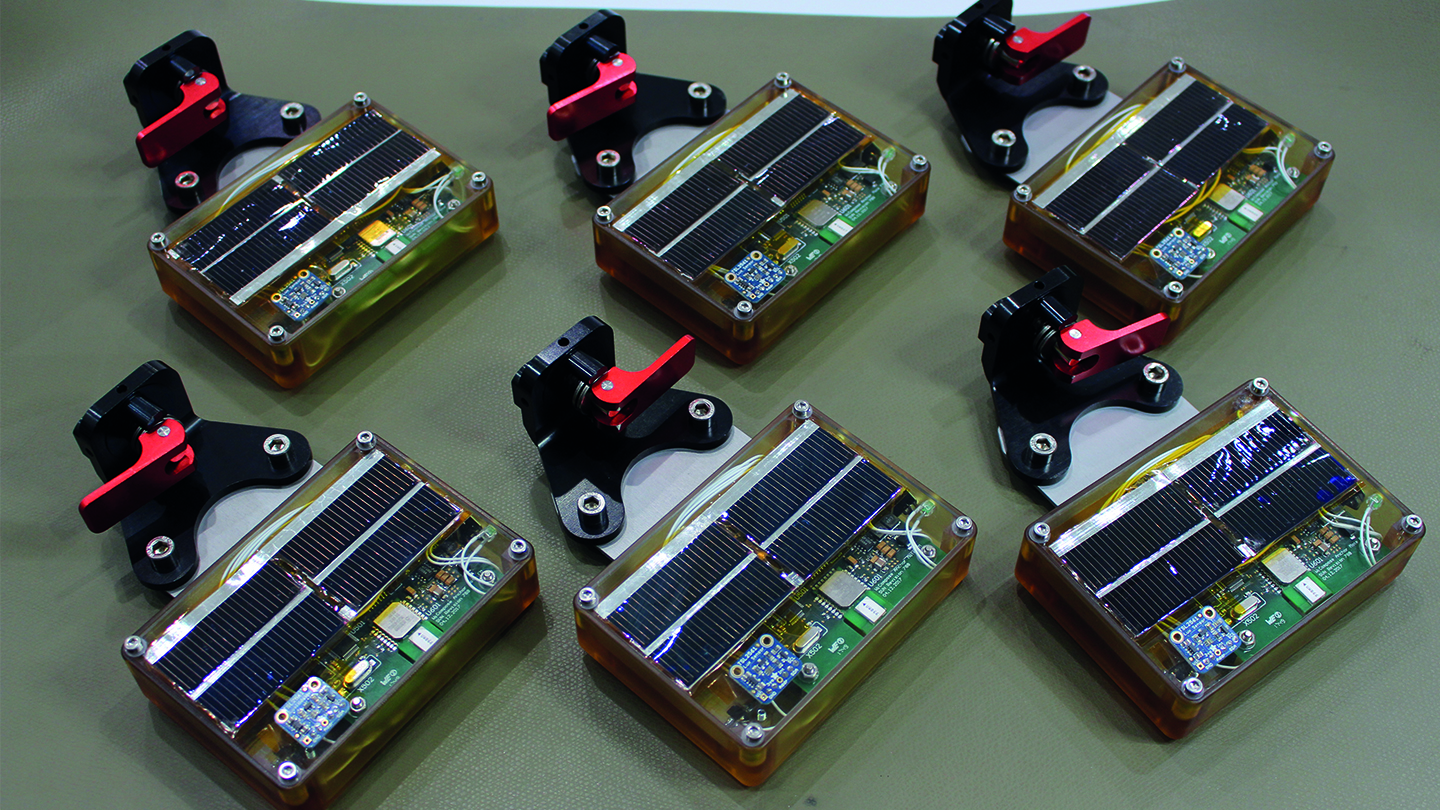
- Battery-free operation by recovering energy from artificial light sources (solar operation)
- Investigation of degradation and long-term operation of the components used
Experiment Operation
Parallel to the ISS flight experiment, the ground reference model is running in the EDEN ISS Greenhouse in Antarctica. The WICO experiment hardware consists of 7 wireless modules and a central unit that is supplied with power via USB:
- 5 Anchor-Motes: These units are attached to fixed positions within the Columbus module. They contain various sensors for monitoring environmental parameters such as temperature and air pressure. They also serve as anchor points for the transit time measurements to the mobile unit. These units can be powered either by batteries or solar cells.
- 2 tag motes: These are the mobile sensor units worn by the astronaut. They can be used to determine the distance to the anchor motes. They are also equipped with additional sensors to measure movement sequences. Various sensors are used, including a rotation rate sensor and an acceleration sensor.
- 1 Base Station: This is the central unit that performs several tasks: Network management, collection of accumulated data and storage of these on an SD card. This is how the scientific data is transferred to the ground segment. The Base Station is permanently supplied with power via a USB cable.
The experiment consists of 3 phases in which different aspects are investigated:
- 3 tracking sessions, in which the astronaut's movements and positions are recorded and examined
- Anchor motes in battery mode - they record environmental parameters and transmit them to the base station
- Operation of the anchor motes in energy harvesting mode
Why the ISS?
The ISS, with its special requirements for manned spaceflight, offers the unique opportunity to use it as a testbed to test and further improve wireless communication technologies for future manned and exploration missions. Positioning also offers further potential for use, for example in the inventory process within the ISS or in tracking the movements of astronauts in order to make work processes and movement sequences more efficient. This means that the functionality of the technologies already in use could be supplemented or expanded in the future.
Mission | Part of the Horizons - Alexander Gerst - Mission |
WICO operations timeline (ISS) | 06. Jun 2018 – Jan 2019 |
WICO operations timeline (EDEN-ISS) | Feb 2018 – Dec 2018 |
Launch | 21.05.2018, Cygnus (Orbital ATK) OA-9 |
Return | SpX, Dragon |
Characteristics | Sensing, Tracking, Energy Harvesting, IR-UWB |
Scientists | M. Drobczyk, C. Strowik, C. Hobbie, C. Philpot |
Supported by | DLR Raumfahrtmanagement (Missionsmanagement #horizons) |
USOC | EAC-DLR |
#WICO_ISS |
Future applications
Conducting the experiment on the ISS also enables practical evaluation of this technology under real conditions, and the results obtained could also be used in the maritime sector or anywhere where GPS signals do not penetrate, be it indoors or in mining, for example.
Wireless Compose Data at a Glance:
Publications:
M. Drobczyk, C. Strowik and C. Philpot, “A wireless communication and positioning experiment for the ISS based on IR-UWB”, presented at IEEE WCNC 2016, San Francisco, USA, Mar 19-22, 2016.
M. Drobczyk, M. Lehmann and C. Strowik, “EMC characterization of the UWB-based wireless positioning and communication experiment (wireless Compose) for the ISS”, presented at IEEE WISEE 2017, Montreal, USA, Oct 10-12, 2017.