
Wireless Compose


{kind=link}

{kind=link}
{kind=link}
Wireless Compose ist ein technisches Experiment, das ein drahtloses Kommunikationsnetzwerk zum effizienten Auslesen von Sensoren und zur Lokalisation von Objekten innerhalb des Columbus Moduls demonstriert.
Für die drahtlose Übertragung wird das Ultra-Wideband genutzt, das wesentliche Vorzüge für die Indoor-Kommunikation bietet. Unter anderem werden andere im Einsatz befindliche HF Systeme durch die sehr geringe spektrale Leistungsdichte nicht gestört. Auch beeinflussen Reflektionen, wie sie innerhalb der ISS vorkommen nur unwesentlich die Signalqualität. Eine wesentliche Rolle bei diesem ISS Experiment spielt das Energy Harvesting - die Energie künstlicher Lichtquellen des Columbus-Moduls wird genutzt, um das Experiment effizient zu betreiben.
Drahtlose Netzwerke werden bereits in vielen sicherheitsrelevanten Systemen eingesetzt, um eine unkomplizierte und zuverlässige Kommunikation, auch über weitere Distanzen zu ermöglichen. Auch auf der ISS wurden bereits die ersten WLAN-Knoten installiert und es wurden bereits Experimente zum drahtlosen Auslesen von Sensordaten durchgeführt. Wireless Compose (communication and positioning experiment) soll die Möglichkeiten solcher Sensor-Netzwerke erweitern, indem es eine Technologie einsetzt, die störungsunempfindliche Kommunikation erlaubt. Zudem ermöglicht dieselbe Technologie auch eine Positionsbestimmung und somit auch die Bewegungsüberwachung und -verfolgung von Objekten und Astronauten.
Welche Technologie wird verwendet?
Die eingesetzte Technologie basiert auf dem Impulse Radio – Ultrawideband (IR-UWB). Durch die ausgesendeten Impulse wird das zu übertragende Signal auf 500MHz Bandbreite gespreizt. Gegenüber einem konventionellen Wireless Sensor Network (WSN) im 2.45 GHz Bereich wird dadurch die spektrale Leistungsdichte sehr niedrig gehalten, so dass andere funksensible Systeme nicht gestört werden und die eigene Kommunikation auch unanfälliger für externe Störungen ist. Zudem ist die Technologie nahezu immun gegenüber Mehrweg-Interferenzen, was sie insbesondere für die Anwendungen innerhalb geschlossener Räumlichkeiten, wie z.B. eines ISS-Moduls qualifiziert. Ein weiteres Feature ist die Messung von Laufzeiten der ausgesendeten Pulse, um eine Entfernungsmessung durchzuführen. Diese kann bei mehreren Knoten dann zu einer Positionsbestimmung genutzt können.
Im Experiment werden kommerzielle Bauteile eingesetzt, die eine sehr energieeffiziente Lösung erlauben und dadurch auch batterielosen Betrieb über Energy Harvesting ermöglichen. Eine Herausforderung für kommerziellen Bauteile ist aber die Strahlungsumgebung innerhalb der ISS, deren Auswirkungen auch innerhalb der Experimentlaufzeit untersucht werden.
Wissenschaftliches Ziel
Das wissenschaftliche Ziel ist die Demonstration eines kombinierten Lokalisations- und Kommunikationsnetzwerks zum Auslesen von Sensordaten, die auf der ISS und darüber hinaus für die bemannte Raumfahrt und zukünftige Explorationsmissionen genutzt werden können. Dabei wird untersucht, welche Einschränkungen durch die extremen - für die ISS-typischen - Bedingungen existieren und durch welches weitere Nutzungspotential das eingesetzte System geprägt ist. Insbesondere soll dabei untersucht werden:
- die Machbarkeit und erzielte Genauigkeit bei Positionsbestimmung innerhalb eines Moduls
- Effizienz im Betrieb von Kommunikationsnetzwerken zur Überwachung von Umweltparameters innerhalb eines Habitats / ISS-Moduls
- Signalqualität eines UWB-Netzwerks innerhalb des ISS-Moduls (Störung durch andere RF Systeme, Reflektionen, etc.)
- Untersuchung möglicher Strahlungseffekte
- Batterieloser Betrieb durch die Rückgewinnung der Energie aus künstlichen Lichtquellen (Solarbetrieb)
- Untersuchung der Degradation und Langszeitbetrieb der eingesetzten Komponenten
Experimentendurchführung
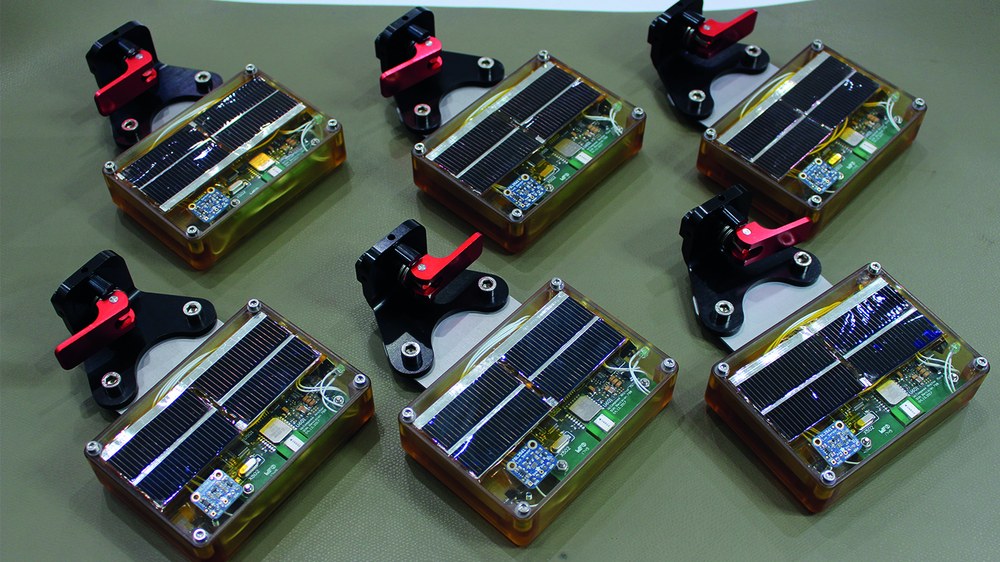
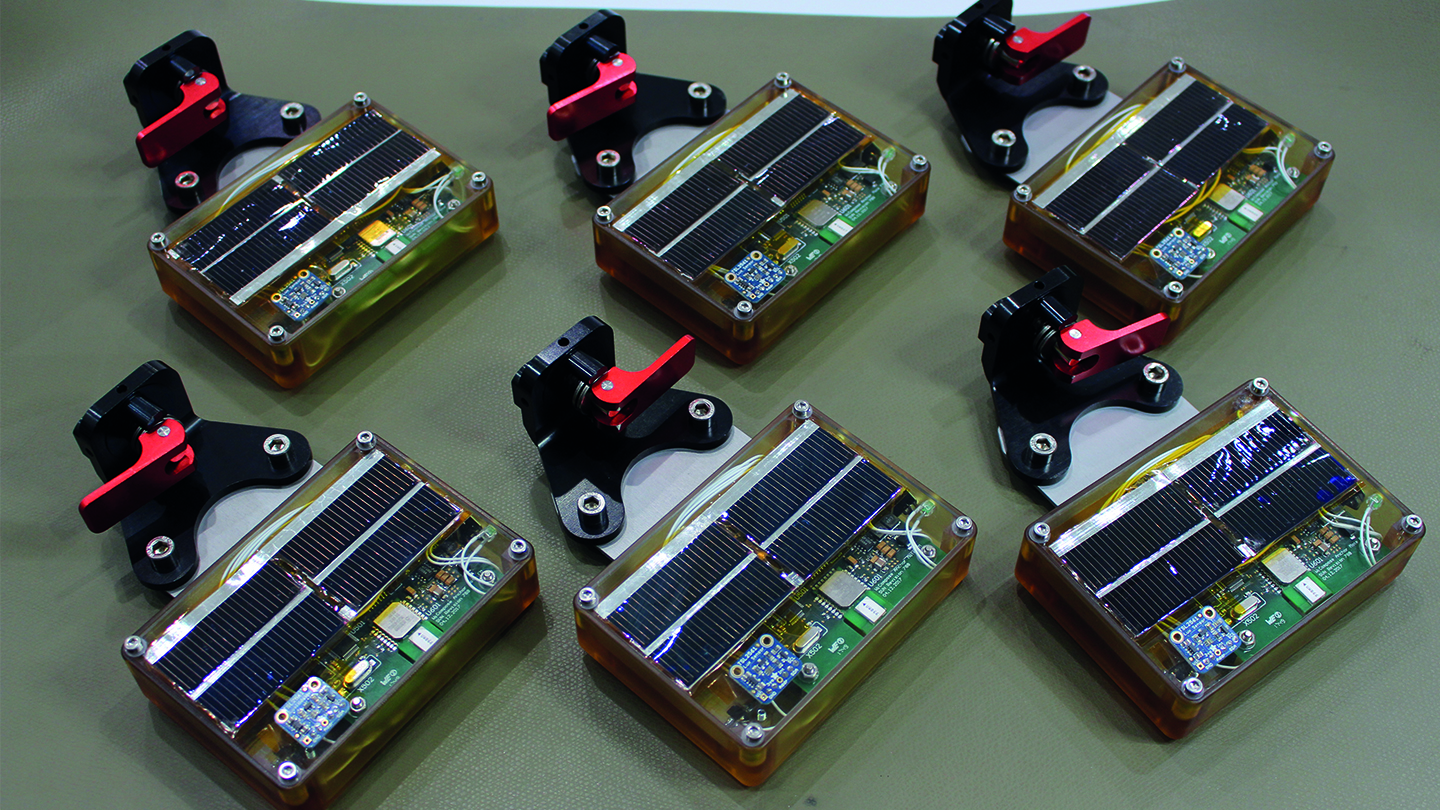
Parallel zum ISS Flugexperiment läuft das Bodenreferenzmodell im EDEN ISS Greenhouse in der Antarktis. Die WICO Experiment-Hardware besteht aus 7 drahtlosen Modulen, sowie einer Zentraleinheit, die über USB mit Strom versorgt wird:
- 5 Anchor-Motes: Diese Einheiten sind an festgelegten Positionen innerhalb des Columbus-Moduls befestigt. Sie beinhalten verschiedene Sensoren zur Überwachung von Umweltparametern, wie z.B. Temperatur und Luftdruck. Sie dienen gleichzeitig auch als Ankerpunkte für die Laufzeitmessungen zu der mobilen Einheit. Diese Einheiten können entweder mit Batterien oder durch Solarzellen betrieben werden.
- 2 Tag-Motes: Diese sind die mobilen Sensoreinheiten, die vom Astronauten getragen werden. Durch sie kann die Distanz zu den Anchor-Motes bestimmt werden. Zudem sind sie mit weiteren Sensoren ausgestattet, um Bewegungsabläufe zu messen. Dabei werden verschiedene Sensoren eingesetzt, u.a. ein Drehratensensor und ein Beschleunigungssensor.
- 1 Base Station: Sie ist die Zentraleinheit, die mehrere Aufgaben übernimmt: Netzwerkverwaltung, Sammlung angefallener Daten und Speicherung dieser auf eine SD Karte. So werden die wissenschaftlichen Daten zum Bodensegment übertragen. Die Base Station wird über ein USB Kabel permanent mit Strom versorgt.
Das Experiment besteht aus 3 Phasen, in denen verschiedene Teilaspekte untersucht werden:
- 3 Tracking-Sessions, in denen die Bewegungen und Positionen des Astronauten aufgenommen und untersucht werden
- Anchor-Motes im Batteriebetrieb – sie nehmen Umgebungsparameter auf und übertragen diese zur Base Station
- Betrieb der Anchor-Motes im Energy Harvesting Modus
Weshalb die ISS?
Die ISS mit ihren besonderen Anforderungen für die bemannte Raumfahrt bietet die einzigartige Möglichkeit sie als Testbed zu nutzen, um drahtlose Kommunikationstechnologien für zukünftige bemannte, sowie Explorationsmissionen zu testen und weiter zu verbessern. Aber auch die Positionsbestimmung bietet ein weiteres Nutzungspotential, wie z.B. beim Inventarisierungsprozess innerhalb der ISS oder bei der Bewegungsverfolgung von Astronauten, um gezielt Arbeitsprozesse und Bewegungsabläufe effizienter machen zu können. Dadurch könnten die bereits angewendeten Technologien in Ihrer Funktionalität zukünftig ergänzt bzw. erweitert werden.
Zukünftige Anwendungen
Die Durchführung des Experiments auf der ISS ermöglicht dadurch zudem eine praktische Evaluierung dieser Technologie unter realen Bedingungen, und die daraus gewonnenen Ergebnisse könnten auch im maritimen Bereich oder überall dort eingesetzt werden, wo GPS-Signale nicht durchdringen, sei es im Indoor-Bereich oder z.B. im Bergbau.
Mission | Teil der horizons – Alexander Gerst – Mission |
WICO Betriebszeitraum (ISS) | 06. Juni 2018 – Januar 2019 |
WICO Betriebszeitraum (EDEN-ISS) | Februar 2018 – vor. Ende 2018 |
Launch | 21.05.2018, Cygnus (Orbital ATK) OA-9 |
Rückkehr | Voraussichtlich SpX, Dragon |
Eigenschaften | Sensing, Tracking, Energy Harvesting, IR-UWB |
Wissenschaftliche Begleiter | M. Drobczyk, C. Strowik, C. Hobbie, C. Philpot |
Unterstützt durch | DLR Raumfahrtmanagement (Missionsmanagement #horizons) |
USOC | EAC-DLR |
Twitter | #WICO_ISS |
Zukünftige Anwendungen
Die Durchführung des Experiments auf der ISS ermöglicht dadurch zudem eine praktische Evaluierung dieser Technologie unter realen Bedingungen, und die daraus gewonnenen Ergebnisse könnten auch im maritimen Bereich oder überall dort eingesetzt werden, wo GPS-Signale nicht durchdringen, sei es im ¬¬ Indoor-Bereich oder z.B. im Bergbau.
Wireless Compose Daten kompakt:
Referierte Publikationen:
M. Drobczyk, C. Strowik and C. Philpot, “A wireless communication and positioning experiment for the ISS based on IR-UWB”, presented at IEEE WCNC 2016, San Francisco, USA, Mar 19-22, 2016.
M. Drobczyk, M. Lehmann and C. Strowik, “EMC characterization of the UWB-based wireless positioning and communication experiment (wireless Compose) for the ISS”, presented at IEEE WISEE 2017, Montreal, USA, Oct 10-12, 2017.