

MAD – Managed Automated Driving
An intelligent system network of vehicle and infrastructure is created with completely new possibilities for flexible design strategies.
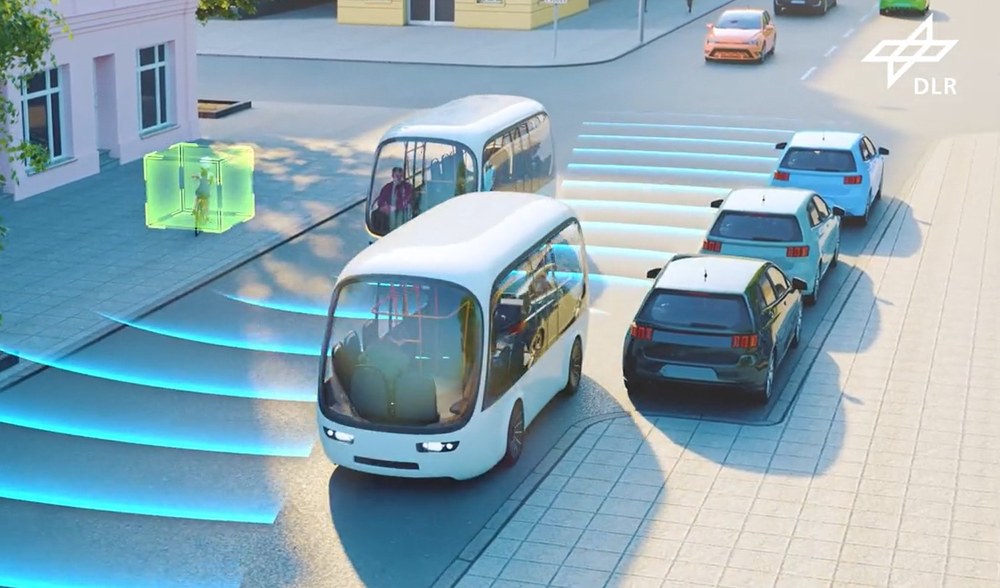
The intensive use of the infrastructure systems for MAD in urban areas, enables a safe and economical operation of automated vehicles. Thanks to the comprehensive traffic detection in complex traffic areas, U-Shift can then also drive at normal speeds (up to 70 km/h) in the city.
Most of today’s people movers usually drive at walking speed because their vehicle automation simply does not "see enough". A simple infrastructure support for automated vehicles to expand the "field of vision" is basically nothing new and is already being used in some research projects. However, essential and computing-power-intensive automation functions are always implemented in the vehicle. With an increasing number of automated vehicles in the cities, this is no longer effective. At a high level of market penetration for automated vehicles, especially for complex urban traffic areas, the allocation of automation functions in the infrastructure is challenging but economic. In the future, there is a sensor on almost every lamp post and the vehicles are simply remote-controlled. Despite the somewhat higher initial investment, this pays off even with a small fleet and makes automated driving really safe!
MAD managed automated driving
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Project goals and content
The central goal of the "MAD Urban" project is to implement MAD automation for the first time and to demonstrate it in an application. The DLR Institute for Vehicle Concepts wants to operate U-Shift and other automated vehicles with this new type of automation 'MAD' in the future in order to be able to operate a larger fleet safely and economically during a roll-out. We have the overall project management and develop special vehicle functions for MAD on the U-Shift development platform (see project U-Shift 33). Our internal partner, the DLR Institute for Transport System, is involved with a focus on automation design, intelligent infrastructure and technical supervision. The FZI (Research Center for Information Technology) focuses on perception and localization. These two research partners contribute, among the MAD development, with the test fields AIM, TFN (test field Lower Saxony) and the TAF-BW (test field automated driving Baden-Württemberg) as well with their own automated vehicles. MAD is implemented there and cross-tested to ensure comprehensive compatibility at an early stage.
Our partner Intel takes care of security. Moving driving functions to the infrastructure requires new safety concepts. On the one hand, to use the systemic safety advantage of MAD through many infrastructure sensors in normal operation, but also to activate emergency trajectories if communication channels fail.
The comprehensive management of a large amount of infrastructure and vehicle data is in the hands of our partner GFT. He is developing the data hub for the backend and the new remote workstations for the frontend with which the U-Shift fleet is to be operated.
Efficient, compact and cost-effective infrastructure sensors and their data pre-processing are essential for the success of MAD. To this end, our two partners VITRONIC - as a leading provider of traffic monitoring systems - and MATRIX VISION - a passionate specialist in image processing technology - are developing the next generation of RCUs (Road Capturing Units).
Other affiliated partners and suppliers support and in various areas.
The new MAD functions as well as comprehensive tests and demonstrations are planned as project results. We will document the MAD solution in detail in an architecture white paper and make it available to the automation community.
Sponsor

BMWK
Duration
07/2022 – 06/2025