
MAREVIS3D

Motivation
Festinstallierte optische Sensorsysteme bieten die Möglichkeit einer schnellen Situationsbeurteilung von maritimen Infrastrukturen für Beobachtung, der Koordinierung von Logistik, Sicherheit und Gefahrenabwehr. Um eine gute Flächenabdeckung mit Kameras zu erreichen, werden entsprechend viele Videofeeds benötigt. Aufgrund der hohen Menge an Informationen ist es für Personal unter Umständen nicht einfach, alle relevanten Objekte wie Schiffe, Fahrzeuge oder andere dynamische Elemente im Auge zu behalten. Daher ist es wichtig, die automatische Erkennung von Objekten zu ermöglichen, einschließlich der Extraktion ihrer Schlüsselparameter, die dann in ein leicht verständlicher Form - zum Beispiel auf einer Karte - dargestellt werden. Bei zweidimensionalen (2D) Karten ist die Darstellung von Objekten in Bezug auf die Genauigkeit der dargestellten Informationen wie Höhe und Objekttiefe begrenzt. Dreidimensionale (3D) Visualisierung hingegen, bietet mehr räumliche und semantische Informationen über die Situation. Dies erfordert die 3D-Rekonstruktion der erkannten Objekte für deren Darstellung auf einer statischen 3D-Karte. Hochauflösende Kamerabilder, die von einem lokalen Server analysiert werden, können zu Bandbreitenverlusten, Latenz und zeitlicher Verzögerung führen, wodurch die Echtzeitfähigkeit des Systems beeinträchtigt wird. On-site installierte Edge Nodes, die mit eingebetteten Systemen und integrierten, hochauflösenden Kameras ausgestattet sind, ermöglichen dagegen eine schnellere und effizientere Verarbeitung.
Ziele und Vorgehen
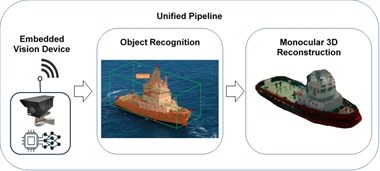
Das Hauptziel ist die Erforschung und Entwicklung einer einheitlichen Pipeline für die automatische Erkennung und 3D-Rekonstruktion von Objekten und deren Features für ein maritimes Echtzeit-Lagebild. Dies wird durch den Einsatz eines eingebetteten Systems mit integrierter hochauflösender Kamera, KI-Algorithmen und neuartigen 3D-Rekonstruktionstechniken erreicht, um komprimierte und semantisch wertvolle Lageinformationen zu liefern. Die Auswahl geeigneter eingebetteter Systeme, sowie die Integration über Webschnittstellen in ein Lagebildtool sind weiterer Bestandteil der Entwicklung.
Innovationen und Perspektiven
Resultierende Technologien werden eine eingebettete End-to-End-Pipeline für die hochauflösende maritime Objekterkennung in weicher Echtzeit und monokulare 3D-Rekonstruktion sein. Die Hauptanwendung von MAREVIS 3D ist für Behörden oder Unternehmen geeignet, die ein Lagebild zur Verbesserung der Sicherheit kritischer maritimer Infrastrukturen benötigen. Zu den Endnutzern könnten Hafenbehörden, Notdienste oder die Industrie für autonomes Fahren/Navigation gehören.
Projektlaufzeit: 01.01.2023 - 31.12.2025