
TRAGVIS
Motivation
Mit optischen Sichtsystemen können unter anderem der Schutzstatus maritimer Infrastrukturen (z.B. Hafenanlagen, Containerterminals und Offshore-Windparks) überwacht, sowie die Sicherheit der auf See arbeitenden Menschen verbessert werden. Seeunfälle können jederzeit, überall und unter widrigen Wetterbedingungen stattfinden. Resultierende Rettungsmaßnahmen dauern fallabhängig mehrere Stunden, zum Teil sogar mehrere Tage an.
Zur effektiven Durchführung von Rettungsmaßnahmen bei Nacht sind das menschliche Auge und passive Instrumente meist nur unzureichend zur Situationserfassung geeignet. Zusätzlich sind die Sichtbedingungen oft stark eingeschränkt – beispielsweise durch starken Regen oder dichte Nebelbänke – so dass klassische visuelle Erkundungssysteme weitgehend wirkungslos bleiben. In solchen Fällen stellen aktive Sensorsysteme mit einer eigenen Lichtquelle einen Lösungsansatz mit nennenswertem Potenzial dar.
Ziele und Vorgaben
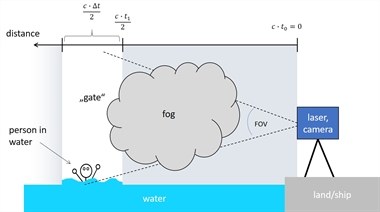
Das Projekt TRAGVIS (Tragbares RAnge-Gated Viewing System) widmet sich der Entwicklung eines aktiven Gated-Viewing Systems für maritime Such- und Rettungsdienste. Range-gating-Systeme bestehen aus Kamerasystemen, die mit einer aktiven, gepulsten (Laser-) Beleuchtung arbeiten. Dabei werden die Beleuchtungsimpulse der Lichtquelle und die Verschlusszeiten der Kamera synchronisiert. Dies bewirkt, dass das atmosphärische Rückstreusignal – verursacht durch Partikel und Wassertröpfchen – größtenteils unterdrückt wird. Zudem lassen sich unterschiedliche Tiefenebenen des Bildausschnitts darstellen.

Derzeit verfügbare Range-gating-Systeme sind zumeist relativ groß und schwer. Um sie effektiv, insbesondere auf kleineren Seenotrettungsbooten, einsetzen zu können, müssen die Sensoren leicht und kompakt ausgelegt sein. Das Projekt TRAGVIS hat sich deshalb das Ziel gesetzt, einen preiswerten und kompakten Range-gating-Sensor zu entwickeln, der sich an den Bedarfen der Endnutzer orientiert. Zu diesem Zweck, sowie der anschließenden Sensorerprobung auf See, wurde ein Kooperationsvertrag mit der Deutschen Gesellschaft zur Rettung Schiffbrüchiger (DGzRS) geschlossen.
Dafür wurden im ersten Abschnitt des Projekts zunächst verfügbare Technologien für den Detektor und die aktive Beleuchtung identifiziert. Parallel dazu erfolgte eine Bedarfsanalyse.
Im zweiten Abschnitt wurde das Sensorsystem auf dem Dach des Instituts installiert. So konnten Langzeitdaten bei unterschiedlichen Sichtbedingungen erhoben und diese mit Simulationsdaten verglichen werden.

Im dritten Abschnitt wurde das auf den Ergebnissen der vorhergehenden Abschnitte optimierte Gerät in Kooperation mit der DGzRS auf einem Rettungskreuzer getestet . Im Fokus dieser Tests standen das Auffinden von Personen und spezifischer Gegenstände im Wasser.


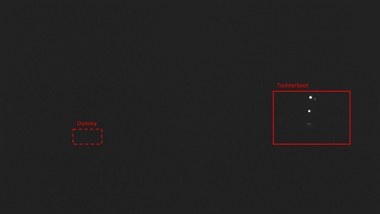
Die Ergebnisse der Feldtests werden aktuell ausgewertet und sind hier exemplarisch für eine Szene dargestellt. In diesen Bildern ist dieselbe Szene mit unterschiedlichen Kamerasystemen zu sehen. Der linke Ausschnitt ist eine Aufnahme mit dem Gated-Viewing-System, in dem eine im Wasser treibende Rettungspuppe (Dummy) erkennbar ist. Bei diesem Test waren keine Reflektoren am Dummy befestigt, da auch bei im Wasser vermissten Personen nicht davon ausgegangen werden kann, dass Kleidung mit Retroreflektoren getragen wird. Das System muss also in der Lage sein, auch rein diffus reflektierende Gegenstände zu erkennen, die im Wasser treiben. Weiterhin ist das Tochterboot des Seenotrettungskreuzers neben dem Dummy klar zu erkennen. In der Mitte ist dieselbe Szene mit einer Thermalkamera aufgenommen. Das Tochterboot ist immer noch zu erkennen, der Dummy jedoch nicht. Rechts ist die Szene mit einer monochromen „normalen“ Kamera in dem für das menschliche Auge sichtbaren visuellen Spektralbereich abgebildet. Bis auf die Positionslichter des Tochterboots ist das Bild schwarz.
Innovationen und Perspektiven
Das primäre Ziel des Projektes ist die Realisierung eines kompakten Gated-Viewing Sensors basierend auf am Markt verfügbarer Technologie. Ein Hauptkriterium dabei ist die Kosteneffizienz, so dass das entwickelte System für den Einsatz durch maritime Such- und Rettungsdienste erschwinglich wird. In Kooperation mit der DGzRS wird die Tauglichkeit und das Potential eines solchen Sensors zum Auffinden vermisster Personen und Treibgut wie Wrackteilen, Trümmerteilen etc. im Wasser untersucht.
Weitere zentrale Aspekte des TRAGVIS-Projektes waren die Augensicherheit des Sensors, Software- und Algorithmen-Entwicklung sowie komplementärer Messungen der Umwelt- und Sichtbedingungen (z.B. Aerosole) zum Zweck der Charakterisierung des Systems. In den nachfolgenden Projekten MAI, HUMAN und MUM werden weitere Anwendungsfelder, wie z.B. der Einsatz auf anderen (z.B. fliegenden) Plattformen untersucht. Neben der Sichtverbesserung über Wasser, wird auch die Einsetzbarkeit der Gated-Viewing-Technologie unter Wasser im Projekt SUBVIS erforscht.
Wetterstation/Aerosoldaten
Zur Erforschung der Sichtverbesserung von Gated-Viewing-Systemen werden seit Sommer 2020 vom Dach des Instituts aus Partikel-Größenverteilungen mit einem PALAS Fidas 200 S Aerosolspektrometer gemessen. Diese Daten dienen in erster Linie der Charakterisierung der TRAGVIS-Systemperformance bei unterschiedlichen Umweltbedingungen, sind jedoch potentiell auch für andere Forschungsbereiche interessant (z.B. Meteorologie, Umweltwissenschaften) und werden von uns gerne zur Verfügung gestellt. Wenn Sie Interesse an diesen Daten haben, benutzen Sie bitte die Kontaktinformationen unten, um mit uns in Verbindung zu treten.
Projektlaufzeit: 01.06.2019 – 31.12.2022
Projektpartner:
- Deutsche Gesellschaft zur Rettung Schiffbrüchiger (DGzRS)
- OptoPrecision GmbH, Bremen
Publikationen
- Enno Peters, Jendrik Schmidt, Zsófia Jurányi, Marco W. Berger, Stefan Scherbarth, Frank Lehmann, "Development of a novel low-cost NIR gated-viewing sensor for maritime search and rescue applications," Proc. SPIE 11160, Electro-Optical Remote Sensing XIII, 1116004 (10 October 2019); https://doi.org/10.1117/12.2532538
- Zsófia Jurányi, Jendrik Schmidt, Enno Peters, Frank Lehmann, "Characterization of an affordable and compact gated-viewing system for maritime search and rescue applications," Proc. SPIE 11538, Electro-Optical Remote Sensing XIV, 1153805 (20 September 2020); https://doi.org/10.1117/12.2571142
- Jendrik Schmidt, Matthias Mischung, Enno Peters, Susanne Wollgarten, Maurice Stephan, "Long-term performance evaluation of a NIR gated viewing sensor in scattering environments," Proc. SPIE 11866, Electro-Optical and Infrared Systems: Technology and Applications XVIII and Electro-Optical Remote Sensing XV, 118660V (12 September 2021); https://doi.org/10.1117/12.2599892
- Enno Peters, Jendrik Schmidt, Matthias Mischung, Susanne Wollgarten, David Brandt, Marco Berger, David Heuskin, Maurice Stephan, "Comparison of the experimental, scientific gated-viewing sensor TRAGVIS and the commercial MODAR system during a field test," Proc. SPIE 11866, Electro-Optical and Infrared Systems: Technology and Applications XVIII and Electro-Optical Remote Sensing XV, 118660U (12 September 2021); https://doi.org/10.1117/12.2598151
- Peters, Enno, Peinecke, Niklas, Lüken, Thomas, & Stephan, Maurice. (2022, October 4). Simulation of a Gated-Viewing instrument for helicopter deck-landing assistance and vision enhancement. European Workshop on Maritime Systems Resilience and Security 2022 (MARESEC 2022), Bremerhaven, Germany. https://doi.org/10.5281/zenodo.7050983