The MASCOT lander

{kind=link}
{kind=link}
{kind=link}
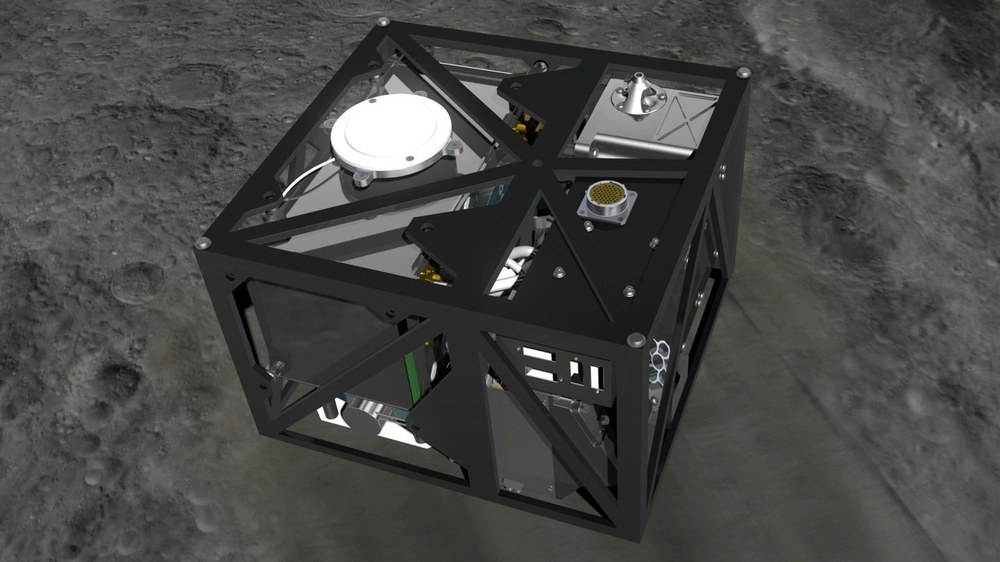
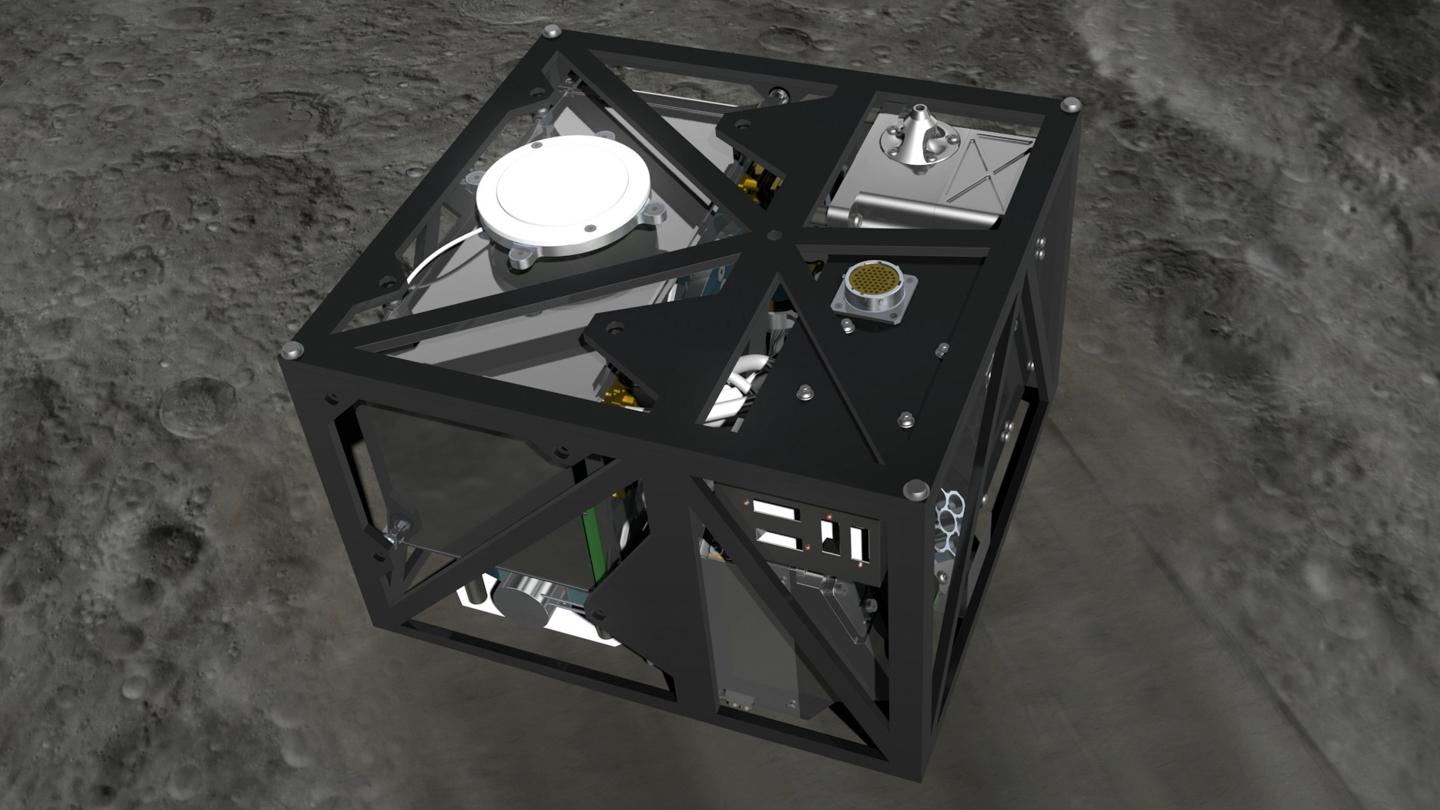
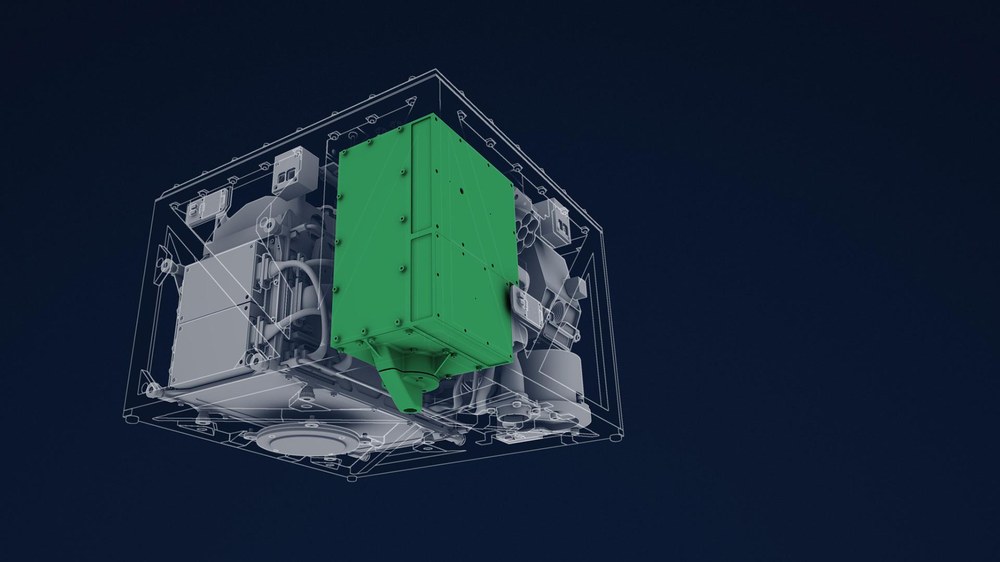
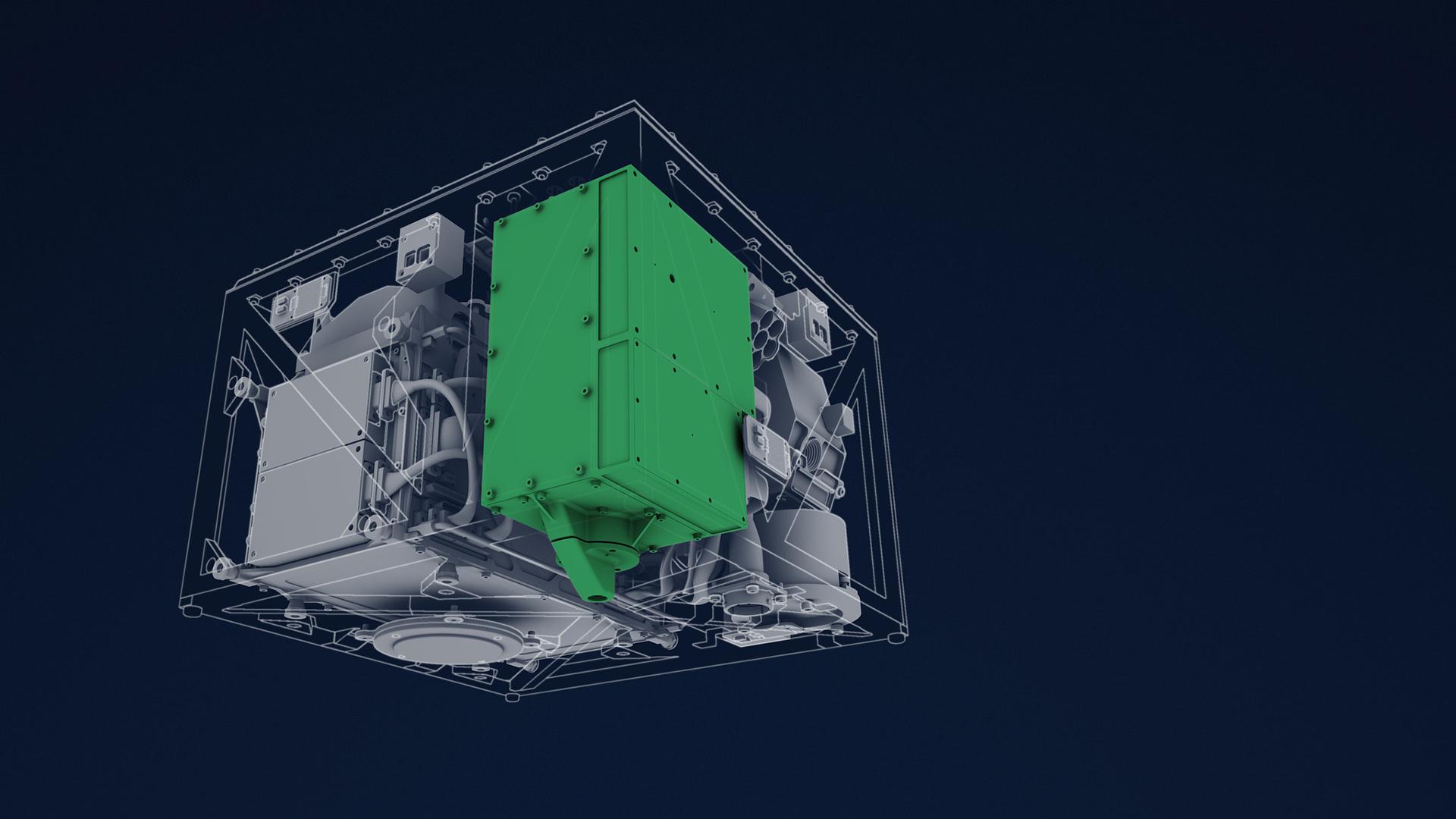
MASCOT (Mobile Asteroid Surface Scout) is a mobile box-shaped landing device measuring 30 x 30 x 20 centimetres and weighing approximately 10 kilograms. It accommodates four scientific instruments designed to study the surface of the asteroid Ryugu in detail.
The structure itself, weighing just 450 grams, is extremely light but very robust. This is made possible by the use of layers of carbon fibre reinforced plastics that are just 0.125 millimetres thick, and which are combined with a foam core or laminate to form a framework structure appropriate to the material.
MASCOT also includes a mechanism that enables movement on the asteroid surface. This encompasses a swing-arm, made out of tungsten, which is accelerated and decelerated by a motor, causing the whole system to swing, so that MASCOT can move by 'jumping' and thus manoeuvre itself into the position required to conduct the experiments. MASCOT's battery has a capacity of 200 Watt-hours, sufficient for 16 hours of operating time. In fact, MASCOT was in operation for over 17 hours collecting data from the asteroid surface. During this time, Ryugu went through about two full asteroid day-and-night cycles.
Landing and 'hopping' on an asteroid
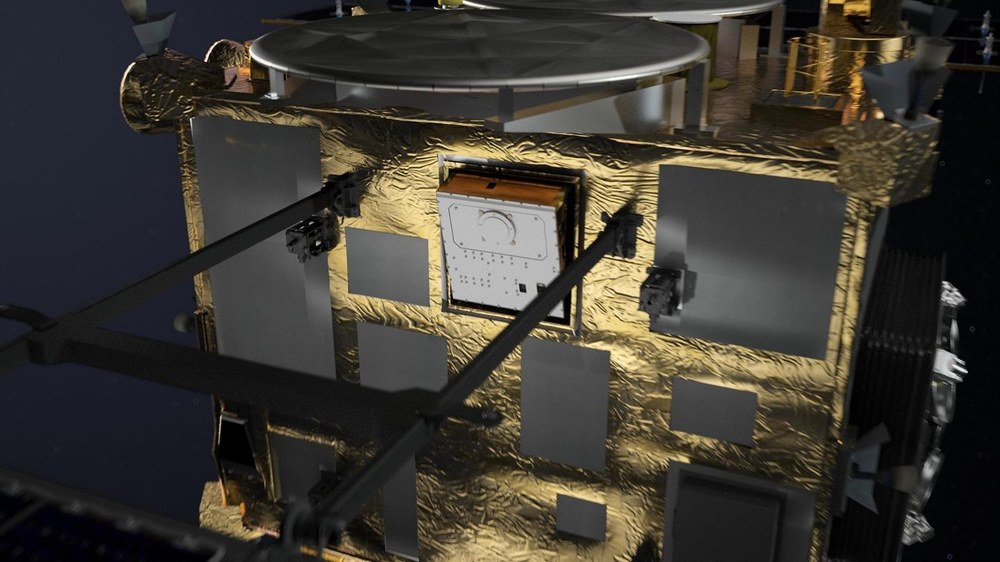
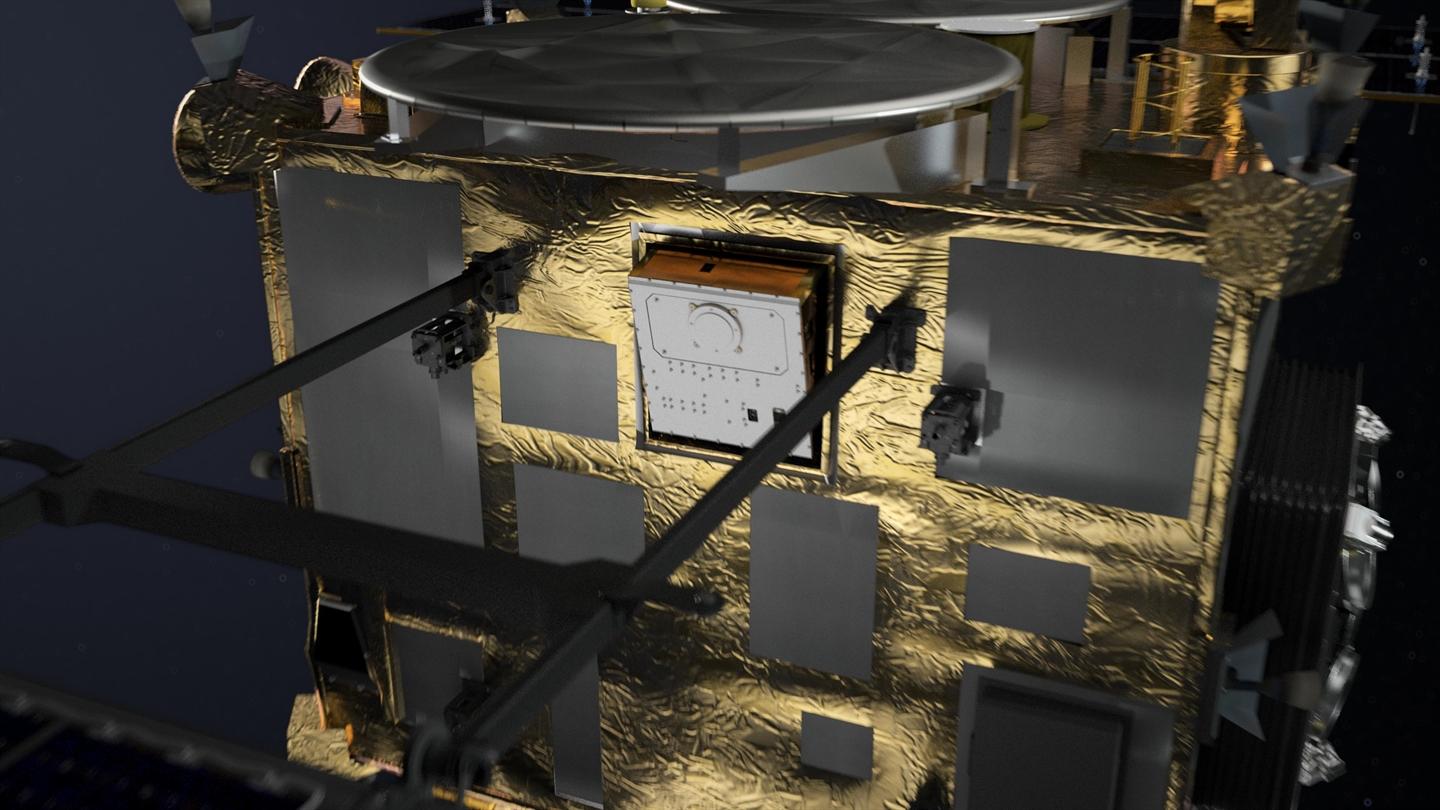
Since the asteroid‘s gravity was not strong enough to 'pull' MASCOT out of the Hayabusa2 probe, it was pushed out of its holding device by means of a spring mechanism behind a push-off plate. MASCOT then free-fell from a height of approximately 51 metres, at the falling speed of a sheet of paper, touching down on Ryugu approximately six minutes later. However, due to the low gravitational pull on the asteroid – Earth has about 60,000 times the amount – MASCOT bounced several times across the surface. The designated landing site MA9 (Alice's Wonderland) was hit exactly and is located at about 300 degrees east and 30 degrees south.
After another 31 minutes and several ground contacts, MASCOT reached its first resting position. It was day on the asteroid when the surface measurements began. At the DLR control centre in Cologne, it was discovered that MASCOT was lying on its back and thus could not carry out its planned experiments. Thus, it was necessary to send an 'uprighting' command to the lander. From Earth, a command was sent unscheduled to Hayabusa2 and from there to MASCOT to activate the swing arm to turn the lander into its intended position for the experiments. The manoeuvre was successful and MASCOT carried out its four experiments on schedule and automatically. The lander made a 'mini-move' to optimise the location of the experiment's sensors. Further scientific investigations took place. MASCOT hopped one more time and entered its 'End of Life' phase. Further scientific investigations could be carried out before contact with MASCOT broke off after a total of 17 hours and 7 minutes due to the onset of a radio shadow and the imminent night.
MASCOT's scientific payload
The MASCAM camera, developed by the DLR Institute of Planetary Research, started capturing images during the descent to Ryugu. After landing, it photographed the surrounding area from the landing site to the horizon in high resolution, and carried out geological and physical measurements of the surrounding environment and the subsoil from the asteroid's surface. The MARA radiometer of the DLR Institute of Planetary Research served to determine the surface temperature as well as the thermal properties of the regolith. The MicrOmega infrared spectrometer, a device from the Institut d‘Astrophysique Spatiale (Paris), investigated the mineralogical composition of the regolith. The MAG magnetometer, developed by the Institute for Geophysics and Extraterrestrial Physics at the Technical University of Braunschweig, determined the asteroid’s magnetic field.
Once the first measurements were conducted, MASCOT – again driven by the flywheel – changed location and repeated the experiments there. A third landing site was also planned for taking measurements. The data from MASCOT was transmitted to Hayabusa2. The probe was located in an observer position three kilometres above the asteroid. From there, all of MASCOT's measurements and operating data were transmitted to Earth.
The activities carried out from the beginning to the end of the MASCOT operating period were forwarded from the JAXA Control Centre in Sagamihara directly to the DLR Microgravity User Support Center (MUSC) in Cologne. Initial results from the experiments provided pointers for the Japanese mission management and MUSC for the selection of landing sites for future sample taking.
DLR institutes involved in the MASCOT lander
The DLR Institute of Space Systems in Bremen was responsible for developing and testing the lander together with CNES. The DLR Institute of Composite Structures and Adaptive Systems in Braunschweig was responsible for the stable structure of the lander. The DLR Robotics and Mechatronics Center in Oberpfaffenhofen developed the swing arm that allows MASCOT to hop on the asteroid. The DLR Institute of Planetary Research in Berlin contributed the MasCam camera and the MARA radiometer. The asteroid lander is monitored and operated from the MASCOT Control Center in the Microgravity User Support Center (MUSC) at the DLR site in Cologne.