Mars 2020 – a virtual visit to Jezero Crater


ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
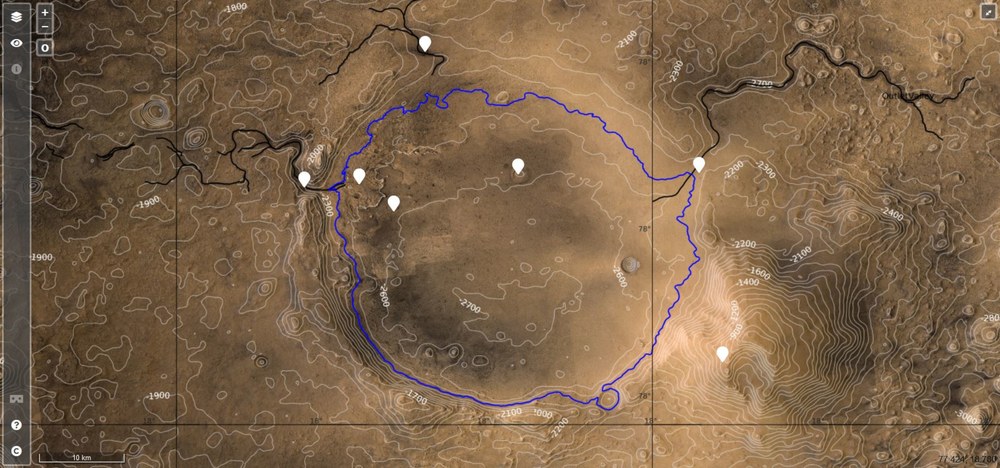
- An interactive map of the Mars 2020 landing site makes it possible to explore the Jezero crater and its surroundings
- Data from the High Resolution Stereo Camera (HRSC) on board Mars Express and the Mars Reconnaissance Orbiter (HiRISE) mission were used for the map.
- Focus: Space, planetary research
Today, on the evening of 18 February 2021, NASA's Mars 2020 mission will set down the rover 'Perseverance' in Jezero Crater at 21:55 (CET). With these image products, the landing site of the most powerful of all Mars rovers to date can be explored on screen. The interactive map of Jezero Crater was created by researchers at Freie Universität Berlin (FUB) using pre-processed data acquired by the High Resolution Stereo Camera (HRSC) operated by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR). Since January 2004, Mars researchers at the DLR Institute of Planetary Research in Berlin and FUB have been mapping Mars using stereo image data from HRSC, a camera system for imaging the surface of Mars in high resolution, in colour and in '3D'.
Various vantage points provide a panoramic view of the crater and its surroundings, as well as zooming in on scenic details down to centimetres. The 3D scenes can also be viewed in a virtual reality (VR) environment (VR equipment required). Loaded onto a mobile phone, the view of the crater can be controlled by the movements of the smartphone. Data from ESA's Mars Express (HRSC) mission and NASA's Mars Reconnaissance Orbiter with the HiRISE camera system were used for the virtual map. The spectacular visualisation was realised by scientists from the Department of Planetary Sciences and Remote Sensing at Freie Universität Berlin. The HRSC camera was developed at DLR, constructed together with German industry and is operated by the DLR Institute of Planetary Research.
NASA's Mars 2020 mission has been on its way to Mars since 30 July 2020. On board is the rover 'Perseverance', the most complex research system ever sent to Mars. In addition to numerous scientific instruments, it carries containers for the collection of drill cores that will be left behind on Mars for later transport to Earth as part of a follow-up mission planned for the 2030s. The vehicle, with a mass of around one tonne, will search for traces of past microbial life in Jezero Crater, collect and analyse samples, prepare them for transport to Earth with the follow-up missions and, for the first time in the history of space exploration, ascend a helicopter drone.
Jezero Crater – a very special place
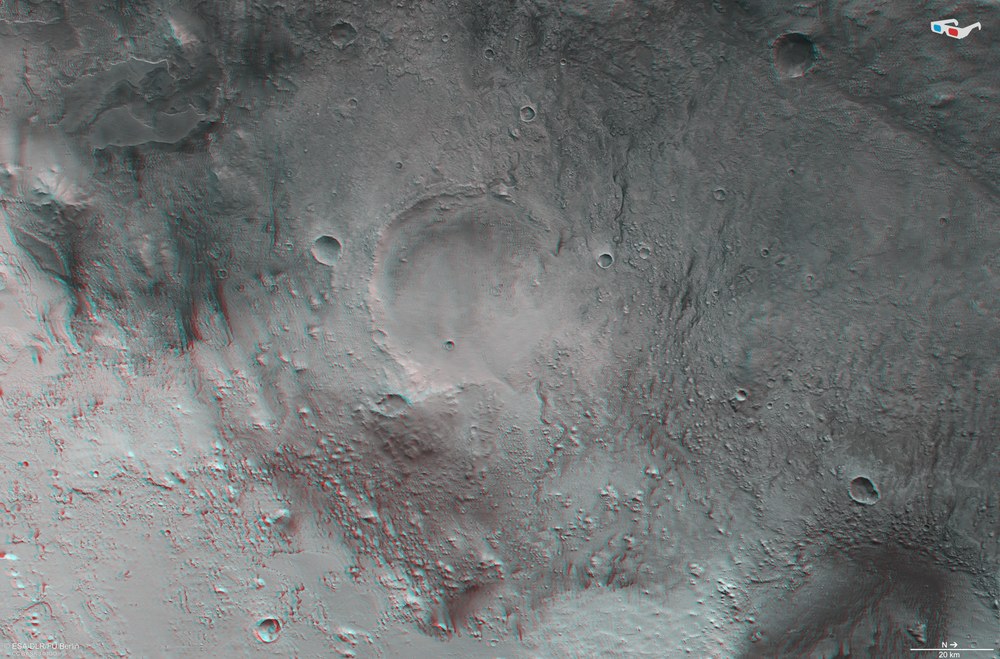
Jezero Crater was chosen as the landing site for good scientific reasons. Two ancient river deltas can be found inside the crater. Within the delta deposits, numerous water-bearing minerals have been found, indicating that liquid water was once present for an extended period of time. Jezero is a 49-kilometre-wide impact crater, bordering the 1250-kilometre Isidis impact basin that was formed 3.9 billion years ago. Jezero Crater is approximately the size of Paris. It once contained a lake that was fed by large regional watersheds.
In the virtual map, the two inlet channels, Neretva Vallis and Sava Vallis, can be seen; these break through the northern and northwestern crater rim (Viewpoints Inlet 1 and Inlet 2). These deltas were formed by sediments carried by flowing water (Delta viewpoint), as they also occur on Earth at the mouths of rivers such as the Nile or the Mississippi or on rivers such as the Lena. Here, water-containing clay minerals and carbonates (limestones), which are rare on Mars, have been discovered using spectroscopic satellite data. On Earth, the sediments deposited in deltas contain a high proportion of small, dead organisms and microorganisms. These sediments, which become more fine-grained with increasing distance from the inlet, have a high potential to preserve and maintain biosignatures over long periods of time. The former presence of water and the unusually large carbonate deposits for Mars make Jezero Crater a perfect target for the search for signs of past microbial life on Earth’s nearest neighbour.
The outflow channel Pliva Vallis breaks through the eastern crater rim overlooking a dune. Using altitude measurements from the crater rim, crater floor, dunes and the upper edge of the delta, the estimated depth of the lake can be deduced, resulting in a water depth of approximately 250 metres. However, since the deltas have been heavily eroded since the end of water activity about 3.8 billion years ago, only an approximate estimate of the lake water volume is possible. In addition, the crater was filled in about 300 million years later with powerful lava flows from the nearby Syrtis Major volcanic region.
The Mountain View viewpoint offers a perfect vista into the crater. This viewpoint is located on top of the large hill southeast of the crater. From here, the observer can see that the northern part of the crater floor is sloping and that the northern crater rim is clearly less defined, compared to the flat, smooth crater floor in the south and the much steeper southern crater rim flanks. This appearance originates from the erosion of material in the catchment areas to the north of the crater, which was then transported into the crater basin itself and deposited in the deltas. Also contributing to the asymmetrical topography is the erosion of the northern crater rim, caused by the river valleys breaking through the flank of Jezero Crater.
- Data processing
A variety of image data from the Mars Express (MEX) and Mars Reconnaissance Orbiter (MRO) missions were used to create the interactive map of the rover landing site in Jezero Crater. The HRSC map product HMC30, produced by the Global Topography and Mosaic Generation Task Group (GTMTG) of the HRSC science team, serves as the reference dataset for all other datasets. The original HMC30 map sheets can be downloaded here and viewed in an interactive map environment here and thry can also be downloaded. A series of higher resolution image data from the Context Camera (CTX) on board MRO were integrated into the base map. A total of 33 CTX strips with an average resolution of six metres per pixel were orthorectified (motion- and terrain-related geometric distortions were removed from the raw data) and aligned with the HRSC data through process adjustments, using the USGS Integrated Software for Imagers and Spectrometers (ISIS). After this geometric alignment, the CTX images were radiometrically normalised using the HRSC greyscale mosaic as a brightness reference. The colour information was transferred from the HRSC image mosaic, which has a resolution of 50 metres per pixel, to the high-resolution CTX data. The existing HiRISE image mosaic with an even higher resolution of half-a-metre per pixel, created for the rover by the USGS Astrogeology Science Center as part of the Terrain Relative Navigation (TRN) project, has already been very well aligned with the HRSC baseline dataset. The HRSC colour was also applied to the otherwise greyscale HiRISE dataset using pan-sharpening. The DTM base map was combined from the HMC30 map sheet and the existing HiRISE DTM mosaic from the TRN project. The HiRISE DTM mosaic is available here.
- The HRSC experiment on Mars Express
The High Resolution Stereo Camera was developed at the German Aerospace Center (DLR) and built in collaboration with partners in industry (EADS Astrium, Lewicki Microelectronic GmbH and Jena-Optronik GmbH). The science team, which is headed by Principal Investigator (PI) Thomas Roatsch, consists of 50 co-investigators from 35 institutions and 11 nations. The camera is operated by the DLR Institute of Planetary Research in Berlin-Adlershof.
Related links
Related articles
- An in-depth look at the geological context of the Mars 2020 landing site through the eyes of DLR's HRSC instrument
- Precision landing on Mars on 18 February – transmitting images and sound
- The topography of Jezero crater – landing site of NASA's Mars 2020 mission
- DLR’s High Resolution Stereo Camera ‘flies’ over a future Mars landing site – Jezero Crater
- HRSC - High Resolution Stereo Camera