
FOSTER²NAV
Context
The goal of the FOSTER²NAV project was to develop and test a flash lidar sensor capable of supporting the GNC systems of exploration missions. A flash lidar is able to measure 3D images in a much wider range of distances than classic stereo cameras. Applications for such a sensor are e.g. the evaluation of the landing area or during rendezvous and docking maneuvers.
FOSTER²NAV began in 2010 and ended successfully in mid 2014. The partners in this EU-funded FP7 project were CSEM, VTT, Modulight and Airbus. The project’s homepage can be found here.
The DLR Institute of Space Systems was responsible for the dynamic testing on short-range indoor tests and long-range outdoor tests. The goal of the tests was to verify the functionality and performance of the flash lidar.
Test Concept and Activities
The flash lidar was tested at three test sites: TRON, an airfield and EPOS. The high level approach was:
- to position or to move the sensor with respect to a target under various conditions
such as varying speed, distance or target geometry - to record synchronized sensor measurements and ground truth measurements during the test
- to analyze the sensor and ground truth data for verifying the functionality and performance of the flash lidar
The main activities during the preparation of the tests included:
- Test concept development and test procedure definition
- Development of laser safety regulations
- Design of targets with different albedo and geometry
- Alignment between the flash lidar and the lab components
- Development of a ground truth generation workflow:
- Development of the synchronization between measurement data and ground truth data
Indoor Tests in TRON
TRON was the first of the three test sites. The laboratory environment was best suited for the beginning of the test campaign, for commissioning the sensor and getting hands-on feeling. Furthermore, in TRON the focus was set on acquiring high precision (about 1 mm) ground truth data. By analyzing sensor data and ground truth data the sensor parameters of bias and noise could be determined.
The flash lidar was tested under the following parameters:
- distance to target: 1-10 m
- velocity relative to target: 0.2 – 1.4 m/s
- different target albedo values using black and white fabric
- different target geometry: planar, and planar + installed primitive solids
Outdoor Tests at Airfield
Complementary to our indoor activities the sensor was also tested outdoors. The goal was to test the flash lidar under higher speed and longer range relative to the target compared to what could be realized in TRON. Due to the high laser optical power involved the tests were conducted on the military airfield in Fassberg, Germany.
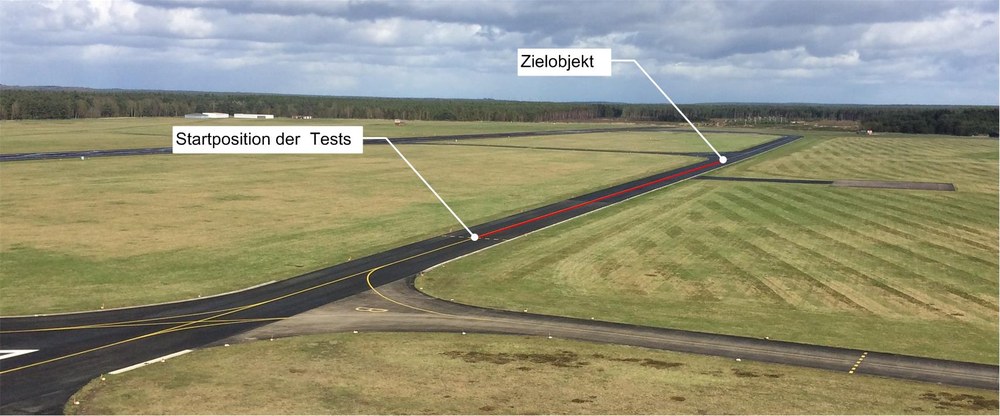

The sensor target was a 3 m x 3 m plane, equipped with primitive bodies. For mobility, the sensor was installed on the test-car including a battery-based power supply. As in TRON, also for the outdoor tests ground truth data was recorded. For doing so, a navigation system was developed with a mobile part installed on the car and a stationary part located near the target.
The navigation system comprised:
- a mobile part with
- a stationary part with
In Fassberg, the sensor was tested under the following parameters:
- distance to target: 10 m – 200 m
- speed relative to target: up to 23 m/s
- target albedo: white fabric
- target geometry: primitive bodies installed on plain target
