
ATON – Autonomous Terrain-Based Optical Navigation
Motivation
Future space exploration missions envisage feats ranging from in-orbit rendezvous and docking to precise and safe landing on planetary bodies. These missions will not only take place in the vicinity of Earth and Moon but also stretch out several astronomical units to targets like Mars, asteroids, or the icy moons of Jupiter and Saturn. A reliable execution of such maneuvers can only be achieved by autonomous spacecraft using the target body as a navigation reference. Optical navigation methods are seen as a promising tool for realizing this approach. Not surprisingly highly detailed information about the mission target is required. One major class of data providing such information encompasses the results of modern mapping missions, which provide high-quality, high-resolution, global geo-referenced maps, necessary for e.g. precise navigation. A second class comprises data acquired during the mission, for that an obvious application is gathering the live-information necessary to refer to on-board maps for determining the spacecraft’s current position. Another frequent application is building a high-resolution map of the landing site based on real-time 3D measurements of the underlying surface, taken during the final approach.
In any case, this introduces the need for significantly improved online processing capabilities as well as for novel algorithms and optical sensors.
A collaboration of the GNC systems department and other DLR institutes is developing a navigation system which integrates inertial sensors with novel optical navigation sensors. The vision is to develop a navigation system enabling the autonomous, precise and safe landing on the Moon.
Overview
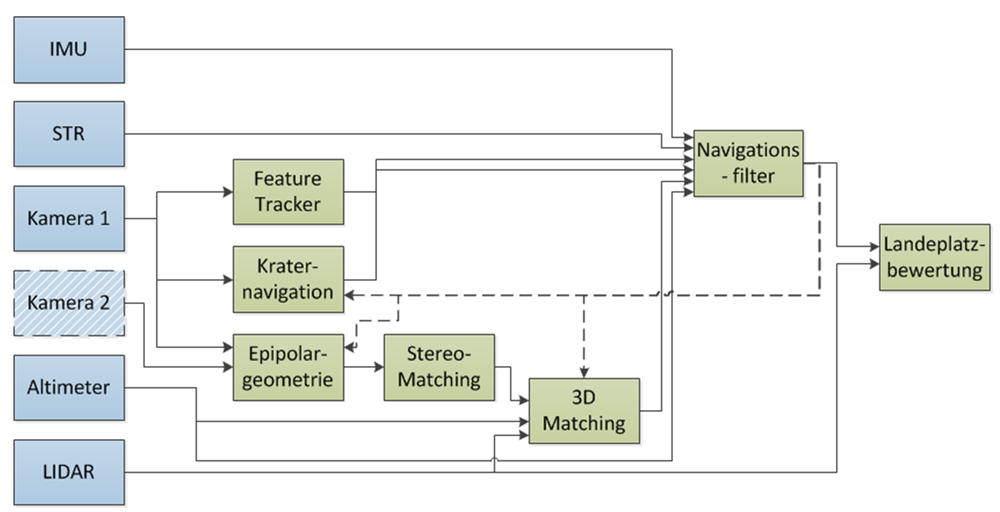
The sensor suite comprises an IMU, star tracker, cameras, altimeter and a flash lidar, generating inputs for algorithms such as sensor data fusion, crater navigation, feature tracking and stereo data generation or landing site evaluation.

Project goals:
- Implementation of the navigation software on a real-time system
- Integration of IMU, cameras and laser scanners with the real-time system
- Verification of the performance of the complete GNC system (software + sensors) during helicopter flights
- Miniaturization of system components and optimization of software for space hardware
Milestones achieved
- 2017 Closed-loop helicopter drone flight with the ATON navigation solution fed back into a guidance and control computer, providing a safe descent trajectory until right before landing
- 2016 Helicopter open-loop flight with onboard operation of the integrated ATON navigation computer and sensor suite with real time computation of a navigation solution
- 2015 First data recording flight of the ATON navigation system onboard a helicopter drone
- 2013 Open- and Closed-loop test of ATON navigation algorithms suite in TRON laboratory with industrial cameras and Lunar terrain models
- 2012 Completion of the real time-capable navigation software framework and demonstration of critical functionality with simulated sensors
- 2011 Completion of trajectory, environment and sensor simulation frameworks

Outlook
After the successful demonstration of the integrated system during the flight test campaigns, the next project goals are the optimization of algorithms with regards to flight software requirements as well as the layout of breadboards suitable for space operations qualification.