
Tomographic Particle Imaging Velocimetry (Tomo-PIV)
Bei der Methode des tomographischen PIV handelt es sich um eine relativ neue Erweiterung der PIV-Messtechnik mit der Fähigkeit, dreidimensionale Geschwindigkeitsvektorfelder zu bestimmen [1]. Wie beim planaren PIV basiert diese auf dem Prinzip der Berechnung des Geschwindigkeitsfeldes einer Strömung aus dem Versatz von abgebildeten Streupartikeln (sog. Seeding) in zwei aufeinander folgenden Aufnahmen des Untersuchungsgebietes. Mittels eines planaren Stereo-PIV-Aufbaus ist es möglich, die momentanen Geschwindigkeitsvektoren mit allen drei Komponenten in einer zweidimensionalen Ebene zu ermitteln (2D-3C). Tomo-PIV ermöglicht es nun darüber hinaus, ein momentanes dreidimensionales Geschwindigkeitsvektorfeld in einem Volumen zu bestimmen (3D-3C).
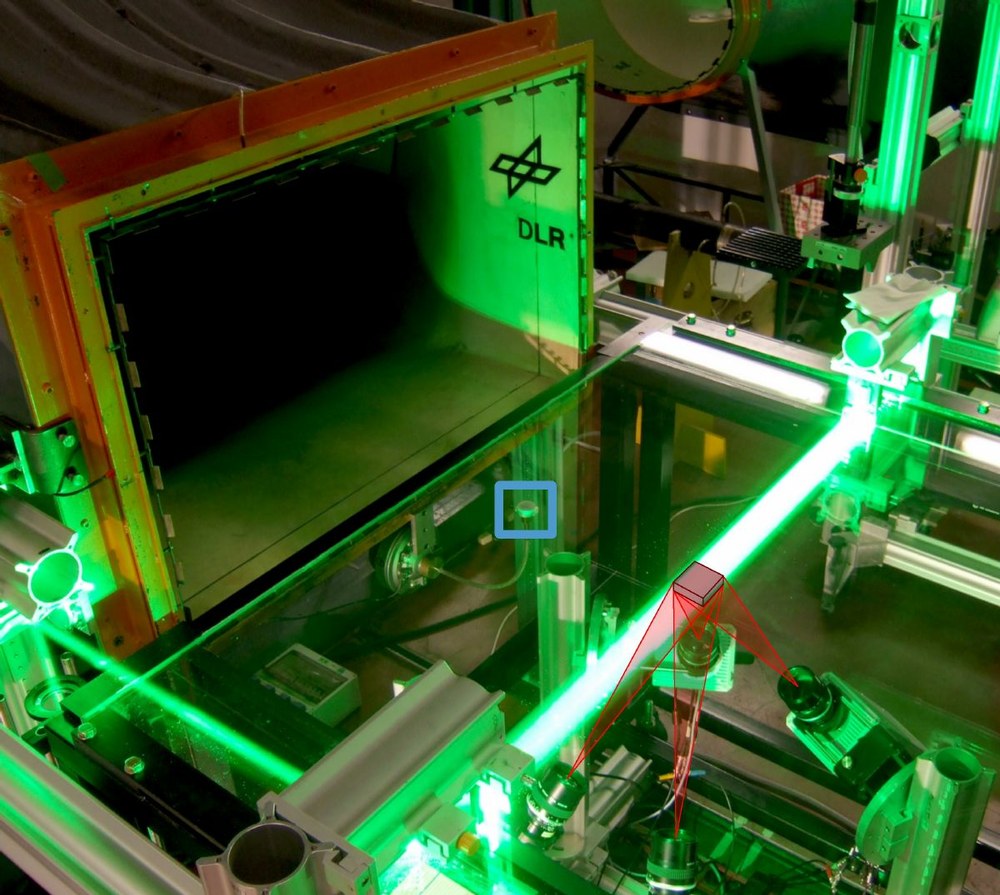
Das Verfahren bedient sich dabei der tomographischen Rekonstruktion einer momentanen Teilchenverteilung aus den Projektionen dieser Verteilung auf mehrere Kameras: Die interessierende Strömung wird mit winzigen Streupartikeln versetzt. Nun wird das Untersuchungsgebiet durch einen Volumenlichtschnitt mit rechteckiger Grundfläche mit einem kurzen Laser-Lichtpuls beleuchtet. Das an den Partikeln gestreute Licht wird durch mehrere (ca. 3 bis 6, typischerweise 4) Kameras unter Einhaltung der Scheimpflugbedingung aufgenommen, wodurch man gewichtete Projektionen der momentanen Teilchenverteilung aus verschiedenen Richtungen erhält (siehe Abb. 1 [3]). Die Information über die Sichtlinien der einzelnen Kamerapixel im untersuchten Volumen wird mit einer Polynomapproximation beschrieben, die aus einem 3D-Kalibrierverfahren ermittelt wird.
Nun muss aus den Projektionen auf die Kameras die ursprüngliche dreidimensionale Teilchenverteilung (zurück-) berechnet werden. Dazu bedient man sich des Verfahrens der MART (Multiplicative Algebraic Reconstruction Technique), wie es von Herman und Lent eingeführt wurde [2]. Hierbei wird das Rekonstruktionsproblem auf ein unterbestimmtes Gleichungssystem zurückgeführt, welches sich durch algebraische Methoden näherungsweise lösen lässt. Am Ende dieses Rekonstruktionsprozesses erhält man eine digitale Repräsentation des Volumens in Form eines sog. Voxelraumes (abgeleitet von Pixel = picture elements -> volume elements), dessen Intensitätswerte virtuell die ursprüngliche Partikelverteilung annähernd darstellen.
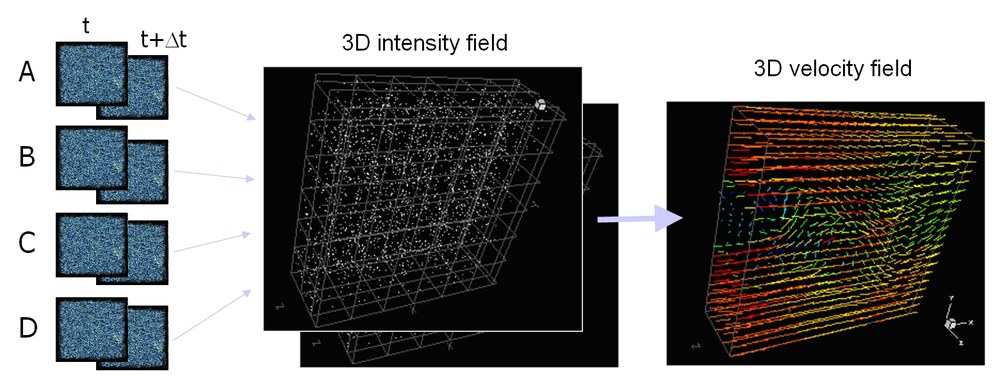
Die Beleuchtung und Aufnahme des Volumens in der Strömung erfolgt zweimal zu kurz aufeinander folgenden Zeitpunkten; eine tomographische Rekonstruktion wird für beide Zeitpunkte durchgeführt. Nun kann mittels der lokalen dreidimensionalen Kreuzkorrelation der beiden erhaltenen Voxelräume das Verschiebungsvektorfeld der rekonstruierten Partikelverteilungen auf einem regelmäßigen Gitter analog zur 2D-PIV-Auswertung berechnet werden. Ein zusammenfassendes Schaubild der Tomo-PIV-Methode findet sich in Abb. 2 (nach F. Scarano, TU Delft).
Anwendungen
Tomo-PIV kann sowohl in Luft, wie auch in Wasser eingesetzt werden. Genau wie bei planarem PIV lassen sich zeitaufgelöste Experimente durch den Einsatz von Hochgeschwindigkeits-Kameras und –Lasern durchführen (z.B. turbulente Grenzschichtströmungen). Die Strömungsstrukturverteilungen können z.B. durch ausgesuchte Vektorebenen und 3D-Iso-Konturflächen der Wirbelstärke wiedergegeben werden.
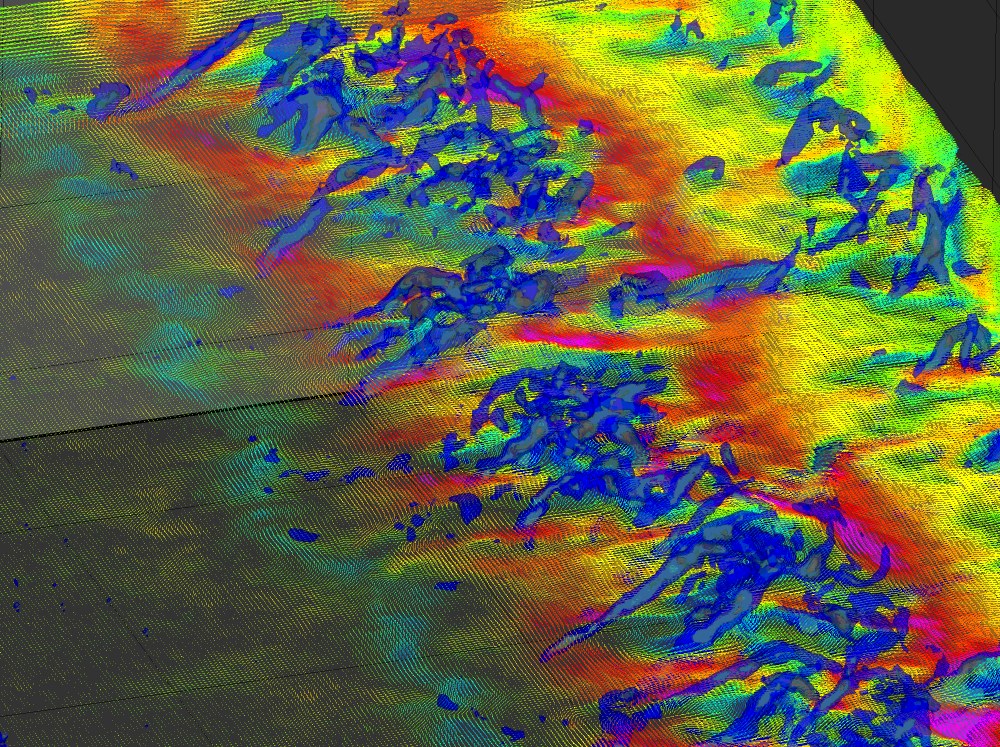
Ist eine zeitaufgelöste Messung nicht erforderlich oder eine höhere Auflösung der Strömungsstrukturen von Interesse, lassen sich durch die Verwendung von hochauflösenden Doppelbild-Kameras momentane Geschwindigkeitsverteilungen erfassen, die mehrere Größenskalen in einer komplexen Strömung gleichzeitig enthalten können. Abb. 3 zeigt ein Ergebnis aus einem Experiment, bei dem vier 16-Megapixel-Kameras zur Aufnahme eines 100 x 70 x 8 mm³ großen Volumens in der transitionellen Scherströmung hinter einer rückwärts-gewandten Stufe (Backward-Facing-Step) verwendet wurden. Hier konnten Vektorfelder mit einer Auflösung von knapp 1,1 unabhängigen Vektoren pro mm³ (bei 75 % Überlappung der lokalen Auswertevolumina insgesamt mehr als 3,5 Millionen Vektoren pro Messpunkt) realisiert werden.
Die zukünftige Anwendung von Tomo-PIV in industriellen Windkanälen wird sich aufgrund der größeren Beobachtungsentfernungen unter dem zusätzlichen Einfluss der Vibrationen von Kameras wohl zunächst auf sogenanntes Fat-Sheet Tomo-PIV beschränken, bei der sich die Fehler der Sichtlinienvariationen zwischen den Kameras durch Selbstkalibration [4] von Bild zu Bild korrigieren lassen. Hierbei ist der Lichtschnitt nur wenig breiter als bei der Stereo-PIV-Technik, wobei allerdings bei der Fat-Sheet Tomo-PIV der vollständige momentane Geschwindigkeitsgradiententensor in dieser „dicken Ebene“ erfasst werden kann.
Literatur
[1] Elsinga G.E., Scarano F., Wieneke B. and van Oudheusden B.W. (2006); Tomographic particle image velocimetry. Exp Fluids 41:933-947(15)
[2] Herman G.T., Lent A.; Iterative reconstruction algorithms. Comput Biol Med 6:273–294, 1976
[3] Schröder A., Geisler R., Elsinga G.E., Scarano F., Dierksheide U. (2008); Investigation of a turbulent spot and a tripped turbulent boundary layer flow using time-resolved tomographic PIV. Exp Fluids 44:305–316
[4] Wieneke B. (2008); Volume self-calibration for 3D particle image velocimetry. 549-556, Exp Fluids 45:549–556