Flattern ist eine Form der aeroelastischen Instabilität, die sich durch Schwingungen (siehe Abbildung 1) äußert, die entweder zunehmen und schließlich zum Versagen der Struktur führen oder bei einer konstanten Amplitude verbleiben und Ermüdungsprobleme verursachen. Aufgrund der sicherheitsrelevanten Auswirkungen dieses Phänomens muss eine Flatterfreiheit bei der Konstruktion gewährleistet sein. Heutzutage wird dies durch numerische Rechenverfahren vorab geprüft und sollte ein Flugzeugdesign eine Neigung zum Flattern zeigen, muss er verändert werden. Das Ergebnis wäre ein schwerer, weniger optimaler Flugzeug. Ein besserer Ansatz ist der Einsatz aktiver Technologien, um die Steuerfächen des Flugzeugs so auszulenken, dass die Schwingungen effektiv gedämpft werden. Dieses Konzept wird als aktive Flatterunterdrückung (englisch: Active Flutter Suppression AFS) bezeichnet. Es stellt sich jedoch die Frage, ob diese Technologie sicher auf jede Art von flatternden Flugzeugen angewendet werden kann?
Eine Analogie durch das Problem des umgekehrten Pendels
Das scheinbar einfache Problem des umgekehrten Pendels weist viele Gemeinsamkeiten mit dem Problem der Flatterunterdrückung auf und bietet einen entscheidenden Vorteil: Sie, der Leser, können es selbst ausprobieren! Zur Veranschaulichung: Es ist relativ einfach, einen langen Stock in der Hand zu balancieren, während es bei einem kurzen Stock schwierig und bei einem sehr kurzen sogar unmöglich ist. Die Erklärung liegt in der Tatsache, dass je kürzer der Stock ist, desto größer ist sein instabiler Pol, d.h. der kurze Stock wird instabiler. Je instabiler das zu steuernde System ist, desto schneller muss die stabilisierende Aktion ausgeführt werden. Der menschliche Körper hat jedoch viele Einschränkungen, die mit der Wahrnehmung und der Betätigung der Gliedmaßen zusammenhängen. Daher können instabile Stöcke nicht ausbalanciert werden [1].
Analog zu unseren Gliedmaßen haben auch die elektrohydraulischen Aktuatoren, die die Flügelklappen auslenken, eine begrenzte Stellgeschwindigkeit und Amplitude. Wenn das Flugzeug also sehr instabil ist, kann das Flattern nicht kontrolliert werden. Und wenn eine Böe den Stock aus unserem Experiment stark neigt, ist es schwierig, ihn wieder in die senkrechte Position zu bringen. Es gibt nur eine begrenzte Anzahl von Winkeln, oder "Zuständen", innerhalb derer eine Stabilisierung möglich ist. In ähnlicher Weise können Flugzeuge unter turbulenten Bedingungen nur innerhalb einer begrenzten Anzahl von Zuständen stabilisiert werden, da die Stellgeschwindigkeit der Aktuatoren begrenzt ist. Die Identifizierung dieser Zustände ist entscheidend für die Beurteilung eines sicheren Betriebs des Flugzeugs.
Der regelbare Bereich, eine unüberwindbare Grenze
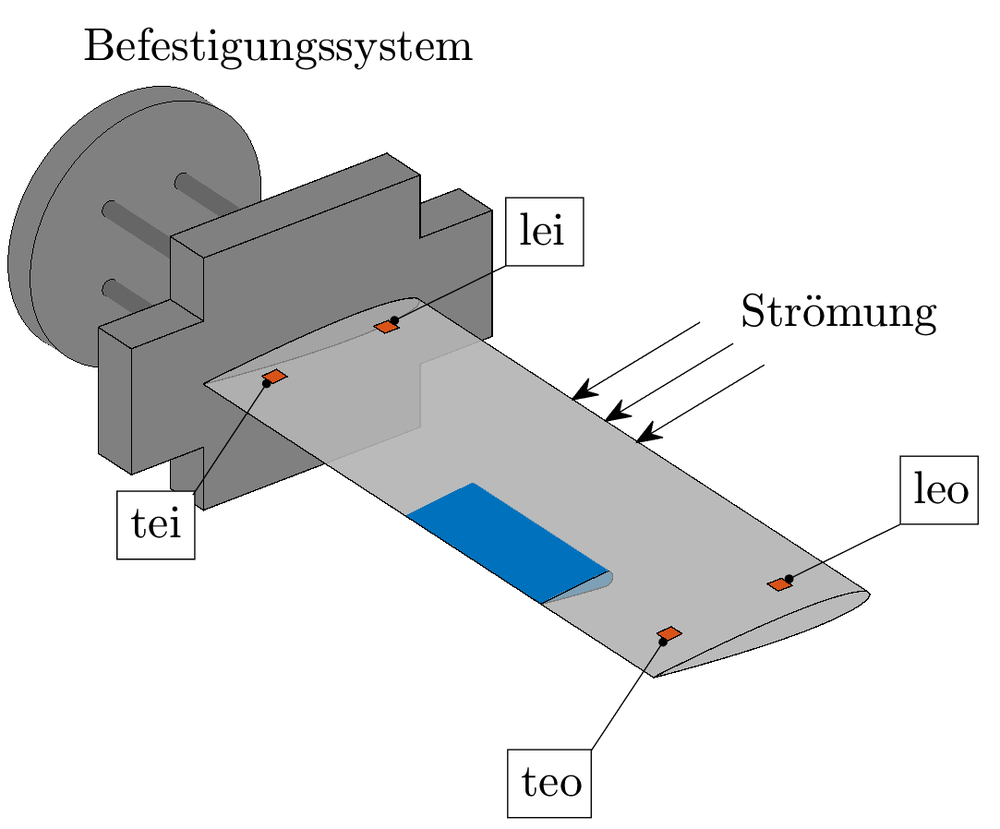
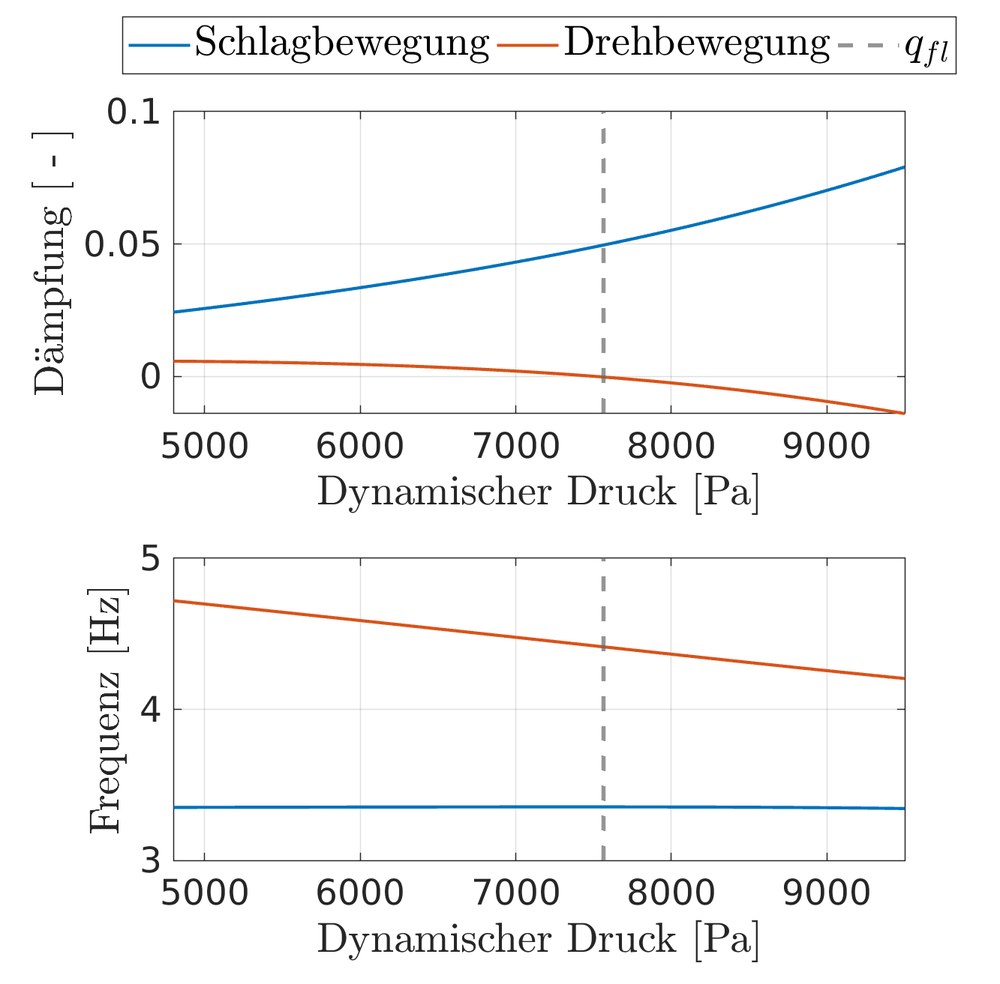
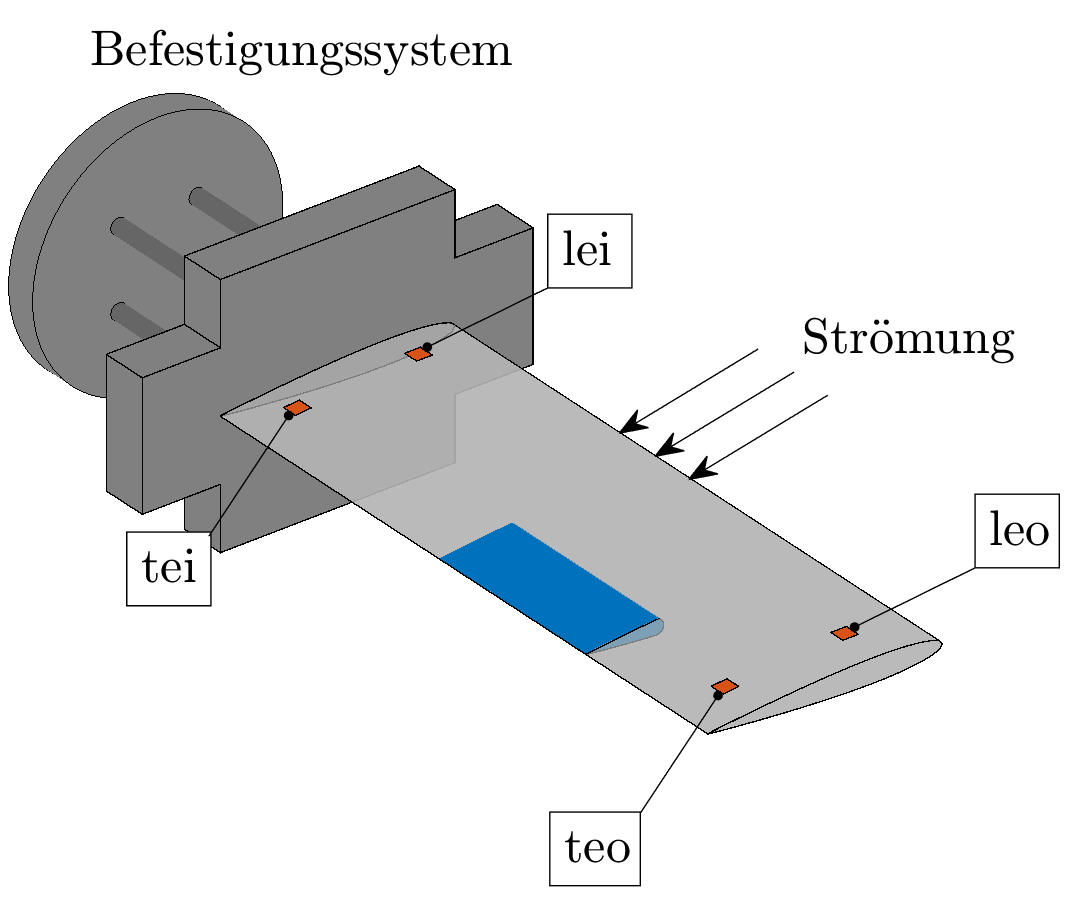
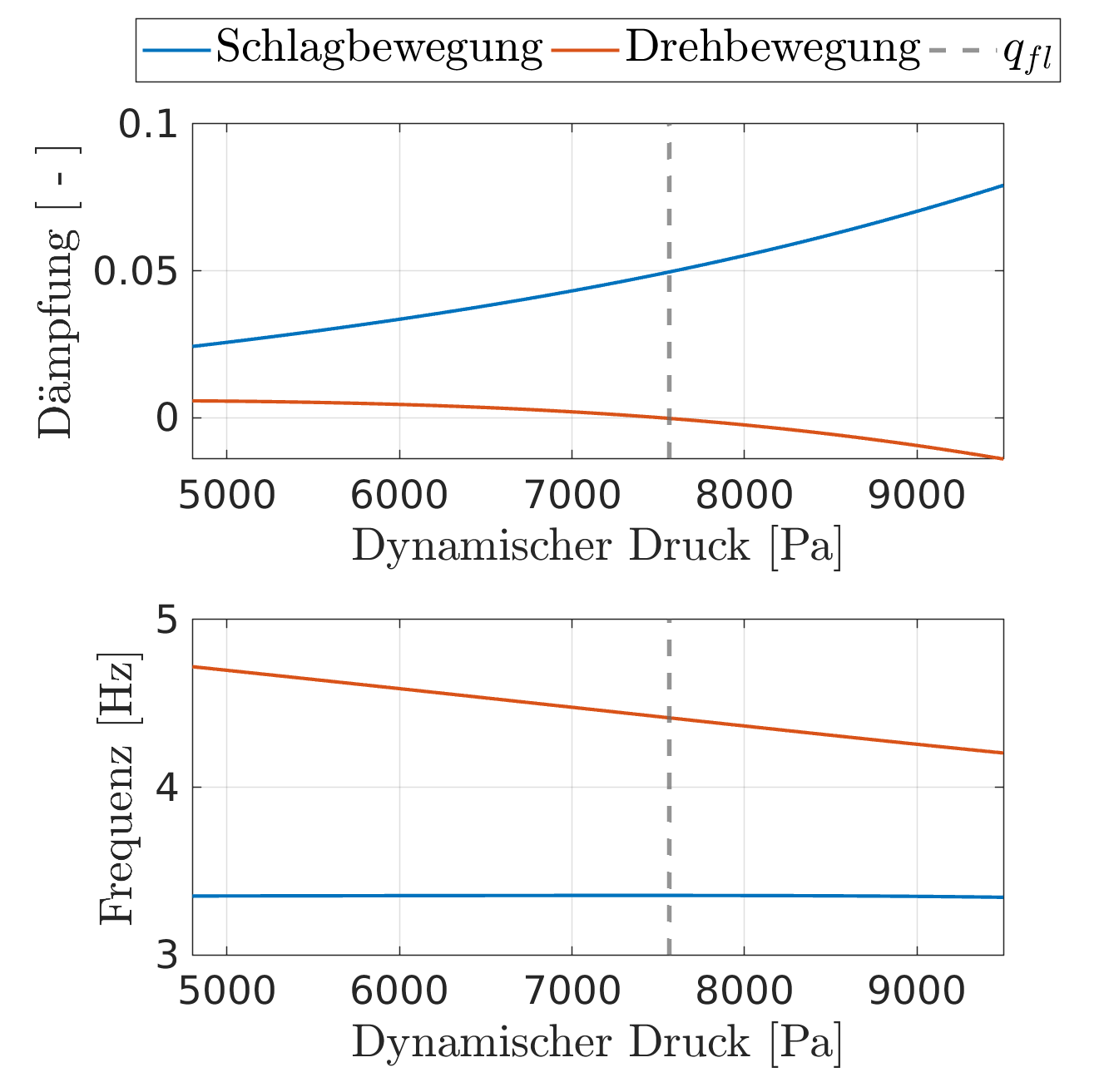
Die Menge der Zustände, in denen es möglich ist, eine Regelungsaufgabe unter Berücksichtigung der Eingabebeschränkungen durchzuführen, wird als regelbarer Bereich C [2] bezeichnet. Dieser Bereich ist eine Funktion der dynamischen Reaktion des aeroelastischen Systems sowie der Leistung der Aktuatoren, die zur Steuerung der Flügelklappen eingesetzt werden, die die stabilisierende Wirkung haben. Ein Algorithmus für die Charakterisierung von C wurde in [3] entwickelt und anhand eines numerischen Benchmarks der NASA, dem sogenannten BACT-Flügel [4], demonstriert. Der BACT-Flügel ist auf einem Trägersystem montiert, das es dem Flügel ermöglicht, zu schlagen und zu nicken. Abbildung 2 zeigt den Flügel, während Abbildung 3 die Entwicklung seines aeroelastischen Verhaltens mit zunehmendem dynamischen Druck zeigt, der als Maß für die Fluggeschwindigkeit angesehen werden kann, wenn sich die Dichte der Luft nicht ändert.
Abbildung 2: Darstellung des BACT-Flügels mit dem Trägersystem sowie den Standorten der Beschleunigungssensoren (rot) und der Hinterkantenklappe (blau) für die Flattersteuerung
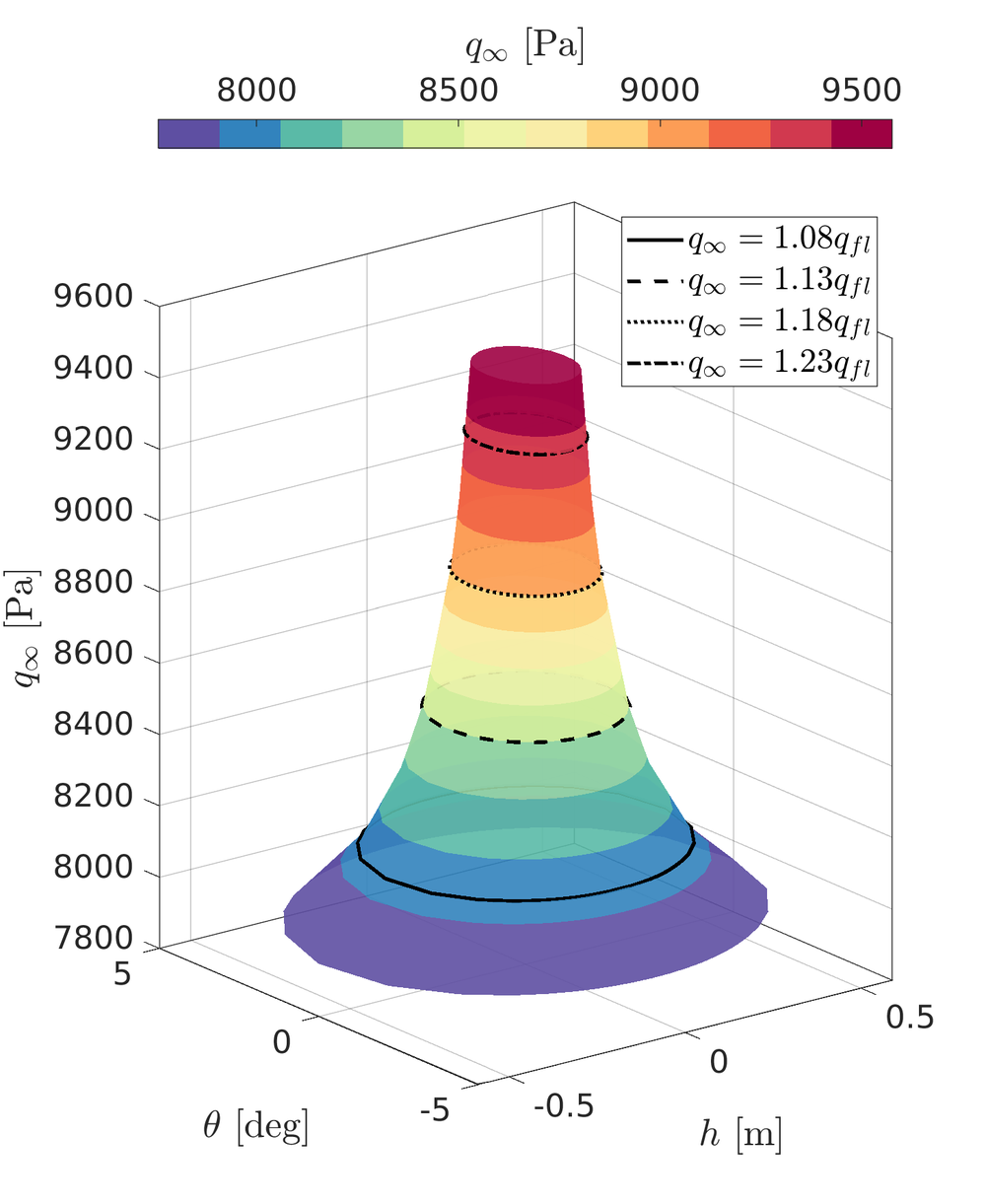
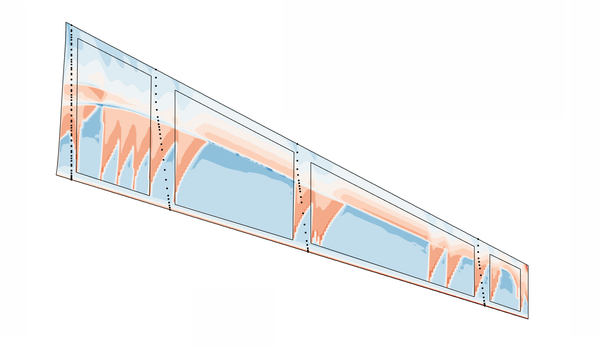
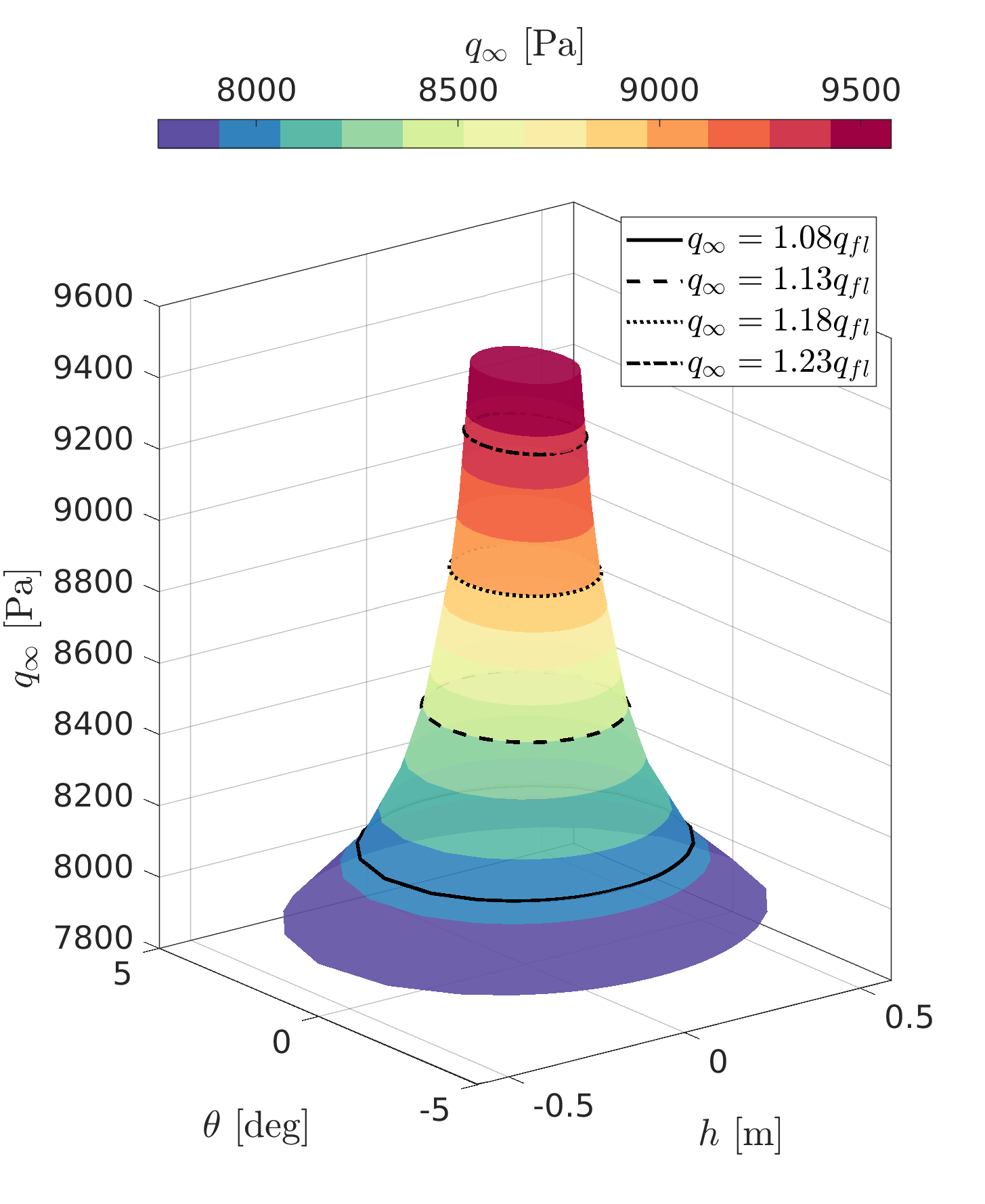
Insbesondere wird der Flügel mit zunehmendem dynamischen Druck immer instabiler (siehe Drehbewegung, deren Dämpfung immer negativer wird). Unter der Annahme einer maximalen Auslenkung der Klappe von 10 Grad und einer maximalen Stellgeschwindigkeit von 50 Grad/s wird der Algorithmus verwendet, um die Entwicklung von C über qfl hinaus zu berechnen. Die Ergebnisse sind in Abbildung 4 für die Schlagbewegung mit der vertikalen Auslenkung h und die Drehbewegung mit dem Nickwinkel Theta dargestellt. Die Abbildung zeigt deutlich, wie die Größe von C mit zunehmendem dynamischen Druck sinkt, was auf die zunehmende Instabilität des Systems zurückzuführen ist. Bei 15% über dem dynamischen Flatterdruck erlaubt der regelbare Bereich noch eine maximale Nickbewegung von etwa 2 Grad. Das bedeutet, dass bei einer Störung, die zu einem Nickwinkel Theta von mehr als 2 Grad führt, kein ausgeklügelter Regler in der Lage wäre, den Flügel zu stabilisieren. Die Schwingungen würden dann ins Unendliche wachsen.
Es wird deutlich, dass der maximale Wert des erreichbaren dynamischen Drucks bei aktiver Servoschleife (bestehend aus Sensoren, Regler zur Flatterunterdrückung und Aktuatoren) von Entwurfsentscheidungen und Sicherheitsüberlegungen abhängt. Diese Faktoren müssen die Entwicklung von C berücksichtigen. Ein umfassendes Beispiel zur Veranschaulichung ist in [3] beschrieben.
Abbildung 4: Entwicklung des Querschnitts des steuerbaren Bereichs C(h,θ) des BACT-Flügels über q_fl hinaus


{kind=link}
{kind=link}
{kind=link}
{kind=link}