Das Auftreten von gefährlichen Flattervorgängen an elastischen Flugzeugkomponenten führt in der Regel zu Zerstörung und Verlust der Luftfahrzeuge. Ein aeroelastischer Stabilitätsverlust kann durch das Verschieben möglicher Flatterpunkte zu höheren Geschwindigkeiten außerhalb der Flugenveloppe vermieden werden. Neben konstruktiven passiven Maßnahmen kann die Integration von aktiven Komponenten wie Sensoren, Reglern und Aktuatoren in den Flügelentwurf der gezielten Flattervermeidung dienen. Die numerische Untersuchung des Stabilitätsverhaltens erfordert dann eine Einbeziehung der Regelkreise in die aero-servoelastischen (ASE) Modelle und die Durchführung der Flatterrechnungen als closed-loop Simulationen.
Aktive Regelung im Flugzeugentwurf
In vielen Bereichen der Luftfahrt wird mit Hilfe von Regelsystemen das dynamische Verhalten von Luftfahrzeugen aktiv beeinflusst. So sind in der Flugmechanik die automatischen Flugregelsysteme zur Stabilisierung und Steuerung der Flugbewegung weit verbreitet. Ein anderes Feld zum Einsatz von Regelsystemen sind Vorrichtungen zur Lastabminderung bei Manöver- oder Böenbelastung. Hier soll ein Vorgehen zur Unterdrückung von aeroelastischen Instabilitäten gezeigt werden, mit dem auftretende Flatterfälle durch geregelte Klappenausschläge zu höheren Fluggeschwindigkeiten außerhalb der Flugenveloppe verschoben werden.
Das Anliegen dieser Untersuchung ist es, eine Regelumgebung aufzubauen, mit Hilfe derer die Strukturverformung eines hochelastischen, angeströmten Flügels aktiv beeinflusst und Flatterstabilität hergestellt werden kann. Zu diesem Zweck müssen in den Systementwurf Sensoren, Regler und Aktuatoren eingeführt werden, die zum Aufbau geschlossener Regelstrecken führen und das Lösen aero-servoelastischer Simulationsmodelle notwendig machen.
Hinterkantenklappen zur Flügelregelung
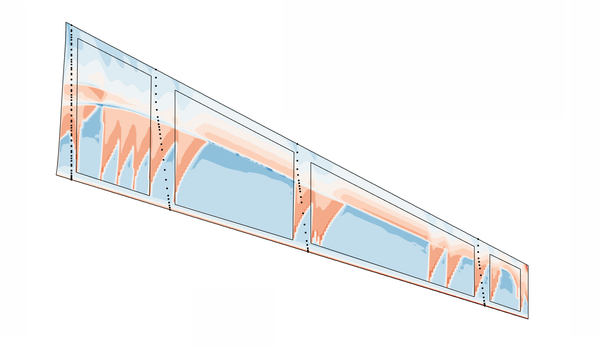
Mit dem Ziel, unterschiedliche Flatterfälle für die aero-servoelastische Untersuchung bereitzustellen, wurde das generische Modell als ein gepfeilter Fünf-Klappen-Flügel aufgebaut. Das „inverse“ aeroelastische tailoring ermöglichte es, die vier auftretenden Flatterfälle (siehe Bild 1-4) im hohen Unterschallbereich (Ma<0.7) zu gruppieren. Die ASE-Komponenten umfassen Sensoren, Aktuatoren, Regler und Verstärkungsglieder für jede der fünf Hinterkantenklappen. Um die Flatterform zu kompensieren, können alle Aktuatoren (oder ausgewählte Kombinationen) gemäß der örtlichen Flügelverformung individuell angesteuert werden. Wegen der generischen Natur der verwendeten Klappenmodelle und Aktuatoren wurde hier auf deren spezifische Leistungsbetrachtung verzichtet.
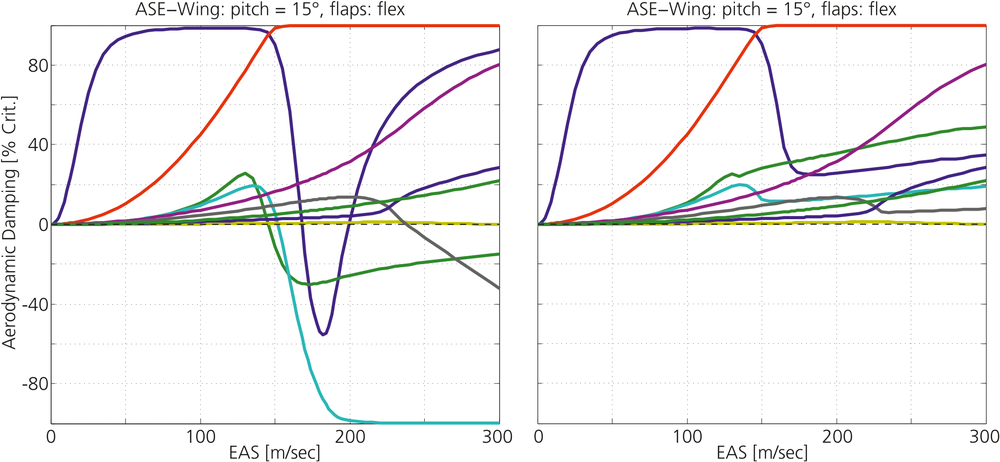
Bild 5: Flatterdiagramme des ASE-Flügels – Dämpfungsgrad des ungeregelten (links) und des geregelten Falles (rechts), hier: Unterdrückung aller vier Flatterfälle
Der Reglerentwurf besteht aus der Bestimmung seines Übertragungsverhaltens und der dynamischen Eigenschaften. Die Parameter der Übertragungsfunktionen (TF) können in einem automatisierten Verfahren bestimmt werden. Bei dem Aufbau der Regelkreise wurde auf die Gültigkeit des Superpositionsprinzips, das auf Modellinearität und modalen Ansätzen beruht, zurückgegriffen. Der Zusammenbau des aero-servoelastischen Gesamtsystems und die Lösung des abgeleiteten Flatterproblems erfolgte mit dem aeroelastischen Simulationsprogramm ZAERO.
Der flatterstabile Flügel
Neben den Eigenformen beschreiben die Flatterkurven als wesentliche Ergebnisse der Flatterrechnung die Veränderung des strukturdynamischen Verhaltens des Flügels bei steigender Fluggeschwindigkeit, wobei ein Vorzeichenwechsel der Dämpfungskurven ins Negative die Instabilitätpunkte anzeigt. Die Dämpfungsverläufe des ungeregelten open-loop Flügels einerseits, und des geregelten closed-loop Systems andererseits geben in Bild 5 beispielhaft wieder, wie die vier Flattermoden (siehe Bild 1-4) des Flügelmodells gänzlich getilgt werden. Die Ergebnisse der Flatteruntersuchung an dem generischen Flügelmodell haben gezeigt, dass durch den Entwurf von geeigneten Reglern und bei einer linearen Modellbetrachtung der Superpositionsansatz sich dazu eignet, eine beliebige Anzahl auch unterschiedlicher Flatterfälle gleichzeitig zu unterdrücken. Bei dem Übergang zu realen Strukturen werden darüber hinaus eine spezifische Aktuatorauslegung und die Einbeziehung nichtlinearer Systemeigenschaften, die jenseits dieser Untersuchung lagen, notwendig.




{kind=link}
{kind=link}
{kind=link}