The occurrence of flutter as a hazardous event of elastic structures in flow environment mostly leads to failure and demolition of the aircraft. The loss of flutter stability within a flight envelope can be avoided by shifting the flutter points to higher flight velocities or erase them at all. Beside constructional passive means of flutter mitigation, actively flutter affecting sub-systems can be integrated into the design. This will result in the incorporation of active control elements like sensors, actuators and controllers “in both worlds”, the real structure and the simulation model, and requires aero-servoelastic (ASE) closed-loop flutter simulations.
Active control in aircraft design
In order to beneficially influence the aero-mechanical behaviour of aircraft, active control measures in aeronautics have been applied or are being investigated in different fields. Automatic flight control systems which guarantee stability in maneuver or steady flight are well established within flight mechanics. Another promising field for the application of control systems are load alleviation devices, aiming at the reduction of structural loads during gust encounters or flight maneuvers. Here, an approach for the suppression of dynamic instabilities by favourably shifting flutter boundaries to higher flight speed regimes is realized. Thus, aeroelastic stability within the whole flight envelope can be ensured.
In order to influence the aeroelastic behaviour of highly flexible wings, on the system side the design, build-up and analysis of aero-servoelastic simulation models become necessary. The incorporation of active control elements like sensors, actuators and controllers leads to closed-loop models. The objective of this investigation is to reach the capability of completely erasing any kind of flutter occurrence, with restrictions neither in character nor number of the unstable eigenmodes.
Example of an actively controlled wing
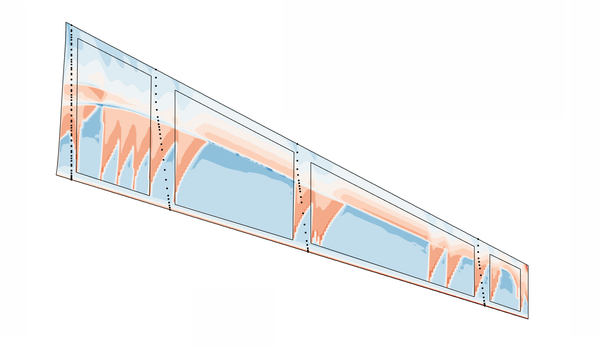
With the goal to determine eventual flutter cases, the model of a generic swept test wing has been built, purposely featuring four different flutter modes (see Fig.1-4) which by “inverse” aeroelastic tailoring could be grouped in the high subsonic region (Ma<0.7). The ASE elements comprise sensors, actuators, controllers and gain components for each of the five aerodynamic control surfaces. All control surface actuators (or a sub-set) can individually be addressed by structural acceleration sensor data, in order to counteract the flutter modes and thus prevent instable flight conditions. For the generic nature of both the actuators and the flap structure, here additional actuator performance considerations were omitted.
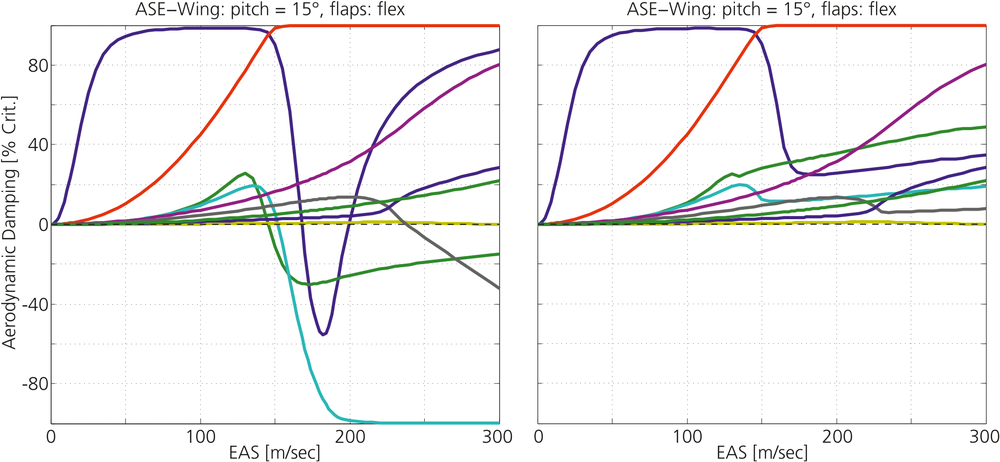
Figure 5: Flutter diagrams of the ASE-wing – damping ratios for the uncontrolled case (left) and for the controlled case (right), here: elimination of all four flutter cases
The flap controller design primarily consists of defining the characteristics of the controllers and finding suitable rational function expressions for the controller transfer functions (TF). The corresponding TF parameters have been determined in a semi-automated way. Model linearity and validity of the modal approach were assumed to make use of the superposition principle. The build-up of the aerodynamic panel grid, all ASE modelling components and the final solution of the flutter eigenvalue problems were performed in the aeroelastic software ZAERO. For more details, please refer to [1, 2].
The aeroelastically stable wing
Along with the eigenmodes, the flutter diagrams as main results of the aeroelastic simulations show the change of the structural dynamical behaviour with respect to free stream velocity. An eventual sign change of the damping curves indicates the loss of system stability. The damping ratios for the uncontrolled open-loop and for the controlled closed-loop system are compared in Fig.5. As can be seen in the diagram, effective flap controllers could be designed which individually counteract the respective four eigenmodes (see Fig.1-4) and remove the connected flutter instabilities. Through the investigations of this project, the chosen modelling approach has been proven suitable to cope with any kind or number of aeroelastic dynamic instabilities. To compensate flutter problems in real life wing structures, additional specific actuator design and the consideration of nonlinear system properties which were beyond the scope of this study become necessary.




{kind=link}
{kind=link}
{kind=link}