Artist’s impression of the Trace Gas Orbiter component of the ExoMars 2016 mission releasing the Schiaparelli lander. Schiaparelli will then descend to the Martian surface.
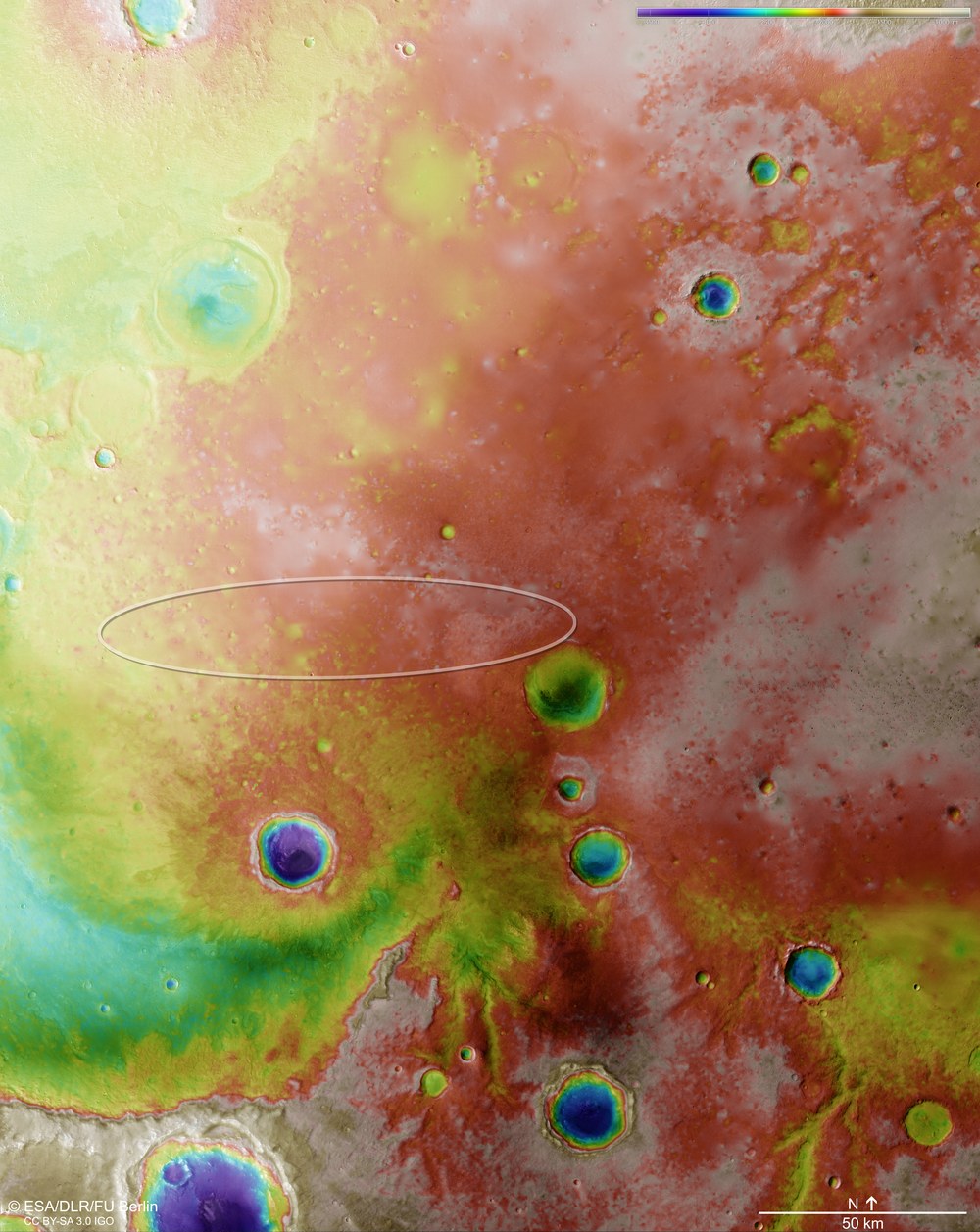
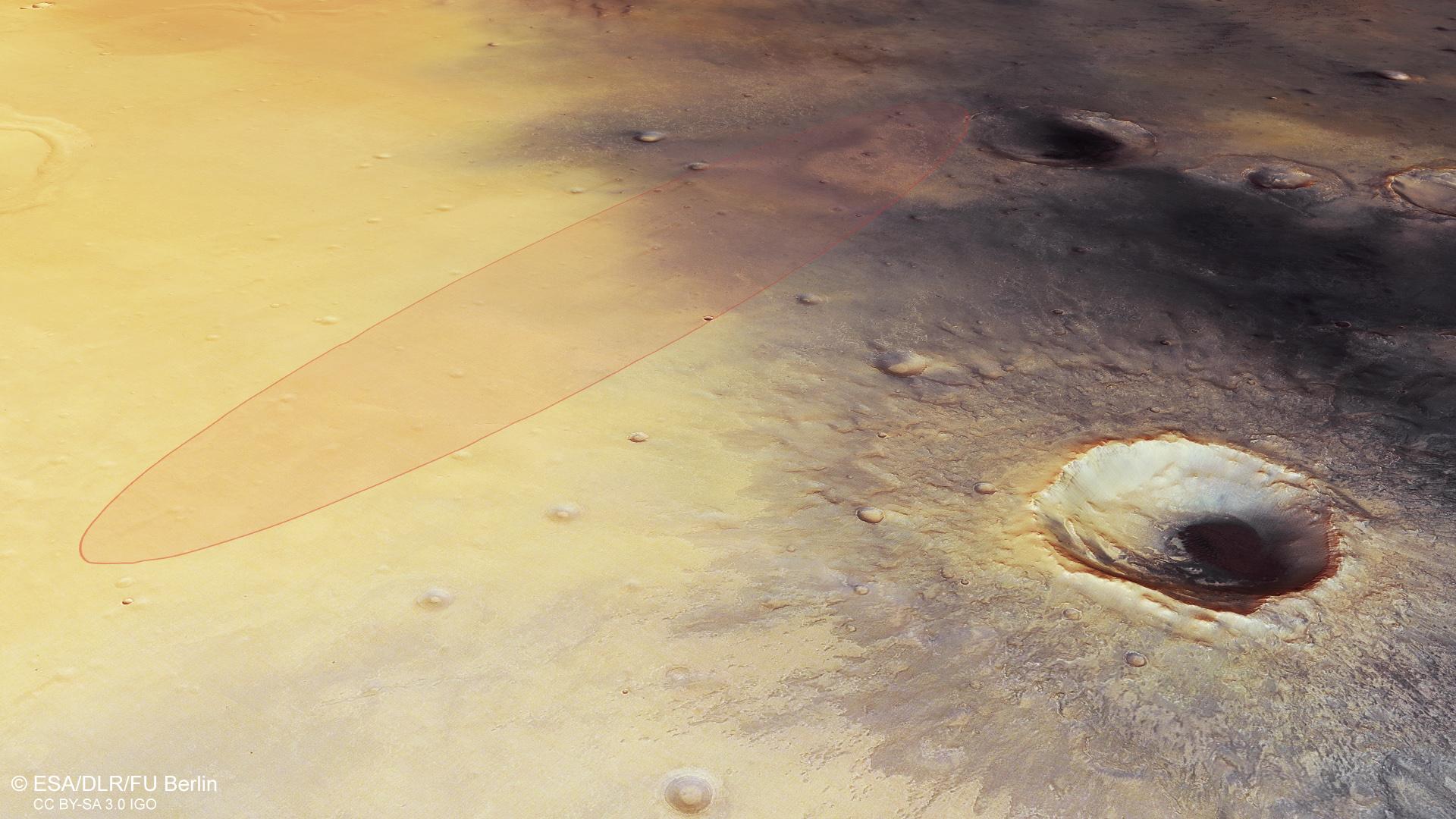
From the stereo image data acquired by he HRSC camera system, digital surface models can be derived that include (topographic) altitude information for each pixel. Such terrain models are useful for answering scientific questions but are also used for the characterisation of potential landing sites. The region in which the ESA landing demonstrator Schiaparelli will set down on 19 October 2016 – within this 15 kilometre wide and 30 kilometre long ellipse – on Mars was also examined in this way and ultimately selected.
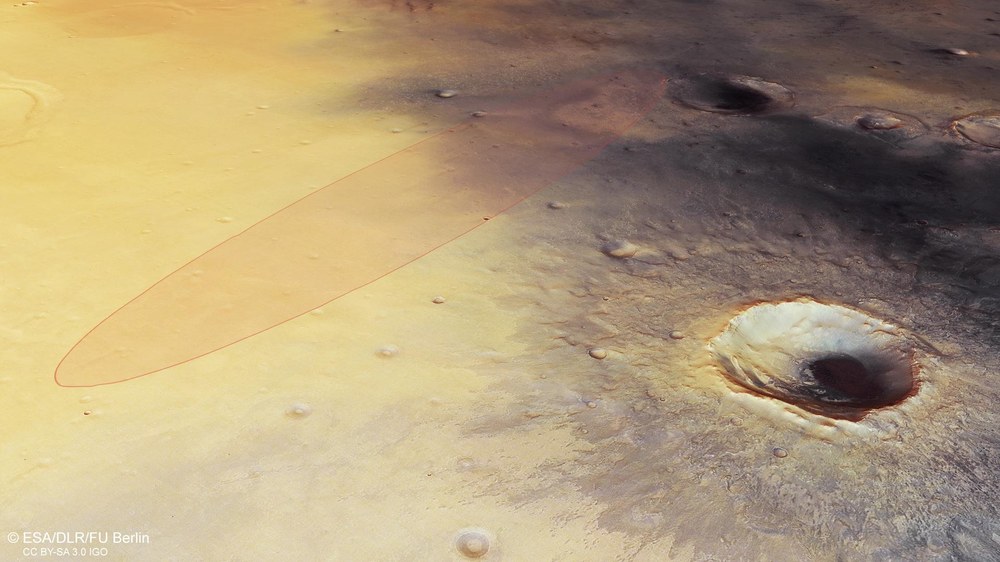
On 19 October, the ESA landing demonstrator Schiaparelli (Entry, Descent and Landing Demonstrator Module, EDM) will land in the Meridiani Planum. Schiaparelli will test different technologies and determine which ones should help the second part of the mission, ExoMars 2020 with the Pasteur Rover as a scientific payload, make a safe landing: Materials for the thermal protection system, a parachute, a radar altimeter and a thruster system for the final landing phase. The crater in the foreground has a diameter of about 25 kilometres.
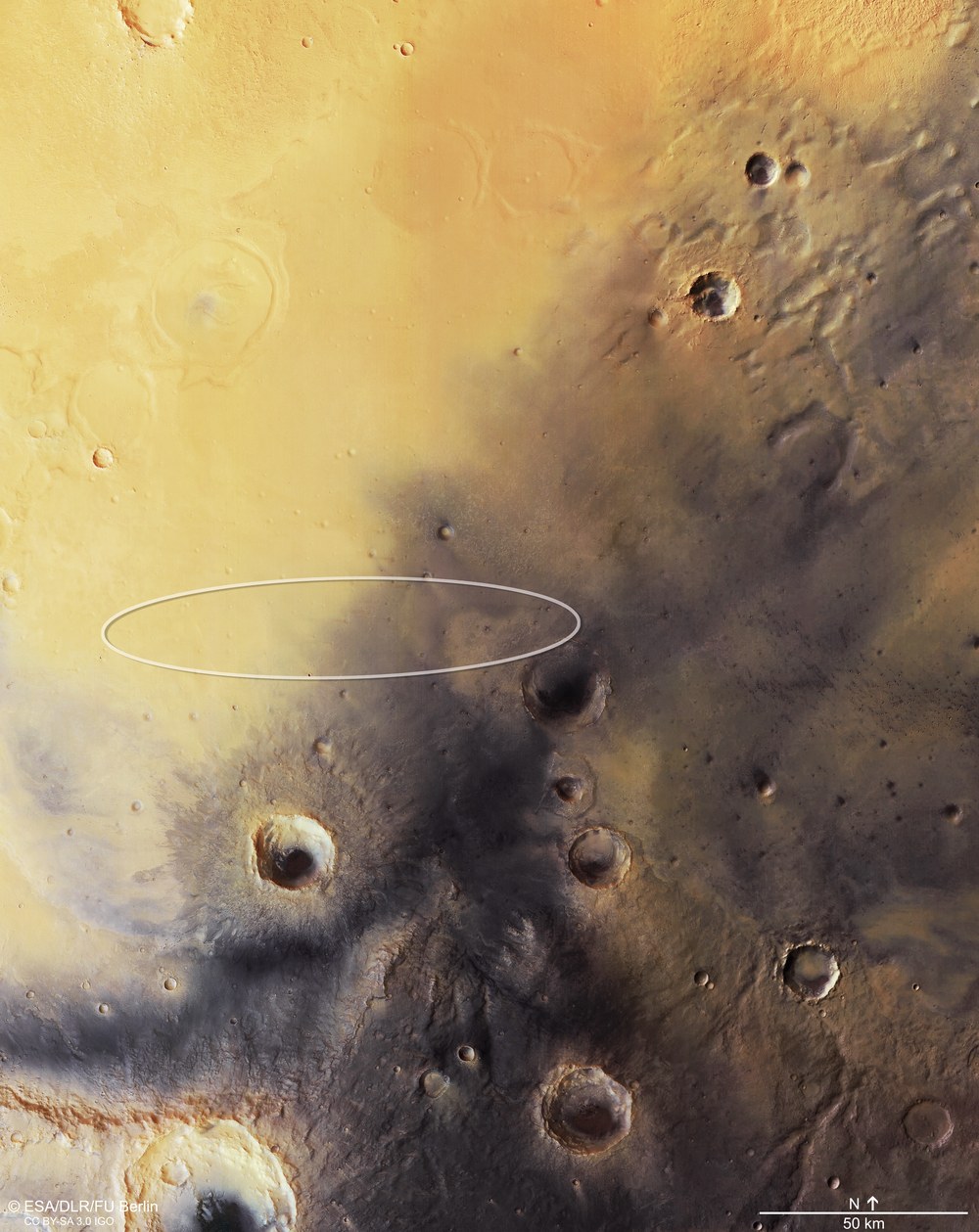
These images, acquired by the High Resolution Stereo Camera (HRSC), on board the European Mars Express spacecraft, operated by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR), show part of the Meridiani Planum region. On 19 October, ESA's Schiaparelli lander will touch down there, not far from where NASA's Opportunity rover landed on 25 January 2004 and which has been exploring the area since then.
The two-part joint ESA-Roscosmos ExoMars mission will look for signs of organic life on Mars. The first part – ExoMars 2016 – was launched from the Russian Baikonur cosmodrome by a Proton rocket on 14 March 2016. The mission consists of the Trace Gas Orbiter (TGO), which will investigate the trace gases in the Martian atmosphere, and Schiaparelli, the ExoMars Entry, Descent and Landing Demonstrator Module. Schiaparelli will examine different technologies and determine which should be useful for the second part of the mission – ExoMars 2020 with a Rover as a scientific payload – to land safely: materials for the thermal protection system, a parachute, a radar altimeter and a thruster system for the final landing phase.
A weather station to measure the atmospheric conditions at the landing site is also installed on board Schiaparelli. Various sensors will measure, among other things, the wind speed, humidity and pressure on the surface of the Red Planet, thus providing a 'Martian weather report' that could be useful for planning future missions.
The Schiaparelli landing site is marked as an ellipse in the picture below. It lies in the Meridiani Planum region at the point at which the Martian northern lowlands meet the southern highlands, and measures 100 kilometres east to west and 15 kilometers in the north-south direction. This area is relatively flat and level and was selected for the landing primarily due to the important safety aspects. Digital elevation models, which were calculated from data and images acquired by the HRSC camera, have helped to analyse the slopes within the landing ellipse in order to identify the best landing site for Schiaparelli.
The impact crater visible to the southeast of the landing ellipse is called Endeavour; it has a diameter of 22 kilometres and has been investigated by the Opportunity Rover since 2011. Opportunity and the structurally identical Spirit Rover were sent to Mars by NASA in 2003. Spirit operated on the other side of Mars at the Gusev crater until 2010; Opportunity is still in operation and is currently investigating the clay sediments that formed under the influence of water billions of years ago on Endeavour's western rim. The Rover also discovered dune fields in the crater that are moved by wind and dust storms. Sulphates and clays are directly related to the activity of water on the surface and in the soil. Additionally, fine-grained rocks in the Meridiani Planum indicate that a shallow body of water once existed here.
No encounter between Schiaparelli and Opportunity
Despite the conveniently close proximity of their landing sites, it is not – theoretically – possible for the two probes to meet (which would also hardly make sense scientifically): Schiaparelli is a stationary lander and Opportunity is located several kilometres outside the ESA probe's landing ellipse at Endeavour crater. It would take NASA's rover more than 11 years to move the marathon distance of more than 42 kilometres. In addition, the Rover is, from a technological viewpoint, not getting any younger. Opportunity is the longest-lived lander in the history of space exploration: Originally developed for a 90-day research expedition, Opportunity has now lived 48 times its expected operational life.
Image processing
The mosaic was created from four individual orbital strips (2064, 2075, 2086, 8423). The region imaged lies at approximately 352.5 to 356.5 degrees east and 4.4 degrees south to 0.5 degrees north. The colour mosaic was created from the nadir channel oriented perpendicular to the surface of Mars and the colour channels of the HRSC; the perspective angle view was calculated from the HRSC stereo channels. The view encoded in rainbow colours is based on a digital terrain model of the region from which the topography of the landscape can be derived. The reference body for the HRSC DTM is a Mars globe.
The HRSC experiment
The High Resolution Stereo Camera was developed at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in collaboration with partners in industry (EADS Astrium, Lewicki Microelectronic GmbH and Jena-Optronik GmbH). The science team, which is headed by principal investigator (PI) Ralf Jaumann, consists of over 40 co-investigators from 33 institutions and ten countries. The camera is operated by the To the Institute's website in Berlin-Adlershof. The images shown here were generated by the Institute of Geological Sciences at FU Berlin in conjunction with the DLR Institute of Planetary Research in Berlin.


{kind=link}
{kind=link}
{kind=link}