The actual position as well as the trajectory of arbitrary bodies can be measured by means of an optical position detection system. On the basis of photogrammetric algorithms the spacial distribution of special markers on the body surface is captured. Mapping on a CAD-model of the object under investigation allows for a synthesis of the bodies attitude and movement.
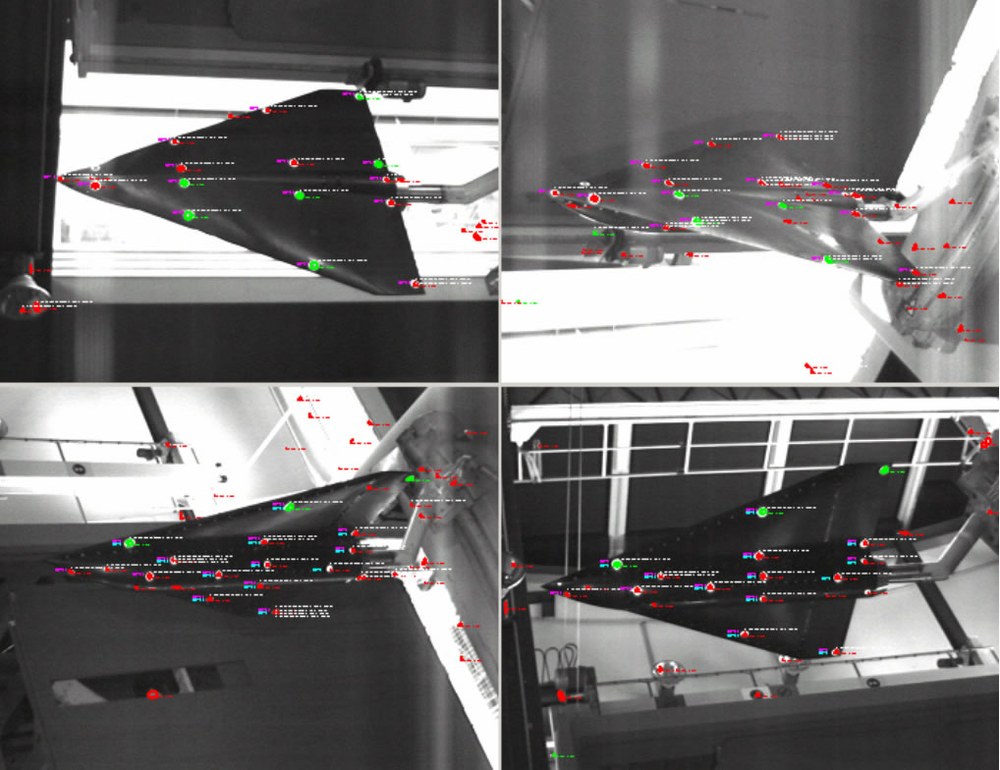
To detect the actual position of an aircraft model in a wind tunnel reflective markers are placed on its surface. Their spacial location can be determined by means of optical triangulation. An application of the measurement system is shown in the figure. In this case a multi-camera setup has been applied to continuously capture the model attitude during 360° roll manoeuvres.
Synthesis of model motion during a 360° roll manoeuvre
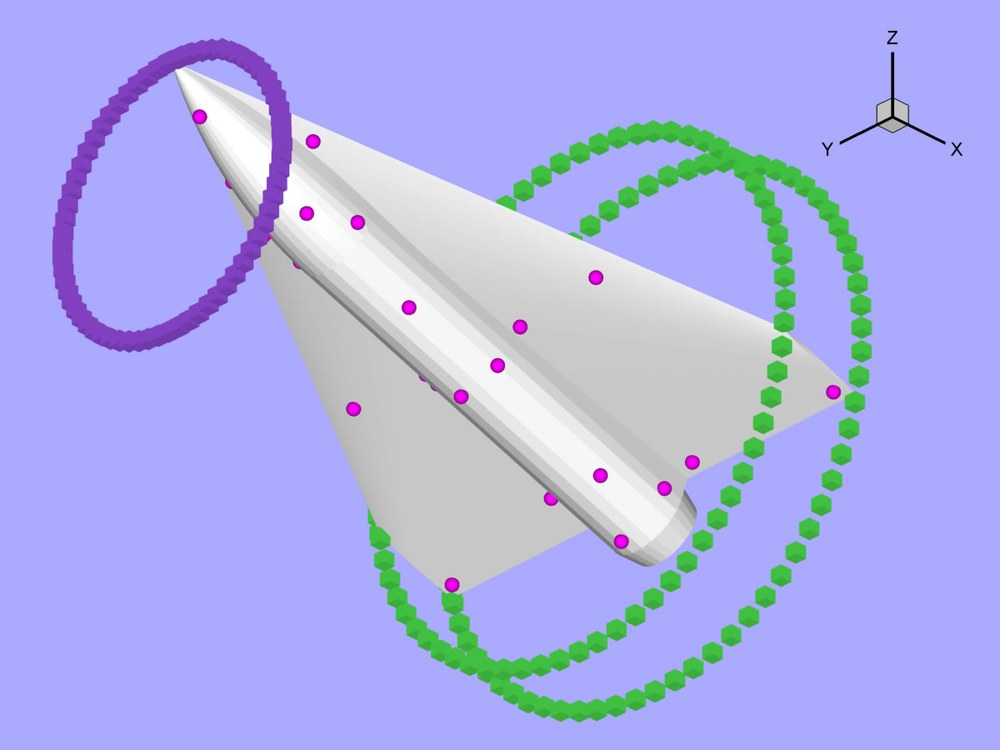
To represent the measured model position in a numerical framework the position markers are fitted to a CAD surface grid. This is illustrated in the figure for a synthesized model at a nominal angle of attack of alpha="18°" and a roll angle of phi="0°". In the case considered here the model was rotated on a tailspin balance with a rotation rate of f=0.15Hz. The acquisition frequency of the measurement system was 20Hz. That means during one revolution of the model its position has been detected 67 times with an angular spacing of 5.4°. The measured path of the model head and of the wing edges is shown in the figure.