
Ergebnisse des Projekts SAVeNoW: Ein virtuelles Stadtmodell für sicheren und nachhaltigen Verkehr

{kind=link}
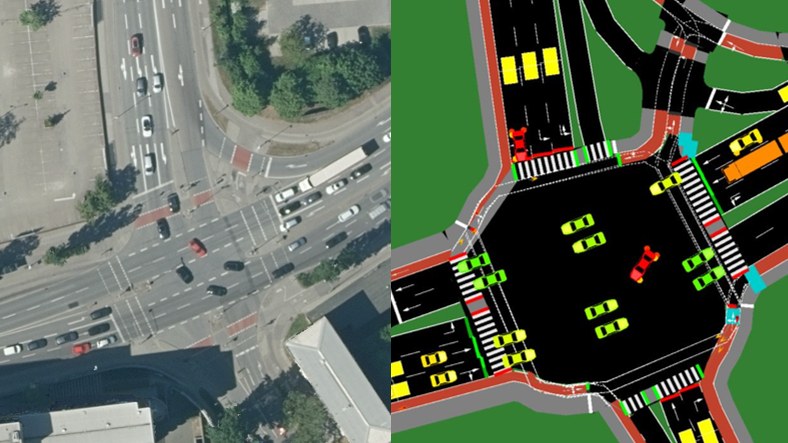
- Die Projektbeteiligten haben ein virtuelles Stadtmodell von Ingolstadt entwickelt, mit der die Stadt Maßnahmen zum Verkehrsmanagement oder zu baulichen Veränderungen vor der Realisierung prüfen kann.
- Das DLR hat erforscht, wie eine optimierte Verkehrssteuerung Radfahrende besser schützt.
- Im Projekt konnten die Wissenschaftlerinnen und Wissenschaftler die Objekterkennung von Verkehrsteilnehmenden und die Simulation des Verkehrsgeschehens verbessern.
- Schwerpunkte: Verkehrssteuerung, Sicherheit, Simulation
Wie kann eine Stadt ihren Verkehr effizienter, sicherer und nachhaltiger gestalten? Das hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) mit 12 weiteren Beteiligten aus Wissenschaft und Industrie im Projekt SAVeNoW erforscht. Dabei haben die Forschenden am Beispiel von Ingolstadt ein virtuelles Regionsmodell entwickelt. Mit dessen Hilfe können die unterschiedlichsten Maßnahmen, wie Verkehrsmanagement oder bauliche Veränderungen im Stadtgebiet, vor der teuren Einführung in die Praxis simuliert und bewertet werden.
In diesem Modell kommen Daten aus vielen verschiedenen Quellen zusammen, wie Karten- und Wetterdaten, aber auch Bilddaten von Kameras und Punktwolken von LiDAR-Sensoren. Ergänzt werden diese noch von sogenannten Verkehrsteilnehmerverhaltensmodellen, die das Verhalten von Verkehrsteilnehmenden besser beschreiben, als es derzeit der Fall ist. Beispielsweise hat das DLR untersucht und modelliert, wie rechtsabbiegende Kraftfahrzeuge mit geradeausfahrenden Radfahrenden interagieren. Die Stadt Ingolstadt kann mit dem Regionsmodell unterschiedliche Rahmenbedingungen simulativ untersuchen. Maßnahmen zum Verkehrsmanagement, wie Sperrungen von Brücken oder Straßen, Umleitungsempfehlungen, aber auch Kollisionswarnsysteme, die abbiegende Kfz vor geradeausfahrenden Radfahrenden warnen, lassen sich so durchspielen. Außerdem kann die Kommune die Auswirkungen auf Umwelt, Verkehrsfluss oder Sicherheit beurteilen.
Das Institut für Verkehrssystemtechnik beteiligte sich an SAVeNoW mit folgenden Arbeitsschwerpunkten:
Verkehrssteuerung besser bewerten
In Ingolstadt haben die Wissenschaftlerinnen und Wissenschaftler die sogenannte multikriterielle Verkehrssteuerung entwickelt und erprobt. Dabei handelt es sich um ein neuartiges, regelbasiertes Verkehrssteuerungsverfahren, das die Kriterien Sicherheit, Effizienz und die Reduktion von Emissionen nach Bedarf unterschiedlich stark berücksichtigen kann. Voraussetzung dafür bildete die Echtzeitkommunikation von Positionen und Geschwindigkeiten der relevanten Verkehrsteilnehmenden, um deren optimale Beeinflussung zu bewirken. Das Verfahren wurde mit der mikroskopischen Verkehrssimulation SUMO implementiert und analysiert. Ein Fokus der Forschenden lag dabei in der Einbindung von Radfahrenden in die Verkehrssteuerung. Sie konnten in der Simulation zeigen, dass Verkehrssteuerungsmaßnahmen, wie die Erhöhung des Grünzeitvorlaufs für Radfahrende oder die Begrenzung der maximalen Abbiegegeschwindigkeit von Fahrzeugen, die Verkehrssicherheit von Radfahrenden an Kreuzungen mit Ampeln deutlich verbesserten, während die Effizienz des Kfz-Verkehrs bei nahezu gleichbleibenden Emissionen leicht abnahm.
Verlässlichere Objekterkennung durch Datenfusion
Aussagen zur Verlässlichkeit und Genauigkeit der Detektion von Verkehrsteilnehmenden verbessern sich, wenn mehrere unterschiedliche Sensoren miteinander verknüpft werden, weil mehr Sensoren auch mehr „sehen“. Man spricht dann von Datenfusion. Das DLR hat in SAVeNoW ein bestehendes Verfahren zur Fusion unterschiedlicher Sensoren (fahrzeugseitiges LiDAR mit infrastrukturseitiger Kamera) erweitert, um die Lokalisierungsfehler der Positionsschätzungen der Verkehrsteilnehmenden zu verbessern.
Realitätsnahe Simulation von Radfahrenden
Auf der Grundlage von real im Verkehr erhobenen Weg-Zeit-Verläufen von Radfahrenden und Fahrzeugen konnte das DLR deren Interaktionsverhalten erheben und als sogenanntes taktisches Radfahrendenmodell in die mikroskopische Verkehrssimulation SUMO integrieren. Mit einer Genauigkeit von 94% stimmt das Modell mit dem realen Interaktionsverhalten der Radfahrenden überein. Die Forschenden zeigten damit, dass das taktische Interaktionsverhalten beim Rechtsabbiegen von Fahrzeugen mit kreuzenden Radfahrenden in SUMO deutlich realistischer abgebildet werden konnte als es vorher der Fall war. Damit quantifizierte das DLR die ersten Schritte auf dem Weg zu einer mikroskopischen Verkehrssimulation, die Interaktions- und damit auch mögliches Unfallverhalten realitätsnäher abbilden kann.
Vorhersage von kritischen Situationen mit künstlicher Intelligenz
Ebenso konnte ein bestehendes, regelbasiertes Verfahren zur infrastrukturseitigen Vorhersage von Weg-Zeit-Verläufen der Verkehrsteilnehmenden verbessert werden. Dazu haben die Forschenden spezielle neuronale Netze und ein sogenanntes Random Forest-Modell mit real im Verkehr erhobenen kritischen und unkritischen Situationen trainiert, um Weg-Zeit-Verläufe der Verkehrsteilnehmenden besser vorherzusagen. Das Verfahren zur Risikoprädiktion wird im Rahmen einer Dissertation auch nach Projektende weitergeführt.
Über SAVeNoW
Der Projektname SAVeNoW steht für „Funktions- und Verkehrs-Sicherheit für Automatisierte und Vernetzte Mobilität – Nutzen für die Gesellschaft und oekologische Wirkung“. Unter der Leitung der Audi AG haben die Technische Hochschule Ingolstadt, TU München, Katholische Universität Eichstätt-Ingolstadt, Universität Stuttgart, Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI, e:fs, Continental, 3D Mapping Solutions GmbH, ASAP Engineering GmbH, TWT GmbH Science & Innovation, sepp.med und das Deutsche Zentrum für Luft- und Raumfahrt e.V. am Projekt mitgearbeitet. SAVeNoW wurde vom Bundesministerium für Digitales und Verkehr (BMDV) im Rahmen der Förderrichtlinie „Ein zukunftsfähiges und nachhaltiges Mobilitätssystem durch automatisiertes Fahren und Vernetzung“ gefördert. Das Projekt lief von 01.03.2021 bis 31.12.2023 und konnte seine Methoden und Ergebnisse in einer Ausstellung in der Ingolstädter Wissenschaftsgalerie mehr als 1000 Besucherinnen und Besuchern präsentieren. Die Ergebnisse werden auch auf https://savenow.de/ präsentiert.