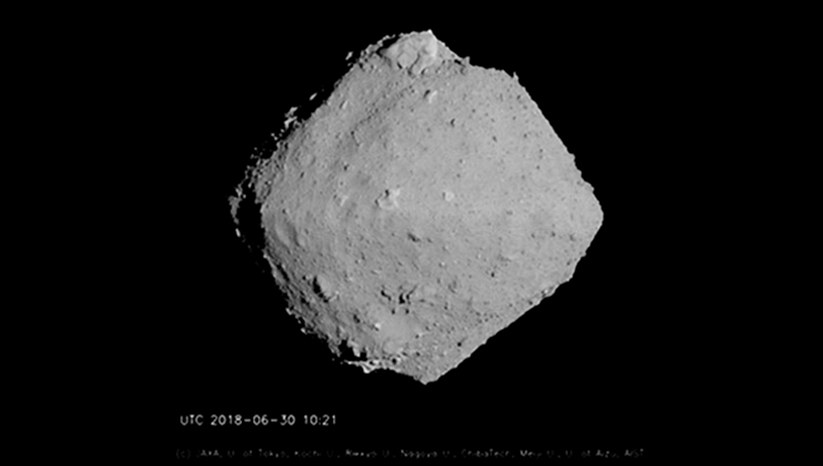
Der Asteroid Ryugu hat in 300 Millionen Kilometern Entfernung von der Erde einen neuen Bewohner: Lander MASCOT wurde am 3. Oktober 2018 auf dem Asteroiden abgesetzt und nahm seine Arbeit auf. Um 3.58 Uhr Mitteleuropäischer Zeit wurde das Landegerät erfolgreich von der japanischen Raumsonde Hayabusa2 getrennt.
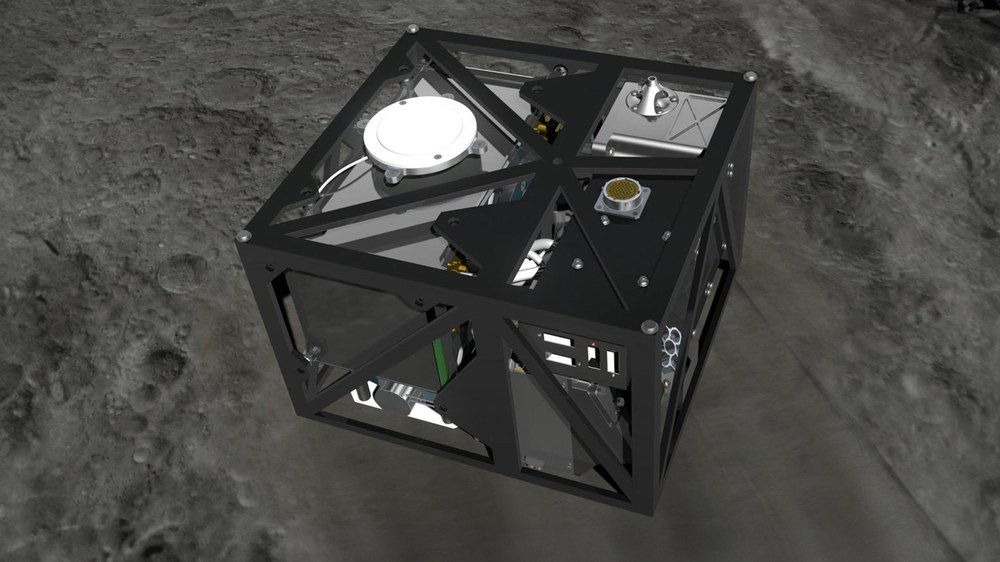
2014 startete die Sonde und machte sich auf den Weg zu ihrem Ziel. Nach ihrer Ankunft wurde dann zunächst einmal das unbekannte Gebiet aus einer Umlaufbahn heraus erkundet. Der schuhkartongroße Lander ist für den Fall auf den Asteroiden durch ein stabiles und dennoch sehr leichtes Gehäuse geschützt. Im Inneren des DLR-Landers sitzen die vier Instrumente, die vor Ort die Messungen auf einem Asteroiden durchführen:
das Infrarot-Spektrometer analysiert die Zusammensetzung der Asteroidenoberfläche
ein Magnetometer untersucht das Magnetfeld
einer Weitwinkelkamera werden Landeplatz und Feinstruktur des Bodens aufgenommen
ein Radiometer misst unter anderem die Temperatur an der Oberfläche.
Überwacht wird der Lander dabei aus dem DLR-Kontrollzentrum des Nutzerzentrums für Weltraumexperimente (MUSC).
MASCOT Flugaktivitäten
Okt. 2018
Landing and Science Sequence
Sept. 2018
MASCOT Delivery preparation
Aug. 2018
Landing Site selection
Jul. 2018
MASCOT Health check
Jul. 2018
Arrival at the Asteorid
Aug. 2017
MASCOT On-Asteroid Sequence Test
Jul. 2017
MASCOT Health check
Jul. 2017
MASCOT Software Upload
May 2017
MASCOT Health check
Nov. 2016
MASCOT Instrument Calibration #2
Oct. 2016
HY2-MASCOT Communication check
Jul. 2016
MASCOT Thermal Evaluation
Jul. 2016
Data Transfer Test (On-Asteroid Spacecraft configuration)
Jul. 2016
MASCOT Health check
Jan. 2016
CAM data download
Sep. 2015
PRM activation (launch lock)
Sep. 2015
MASCOT Instrument Calibration #1
Jun. 2015
HY2-MASCOT Communication check
Jun. 2015
MASCOT Health check
Die DLR-Beteiligung an der Hayabusa2-Mission
Das DLR-Institut für Raumfahrtsysteme entwickelte in Kooperation mit der französischen Raumfahrtagentur CNES den Lander und testete ihn unter Weltraumbedingungen bei Parabelflügen, im Fallturm, auf dem Schütteltisch sowie in der Thermalvakuum-Kammer. Das DLR-Institut für Faserverbundleichtbau und Adaptronik war für die stabile Struktur des Landers zuständig. Das DLR Robotik und Mechatronik Zentrum entwickelte den Schwungarm, der Mascot auf dem Asteroiden hüpfen lässt. Das DLR-Institut für Planetenforschung steuerte die Kamera MASCAM und das Radiometer MARA bei. Überwacht und betrieben wird Asteroidenlander Mascot aus dem DLR-Kontrollzentrum des Nutzerzentrums für Weltraumexperimente (MUSC) in Köln.