MASCOT - an asteroid lander
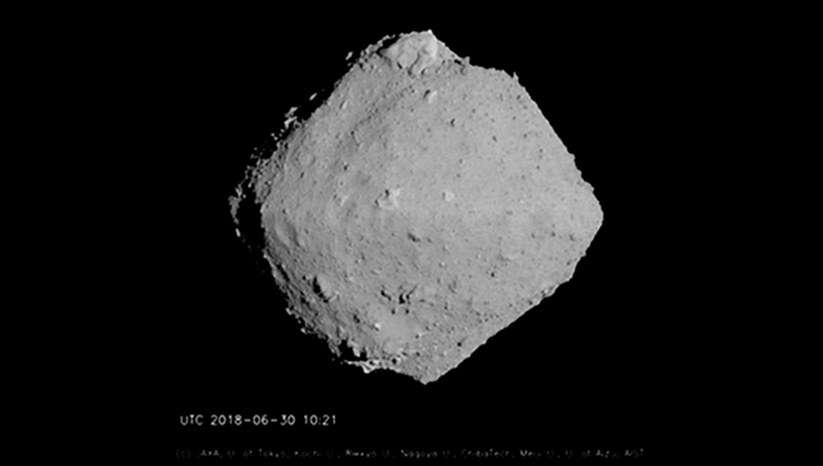
The near-Earth asteroid Ryugu, located approximately 300 million kilometres from Earth, has a new inhabitant: On 3 October 2018, the Mobile Asteroid Surface Scout (MASCOT) landed on the asteroid and began to work. The lander successfully separated from the Japanese Hayabusa2 space probe at 03:58 CEST.
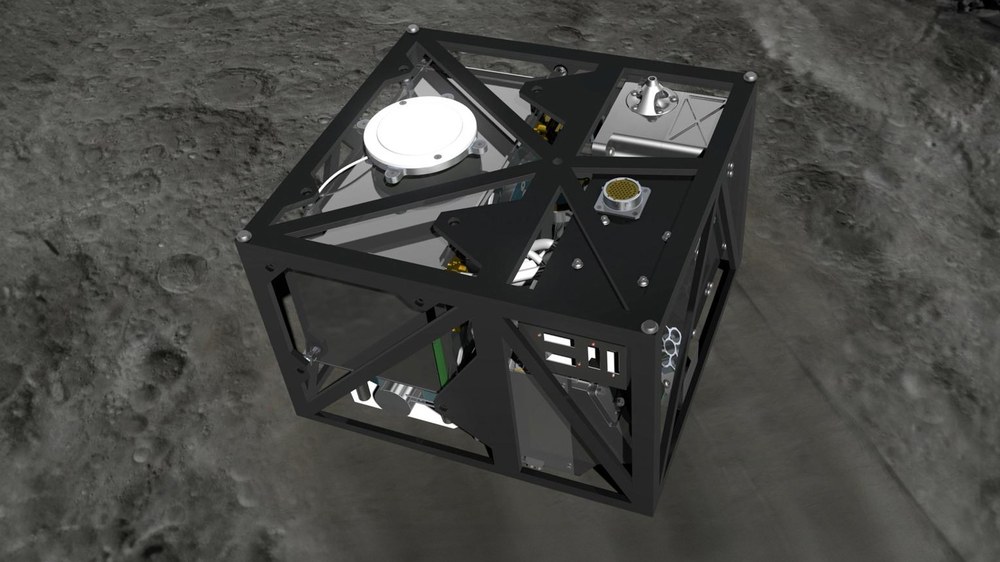
The spacecraft was launched in 2014 and upon arrival in 2018, initially remained in orbit to scout the unknown terrain. A stable, yet extremely light cover will protect the shoe box-sized lander as it falls to the asteroid’s surface. The four instruments designed to conduct in situ measurements on the asteroid are located inside the DLR landing craft:
- the infrared spectrometer that will analyse the surface composition
- magnetometer to investigate the magnetic field
- a wide-angle camera to record the landing site and the fine structure of the soil
- a radiometer that will measure surface temperatures, among other things.
During its mission, the landing craft will be monitored from the DLR Microgravity User Support Center (MUSC).
| | MASCOT Flight Activities |
|---|
Okt. 2018 | Landing and Science Sequence |
Sept. 2018 | MASCOT Delivery preparation |
Aug. 2018 | Landing Site selection |
Jul. 2018 | MASCOT Health check |
Jul. 2018 | Arrival at the Asteorid |
Aug. 2017 | MASCOT On-Asteroid Sequence Test |
Jul. 2017 | MASCOT Health check |
Jul. 2017 | MASCOT Software Upload |
May 2017 | MASCOT Health check |
Nov. 2016 | MASCOT Instrument Calibration #2 |
Oct. 2016 | HY2-MASCOT Communication check |
Jul. 2016 | MASCOT Thermal Evaluation |
Jul. 2016 | Data Transfer Test (On-Asteroid Spacecraft configuration) |
Jul. 2016 | MASCOT Health check |
Jan. 2016 | CAM data download |
Sep. 2015 | PRM activation (launch lock) |
Sep. 2015 | MASCOT Instrument Calibration #1 |
Jun. 2015 | HY2-MASCOT Communication check |
Jun. 2015 | MASCOT Health check |
DLR's participation in the Hayabusa2 mission
The DLR Institute of Space Systems developed the lander and tested it under space conditions during parabolic flights, in a drop tower, on a shaker and in a thermal vacuum chamber. The DLR Institute of Composite Structures and Adaptive Systems was responsible for the stable structure of the lander. The DLR Institute of Robotics and Mechatronics developed the swing arm that MASCOT will use to 'hop' on the asteroid. The DLR Institute of Planetary Research managed the development of the MASCAM camera and the MARA radiometer. The asteroid lander is being monitored and controlled from the Microgravity User Support Center (MUSC) in Cologne.
The final news about the mission