
Szenariobasierte Verifizierung und Validierung von automatisierten und autonomen Systemen
Automatisierte und autonome Verkehrssysteme sollen nicht nur das Reisen komfortabler, sondern auch sicherer machen. Um dies zu verwirklichen und um automatisierte und autonome Verkehrssysteme auf den Markt zu bringen, ist es daher sehr wichtig, ihren sicheren Betrieb zu gewährleisten. Dies ist keine leichte Aufgabe, da nicht nur die Systeme selbst hochkomplex sind, sondern auch der Input, den sie erhalten (die Umwelt). Um sie zu verifizieren und zu validieren, müssen wir sie daher nicht nur sicher entwickeln, sondern auch ausgiebig testen.
Für automatisierte Fahrsysteme beträgt die Anzahl der Testkilometer, die für eine naive statistische Überprüfung erforderlich sind, je nach Annahmen/Unfalltyp mehrere hundert Millionen Kilometer (vgl. Wachenfeld 2015, Kalra 2016). Zum Vergleich: Alle asphaltierten Straßen in den USA sind nur etwa 4,3 Mio. km lang. Diese Tests müssten mit jedem neu entwickelten oder auch nur leicht modifizierten automatisierten Fahrsystem durchgeführt werden.
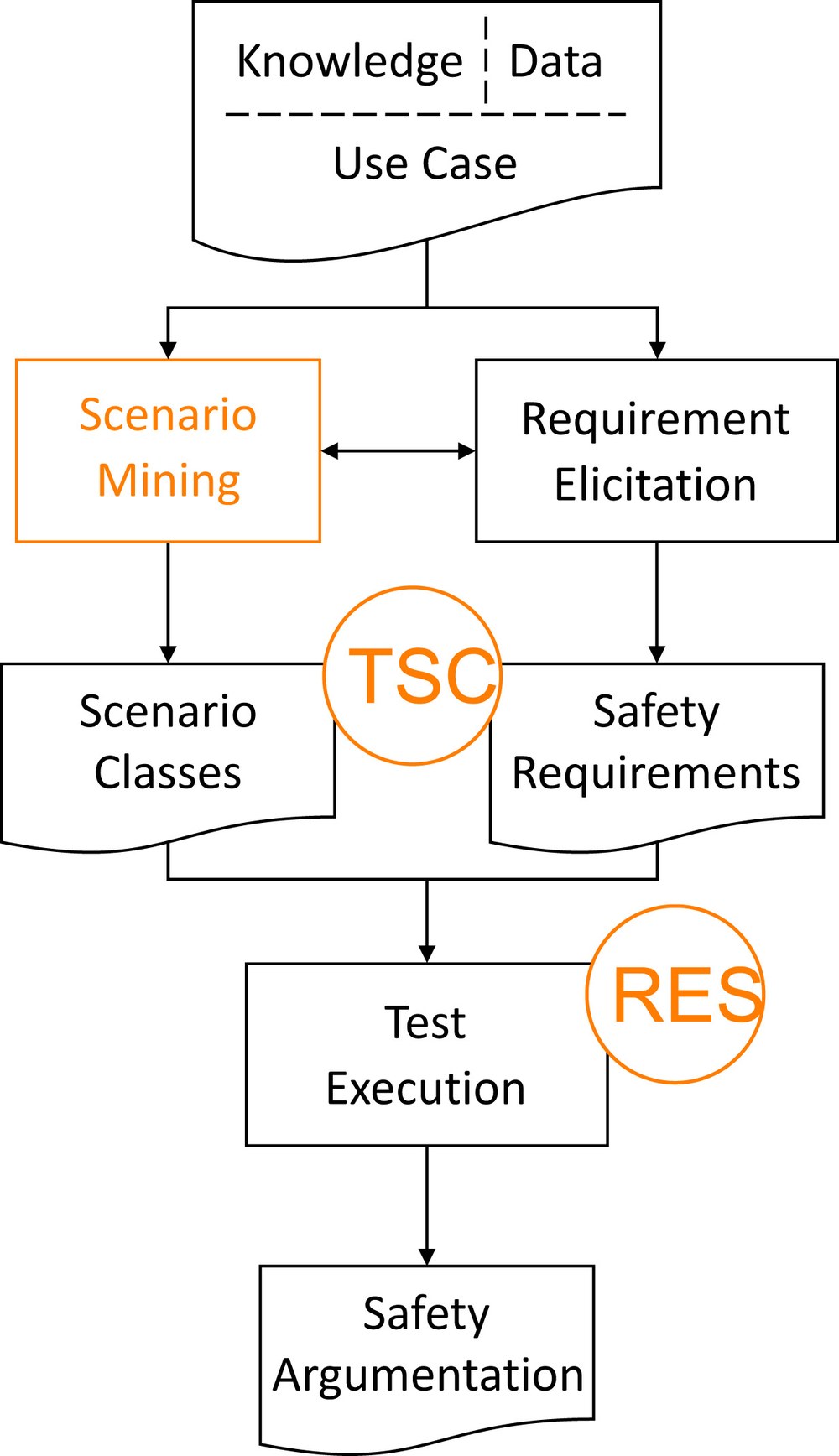

Eine vielversprechende Lösung für diese Herausforderung ist ein szenariobasierter Ansatz, in dem Szenarien für verschiedene Phasen des Verifikations- und Validierungsprozesses auf unterschiedlichen Abstraktionsebenen beschrieben werden. Wir entwickeln Methoden und Prototypen, die eine szenariobasierte Verifikation und Validierung in diesen Phasen unterstützen.
Scenario Mining
Szenarien sind die Grundlage, um den Suchraum für Verifikations- und Validierungsansätze für auto-matisierte und autonome Systeme zu reduzieren, indem viele ähnliche konkrete Szenarien durch Klassen von Szenarien beschrieben werden können. Der Prozess zur Ermittlung dieser abstrakten Szenarien wird als Scenario Mining bezeichnet, und wir entwickeln daten- und expertenbasierte Methoden zur systematischen Ableitung von Szenarienkatalogen.
Szenariospezifikation mit Traffic Sequence Charts (TSC)
Wir konzipieren Traffic Sequence Charts, eine Spezifikationssprache zur kompakten Beschreibung von Klassen von Szenarien und Anforderungen. Der Kerngedanke von TSCs ist die grafische Darstellung von Verkehrssituationen, die es erlaubt, sich auf relevante Aspekte zu konzentrieren, ohne Mehrdeutigkeiten einzuführen. Als visuelle als auch formale Sprache können TSCs sowohl für die Spezifikation, Dokumentation und Kommunikation zwischen Stakeholdern als auch für die automatisierte Verarbeitung in Werkzeugketten verwendet werden. Um TSCs entlang aller Phasen des Entwicklungsprozesses zu unterstützen, entwickeln wir verschiedene Methoden und Werkzeugprototypen, darunter einen TSC-Editor, ein Werkzeug namens TSC2OpenX, um TSCs in OpenSCENARIO-Dateien für die Simulation zu instanziieren, sowie Methoden zur Überwachung von TSCs anhand von Simulations- und realen Daten.
Rare-Event Simulation (RES)
Automatisierte und autonome Systeme sind in der Regel sehr komplex und müssen in einer riesigen Anzahl von Szenarien sicher funktionieren. Es ist oft unmöglich, all diese Szenarien zu untersuchen, insbesondere deswegen, weil kritisches Verhalten sehr selten auftritt. Zur Lösung dieses Problems setzen wir intelligente Optimierungsalgorithmen ein, um die Szenarien des gegebenen Systems effizienter zu untersuchen und bestimmte Parameterkombinationen zu finden, bei denen kritisches Verhalten (seltene Ereignisse) des zu testenden Systems auftritt.