
Real-Time Onboard Navigation
Introduction

GPS receivers on LEO satellites have traditionally supported both ground-based and onboard navigation tasks. The distinction between both areas is primarily driven by accuracy needs and the associated processing methodology. A 10 m and 0.1 m/s navigation accuracy is generally considered adequate for use in attitude and orbit control systems (AOCS). Following the deactivation of Selective Availability (SA) this accuracy can readily be provided by the kinematic navigation solution using a single-frequency GPS receiver. On the other hand, a much higher accuracy is required in many remote sensing and science missions. Applications such as altimetry, gravimetry, SAR interferometry, or atmospheric sounding call for a sub-decimeter position accuracy and a sub mm/s velocity knowledge. So far, this accuracy can only be achieved in a ground-based reduced dynamic orbit determination using dual-frequency carrier phase measurements along with precise GPS ephemeris products and auxiliary environmental information.
In an effort to improve the accuracy of onboard navigation solutions, the use of Kalman filtering and dynamical orbit models has been studied by various authors. While originally intended as a means to overcome SA induced navigation limitations, the use of dynamical filtering techniques nowadays promises a sub-meter level onboard orbit determination accuracy. An inflight demonstration of GPS based real-time navigation on the SAC-C satellite has resulted in 3D position errors of 1.5 m when using broadcast ephemerides. Further improvements (by up to a factor of ten) are expected from the utilization of real-time generated GNSS ephemerides that can be generated from a sufficiently large set of monitoring stations such as the NASA/JPL Global Differential GPS System (GDGPS). Applications that may benefit from accurate real-time orbit information onboard a satellite include the onboard geocoding of high resolution imagery, the open-loop operation of altimeters, atmospheric sounding and the maintenance of satellite constellation. Real-time onboard navigation using GNSS measurements can thus contribute to an increased autonomy of future space missions, reduced ground operations cost and improved science return.
The BIRD Onboard Navigation System (ONS)
A first real-time navigation system has been developed at DLR for use onboard the BIRD technology demonstration satellite in 2001. The BIRD Onboard Navigation System (ONS) makes use of a GPS Embedded Module (GEM-S) by Rockwell Collins to obtain GPS position fixes for real-time orbit determination. GEM-S is a five channel L1 SPS C/A- and P-code receiver, that has earlier been flown on several Space Shuttle missions. The ONS executes on the BIRD flight computer, which features an industrial Power PC 823e processor operated at 48 MHz clock rate with a performance of 66 MIPS.
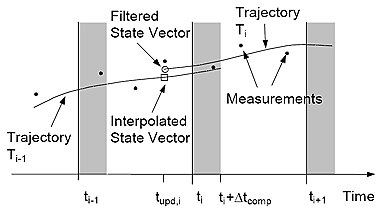
The GPS position fixes are treated by the ONS as statistically independent pseudo-measurements which are processed within an extended Kalman filter. The ONS employs an advanced numerical integration scheme (RK4R), that extends the common Runge-Kutta 4th order algorithm (RK4) by a Richardson extrapolation and a Hermite interpolation. This allows for an efficient provision of dense position output, that is required for the high-frequency geocoding of the BIRD payload images. The ONS force model applies the JGM-3 coefficients to model the Earth's gravity field, that is completely taken into account up to order and degree of 10.
Upon filter convergence, the obtained orbit determination accuracy for the position is 5.3 m (3D rms). Thus the dynamical model applied within the Kalman filtering improves the kinematic GEM-S position accuracy by a factor of about two. Even of higher importance than the position error is the velocity accuracy, resulting from a dynamical smoothing of kinematic GEM-S position fixes, which yields 6.3 mm/s (3D rms). The major improvement from a dynamical smoothing of the instantaneous GEM-S solutions is thus gained for the velocity errors which are improved by more than a factor of 50. When current GPS data are unavailable, e.g. due to power or thermal constraints, it has been shown that the ONS still provides position data with an accuracy of about 110 m within a prediction arc of 110 mins.
The Phoenix eXtended Navigation System (XNS)
The dynamical trajectory model adopted in the XNS accounts for the aspheric gravitational potential of the Earth, luni-solar gravitational perturbations, solar radiation pressure and atmospheric drag using a Harris-Priester model. For use at low altitudes, a GGM01S gravity field model up to degree and order 40 is employed and solid Earth tides can be incorporated as needed. To minimize the impact of reference system transformation uncertainties, the equation of motion is consistently formulated in a co-moving Earth-fixed coordinate system with proper account of centrifugal and Coriolis accelerations. Even though UT1 and polar motion data can be provided via the XNS command interface if deemed necessary, the filtered state in the Earth-fixed system is essentially insensitive to errors in these parameters. Remaining imperfections of the dynamical model (caused mainly by a simplified treatment of spacecraft surface forces) are compensated by empirical accelerations in radial, tangential and normal direction. These accelerations are treated as exponentially correlated random variables in the extended Kalman filter. In total, the filter state comprises 6 position-velocity components,1 radiation pressure coefficient, 1 drag coefficient, 3 empirical accelerations, 1 clock offset and 12 GRAPHIC biases that are simultaneously adjusted from the GPS measurements.
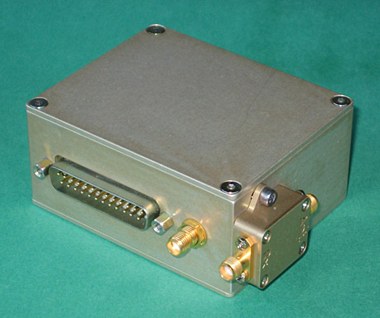
Inside the Phoenix-XNS receiver, the navigation filter is executed as a low priority background task in parallel to the GPS tracking and signal processing. The 32-bit ARM7TDMI processor is clocked at 30 MHz and provides enough computing power to operate the Kamna filter at an update interval of 30 s. Signal simulator tests have shown that a position accuracy of better than 1 m can be achieved with the Phoenix-XNS receiver. Firsts flight results are expected in 2009 from ESA's PROBA-2 mission and the X-Sat satellite of the Nanjang University, Singapore.
Further Reading
Gill E., Montenbruck O., Kayal H.;
The BIRD Satellite Mission as a Milestone Towards GPS-based Autonomous Navigation;
Navigation - Journal of the Institute of Navigation 48/2, 69-75 (2001).
Montenbruck O., Gill E.;
State Interpolation for On-board Navigation Systems;
Aerospace Science and Technology 5, 209-220 (2001).
Gill E., Montenbruck O., Arichandran K., Tan S. H., Bretschneider T.;
High-Precision Onboard Orbit Determination for Small Satellites - The GPS-based XNS on X-SAT;
6th Symposium on Small Satellites Systems and Services, Sept. 20-24, La Rochelle, France (2004).
Montenbruck O., Gill E., Markgraf M.;
Phoenix-XNS - A Miniature Real-Time Navigation System for LEO Satellites;
3rd ESA Workshop on Satellite Navigation User Equipment Technologies, NAVITEC'2006, 11-13 December 2006, Noordwijk (2006).
Montenbruck O., Ramos-Bosch P.;
Precision Real-Time Navigation of LEO Satellites using Global Positioning System Measurements;
GPS Solutions (2007). DOI 10.1007/s10291-007-0080-x