
Real-Time GPS Clock Determination

Motivation
The German Space Operations Center (GSOC) of DLR routinely performs precise orbit determination (POD) for it's low earth orbit missions. The requirements for many current and future missions require the satellite orbit to be determined shortly after the ground station pass, because this information is needed for further processing the data of the satellite’s payloads. The observations of the satellite’s GPS receiver are available immediately after the downlink to the ground station. Positioning also requires precise orbit and clock data for the complete GPS constellation. Predictions of clock offsets and drifts, which are provided for example in the predicted part of the IGS ultrarapid orbits or the broadcast ephemerides, deviate quickly from the true values by several decimeters or even meters. This deviation is caused by the stochstic clock noise and frequency variations of the atomic frequency standards of the GPS satellites. Predicted orbit/clock-products with an age-of-data of several hours are therefore unusable for PPP applications, which require a carrier-phase based positioning accuracy down to centimeter level. The solution to this problem is the use of clock offsets, which have been estimated from GPS measurements originating from a network of sensor stations.
For this reason the real-time system for clock estimation (RETICLE) has been developed at German Space Operations Center of DLR. The generated orbit/clock-products will be used to support orbit determination of low-earth-orbit (LEO) satellites for up-coming space missions, which require near real-time orbit determination accuracies down to 8-10 cm. GSOC is also participating in the IGS Real-Time Pilot Project, which started in October 2007, and submits the RETICLE clock products to be used in the context of the pilot project.
RETICLE System Overview
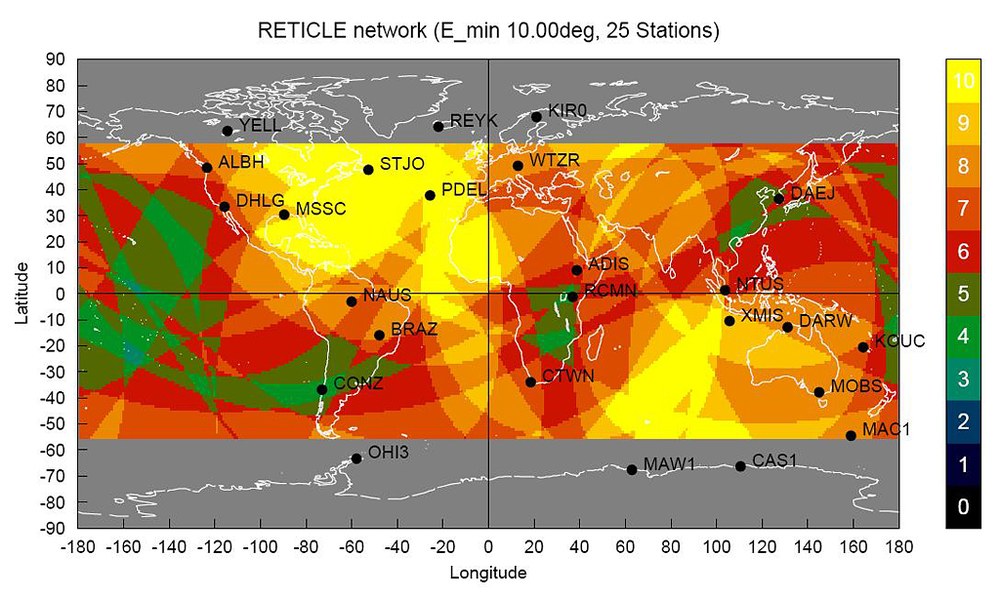
The software is based on a Kalman-Filter, which processes undifferenced code and carrier phase observations from a worldwide network of GPS stations. The real-time data is received via NTRIP (Networked Transport of RTCM via Internet Protocol). The system is capable of using streams in the RTCM2.x, RTCM3.x and RTIGS format, which are the most commonly used stream formats. The picture on the left depicts the reference station network, which is currently used for the orbit/clock product generation. The measurements of this network are transmitted to the RETICLE system with a typical latency of 2-3 seconds.
The filter uses the orbit information from the predicted part of the latest ultra-rapid IGS products. It estimates clock offsets and drifts for the complete GPS constellation, which are consistent with the interopolated IGU orbits. The estimation process is performed at 30 second intervals and the results for the satellite clocks are stored together with the interpolated orbits in SP3-files. Additionally, the information is accessible in real-time via an NTRIP-stream.
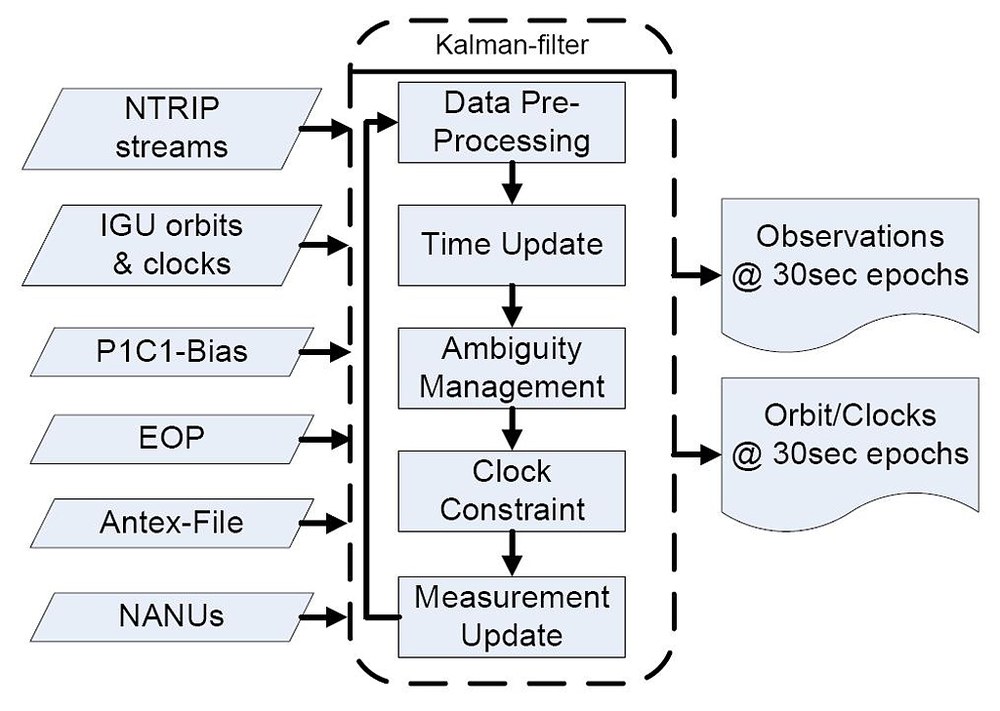
The picture on the right depicts an overview of the RETICLE system. Inputs to the estimation process are the real-time observations and the IGU predicted orbits, which are downloaded automatically every 6 hours. The P1C1-biases (differential code biases) must be used, because most real-time stations do not transmit the P1 observations due to format limitations. In order to be able to process ionosphere-free combinations formed from CA-P2 and P1-P2 consistently, the use of the P1C1-bias is necessary. It is downloaded from the CODE analysis center.
The position of the reference stations are taken from IGS Sinex-files and are not part of the estimation process. Earth-orientation parameter (EOP) are used for the computation of solid earth tides, which affect the position of the antenna reference point. The most recent IGS Antex-file is used to access the information about phase center offsets and phase center variations for each individual frequency. Finally, Notice Advisories for Navstar Users (NANUs) are used to exclude satellites subject to maneuvers or maintenances from the estimation.
The Kalman filter update cycle is performed every 30 seconds and comprises a clock constraint, which constrains the mean of the estimated clocks to the mean of the IGU predicted clocks. The output of the system are the clock estimates for GPS satellites, which are made accessible as SP3-files or in a real-time stream. The total latency from the measurement epoch until the clock estimation is available for the user is approximately 5 seconds.
Real-Time POD Results
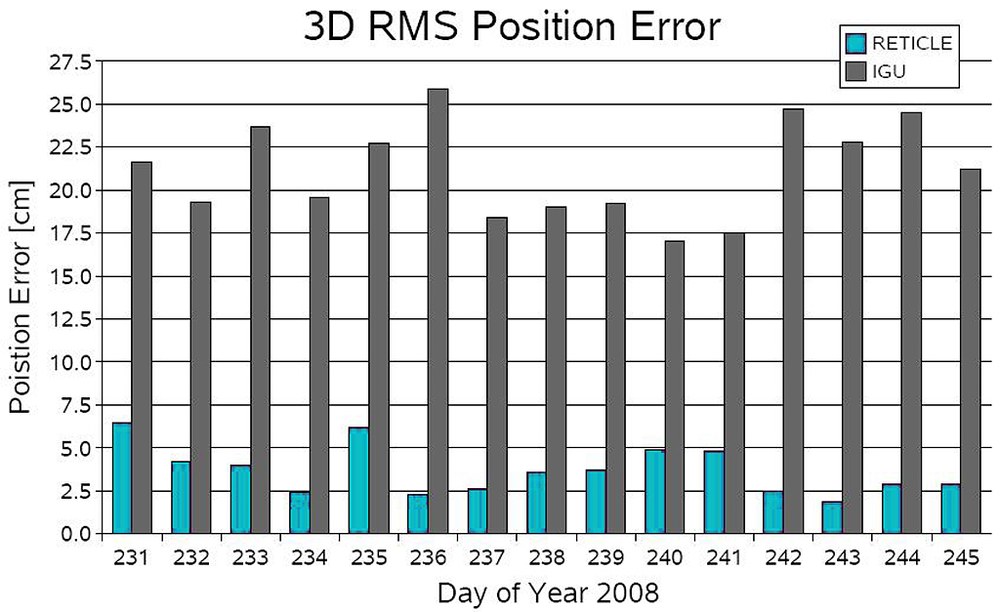
This picture depicts the precise orbit determination (POD) performance for the TerraSar-X satellite using the RETICLE products. POD results for an interval of 15 days are compared to a reference trajectory. The RETICLE products exhibit 3D RMS position errors between 2 cm and 6 cm. The IGU predicted products in comparison exhibits position errors between 16 cm and 26 cm. Since the GPS orbits information is identical in both cases, the increases in accuracy is interely caused by the improvement of the GPS clock information. Using estimated real-time clock information instead of predicted clocks, the decimeter accuracy requirements for POD of LEO satellites can be fulfilled.
Further Reading
Hauschild A., Montenbruck O.;
Real-time Clock Estimation for Precise Orbit Determination of LEO-Satellites;
ION-GNSS-2008 Conference; 16-19 Sept. 2008; Savannah, Georgia (2008).