Erinnern Sie sich daran, wann Sie das letzte Mal mit einem Flugzeug geflogen sind? Wenn Sie darüber nachdenken müssen, was für den Komfort in der Kabine auf diesem Fluge eine wichtige Rolle gespielt hat, stehen die Chancen gut, dass unter den Top Fünf der Kabinenlärm zu finden ist.
Kabinenlärm ist ein vibroakustisches Problem, d. h. der Lärm ist eine direkte Folge der unerwünschten Schwingungen des Flugzeugrumpfes. Es gibt mehrere Quellen, die zu den Rumpfvibrationen beitragen, z.B. die Schallabstrahlung des Triebwerks, die turbulente Grenzschicht, triebwerksbedingte Vibrationen usw. Daher ist das Verständnis dessen, was die Rumpfvibrationen verursacht und wie diese zum Kabinenlärm beitragen, ein entscheidendes Element der Forschung in der Vibroakustik.
Um die Energieausbreitung und die Schallabstrahlung des Rumpfes korrekt zu quantifizieren, ist es in der Regel erforderlich, Messungen mit einer räumlichen Auflösung von Messpunkten durchzuführen, die kleiner als die auftretende Wellenlänge ist. Für den interessierenden Frequenzbereich sind große Mengen von Messungen mit einem dichten Messgitter erforderlich. Für eine relevante Struktur, wie z.B. einen Flugzeugrumpf, bedeutet dies, dass Hunderte oder sogar Tausende von Punkten gemessen werden müssen. Obwohl dies technisch möglich ist, sind diese Art von groß angelegten Messungen sehr anspruchsvoll und zeitaufwendig. Dies gilt insbesondere für die Installationsphase des Experiments, in der zunächst jede Stelle der Struktur genau bestimmt und dann ein Sensor präzise installiert werden muss. Ein Verbindungskabel zwischen Sensor und Datenerfassungssystem muss verlegt werden. Ein Kabel pro Sensor, insgesamt Hunderte von ihnen.
Entwicklung unserer eigenen Werkzeuge
Das Interesse an vibroakustischer Forschung hat in den letzten zehn Jahren so stark zugenommen, dass diese Art von groß angelegten Messungen üblich geworden ist. Daher hat die Gruppe Vibroakustik am Institut für Aeroelastik schon vor Jahren damit begonnen, Testverfahren zu entwickeln, um diese Experimente zu vereinfachen und zu beschleunigen.
Ziel war es, ein automatisiertes System zu entwickeln, mit dem Rumpfschwingungen auf möglichst einfache Weise gemessen werden können. Wie es in der Forschung üblich ist, muss man bei der Entwicklung von etwas Neuem mehrere Iterationen durchlaufen, um das zu verbessern und zu verfeinern, was man gerade entwickelt. Nach einigen Jahren der Entwicklung und Erprobung wurde der Fuselage Laser Scanner (FLS) geboren. Er besteht aus einem Laser-Doppler-Vibrometer, Servomotoren, Spiegeln zur Beeinflussung des optischen Weges des Laserstrahls, einer CCD-Kamera zur Überprüfung der Laserpunktposition und zur Identifizierung von QR-Markern, einer Datenerfassungseinheit zur Messung der Schwingungsantwort und zur Steuerung der Anregung, einem Schwingungsisolationssystem und einer Steuereinheit, die nach der Konfiguration des Systems völlig autonom Messungen durchführen kann. All dies kombiniert mit der Fähigkeit, sich selbst innerhalb des Messgitters zu finden und zu positionieren, indem das FLS einen Satz von QR-Referenzmarkern verwendet, die auf der Struktur platziert sind.
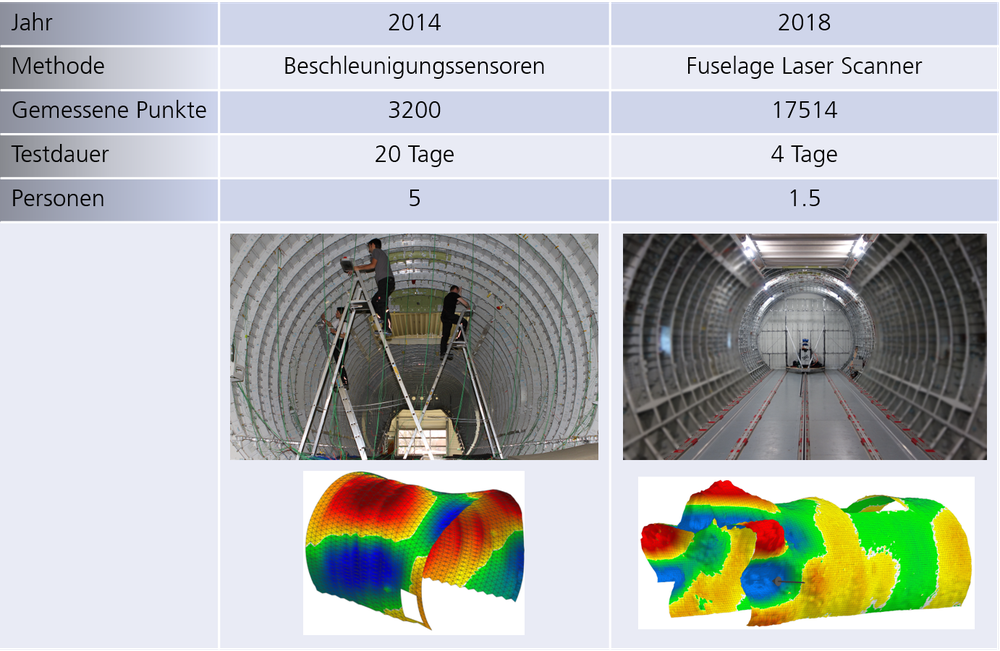
Seit Beginn der Entwicklung wurde das FLS mehrfach getestet, validiert und in Betrieb genommen. Damit bietet es einen erheblichen Vorteil gegenüber dem "klassischen" sensorgestützten Messverfahren, das in der Vergangenheit durchgeführt wurde. Um dies zu verdeutlichen, sollen zwei Messkampagnen verglichen werden. Beide wurden an derselben Struktur, dem Rumpf eines Airbus A400M, durchgeführt, wobei ein Abschnitt von 12,5m gemessen wurde. Wie man feststellen kann, ist die Verbesserung in allen Kategorien deutlich zu erkennen.
Vergleich der Methoden vibroakustischer Untersuchungen - Beschleunigungssensoren vs. Fuselage Laser Scanner
Die Fähigkeit des FLS, Rumpfschwingungen zu messen, ist ein bemerkenswerter Fortschritt in der modernen Messtechnik für vibroakustische Tests an Flugzeugrümpfen. Das FLS deckt nur einen Teil der Datenerfassung ab, die in der Forschung relevant ist. Es gibt eine Reihe anderer Themen, die in der Regel andere Arten von Daten erfordern, z. B. Schallabstrahlung, Energieübertragung und -dissipation usw. In solchen Fällen werden Sensoren wie Intensitätssonden, automatische Modalhämmer, Stereokamerasysteme usw. benötigt. Und was noch wichtiger ist, man muss näher an die Struktur herankommen, um angemessene entsprechende Messungen durchzuführen. Obwohl das FLS ein bemerkenswertes Instrument ist, wurde es nicht für die Durchführung all dieser Arten von Messungen konzipiert.
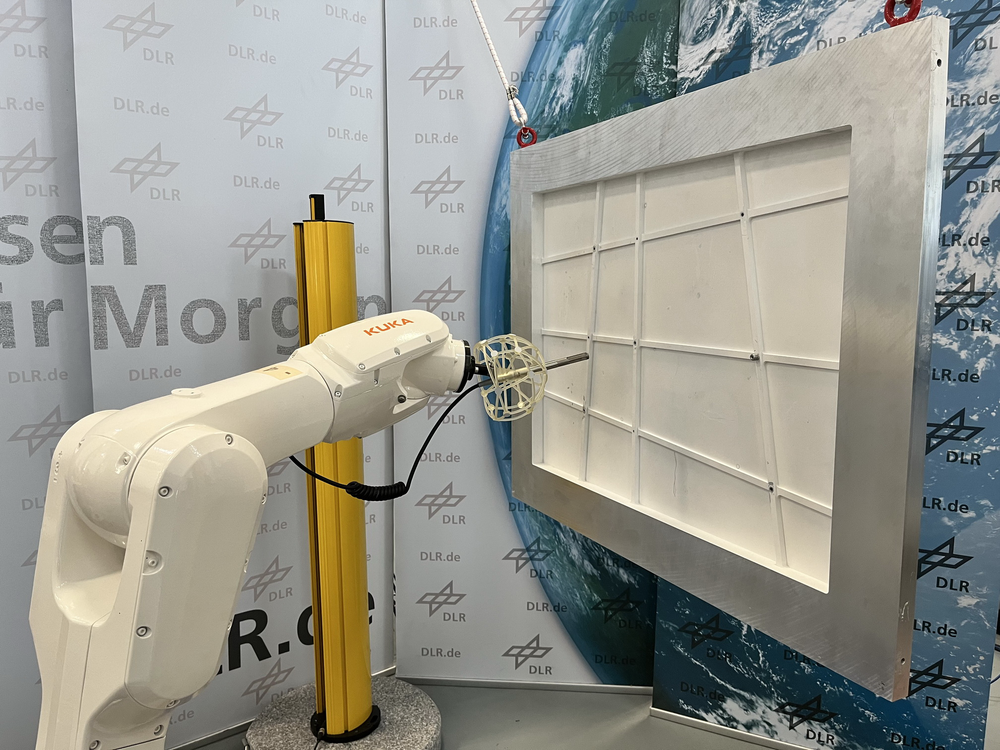
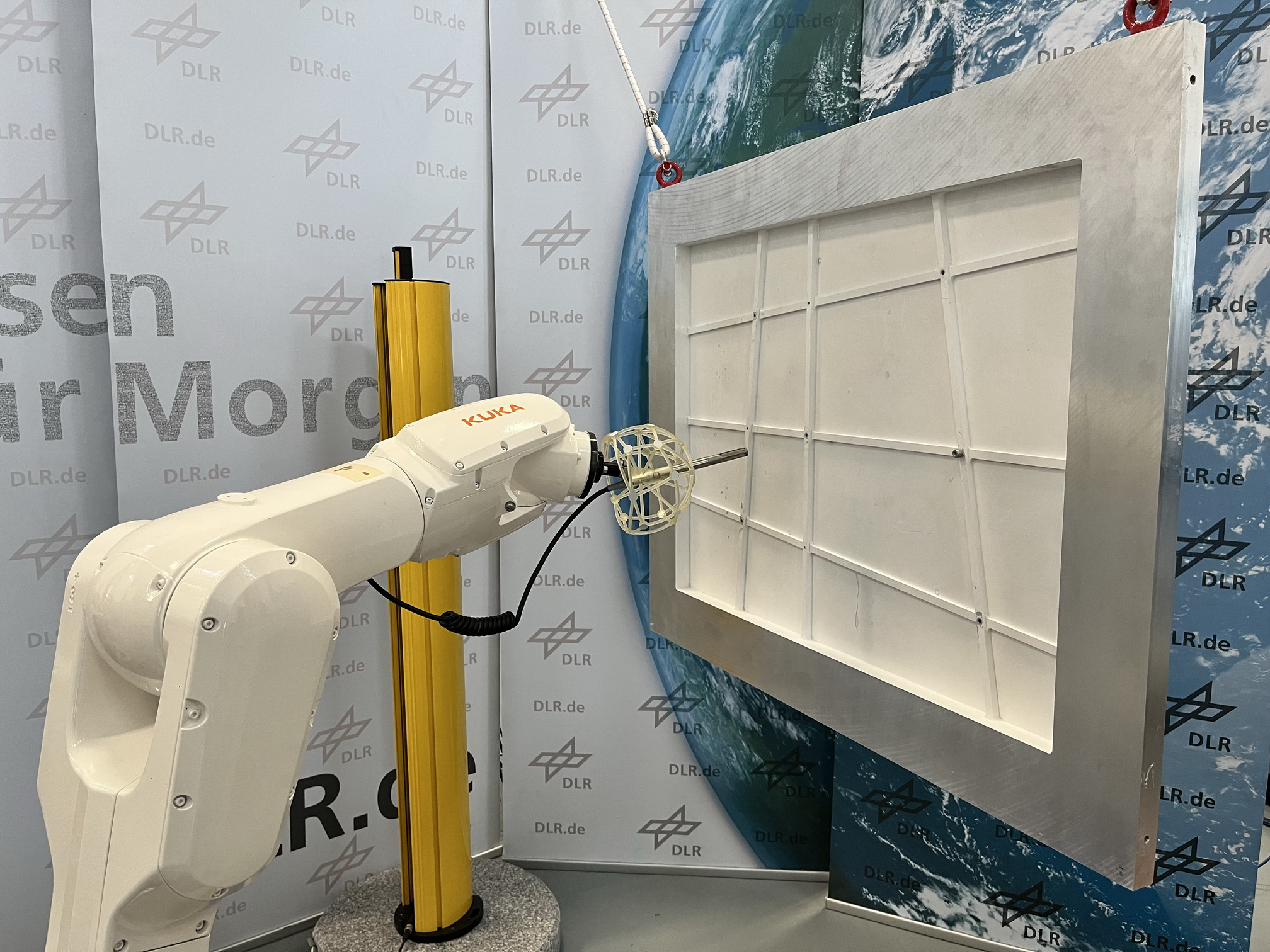
Wenn wir uns für die Zukunft ein neues Werkzeug vorstellen, das uns bei solchen Herausforderungen hilft und gleichzeitig genügend Flexibilität bietet, könnte ein Roboterarm all diese Anforderungen erfüllen. Mit einer solchen Plattform könnten wir je nach Bedarf verschiedene Sensoren anbringen, näher an die Struktur herankommen, fast beliebig geformte Messgitter abtasten und natürlich auch große Messungen automatisieren.
Mit dieser Idee im Hinterkopf haben wir mit der Entwicklung eines solchen Werkzeugs der neuen Generation begonnen. Die Hauptidee war, ein modulares System zu schaffen, das leicht zu bedienen ist, mit einem Datenerfassungssystem integriert werden kann und verschiedene Sensoren tragen kann. Wir befinden uns noch in einem frühen Entwicklungsstadium. Im Moment liegt der Schwerpunkt auf der Schaffung einer nahtlosen Schnittstelle für den Roboterbetrieb und die Steuerung durch einen externen Computer sowie auf der Gewährleistung einer korrekten Synchronisation zwischen Roboterbewegungen und Datenerfassung. All dies im Rahmen eines modularen Software-Designs. Derzeit wird dies mit einem kleinen Industrieroboter von der Stange umgesetzt. Ein solcher Roboter ist jedoch in vielen verschiedenen Größen erhältlich, sodass das Messverfahren leicht skaliert werden kann.
Vibroakustische Messungen mithilfe eines Roboterarms
Die nächsten Entwicklungsschritte konzentrieren sich auf die Gewährleistung einer ordnungsgemäßen Datenprotokollierung, die Online-Verarbeitung von Messdaten, die Robustheit und eine bessere Integration in unsere etablierten Testabläufe.




{kind=link}
{kind=link}