"It has been raining for days and the usual routes in South Sudan are no longer passable. A new route has to be chosen for the World Food Programme (WFP) food delivery, which can be dangerous for human drivers. The AHEAD team is therefore contracted by WFP to deliver food to a remote village in South Sudan using a remote SHERP without a driver."
The scenario for the final demonstration on Nov. 9, 2022, at the DLR site in Oberpfaffenhofen was based on this future potential use case. The SHERP was first loaded at the starting point. In the GMOC (Global Mission Operation Center), the overall mission was planned and important information was provided to the LMOC (Local Mission Operation Center) to control the SHERP from there. After two years of the AHEAD project (Autonomous Humanitarian Emergency Aid Devices), all technical components of the mission were successfully tested for the first time.
The GMOC can operate worldwide and be stationed at a central location, far away from the individual mission sites. In the long term, it could even be located at WFP headquarters. During the development and demonstration phase of AHEAD, a prototype operations center was established at ZKI to develop initial concepts and test elements of the GMOC. The main tasks are to perform the pre-planning of the mission, the overall management of the mission operations as well as the evaluation of the missions and to accompany them by means of up-to-date situation maps and assessments (based on earth observation and other geo-data). The situation picture of the GMOC should provide all relevant geo-information of the mission region, starting with an overview of the topography of the region, characteristics of potential routes up to semantic data layers, e.g. crisis information (floods) or relevant objects in the course of the truck route (obstacles, houses or bridges). In addition, the situation picture will also be used in the future for planning communication, e.g. coverage of the radio link, between LMOC and truck.
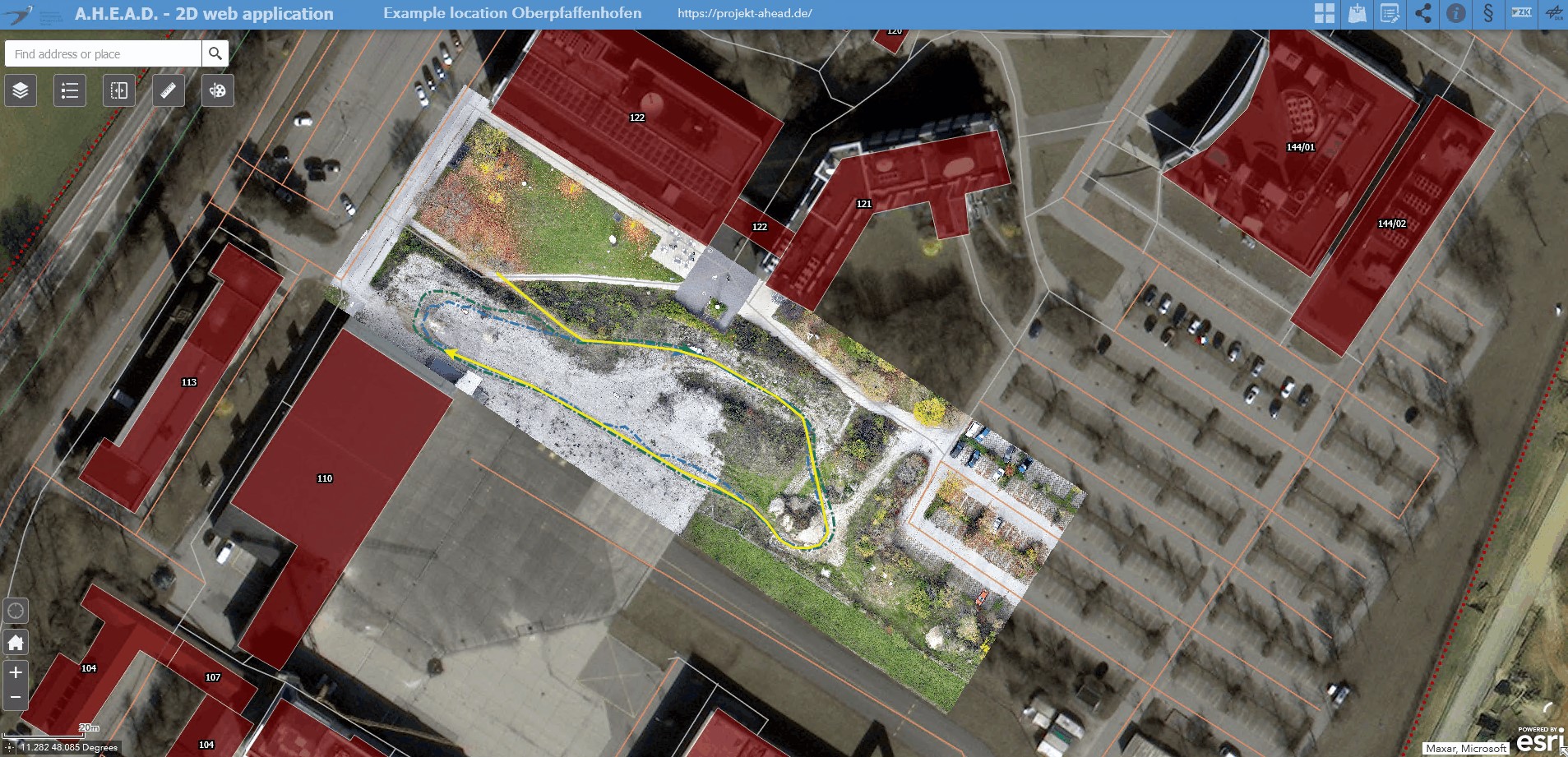
To support these tasks, an interactive 2D situation image was developed accordingly. In the web-based viewer, geospatial basis data, satellite data, up-to-date drone data and digital terrain models of the test site in Oberpfaffenhofen were combined. On the one hand, this visualization allowed for an interactive exploration of the area which had to be driven through. On the other hand, a possible route for the truck was planned based on this information and automatically transmitted to the LMOC. In turn, the live position of the truck could be directly transferred from the LMOC to the 2D situation image of the GMOC, integrated and displayed in near-real time. GMOC and LMOC are thus in permanent exchange with each other.
In addition to the participating project partners, first and foremost the World Food Programme (WFP) and the DLR institutes RM (Institute of Robotics and Mechatronics), KN (Institute of Communication and Navigation), DFD/ZKI (German Remote Sensing Data Center), TS (Transportation Systems), as well as the industrial partners Roboception GmbH, Sensodrive GmbH and Blickfeld GmbH, other potential end users, such as the Bavarian Red Cross (BRK), German Federal Agency for Technical Relief (THW), German Rescue Robotics Center (DRZ) and the Institute of the Fire Brigade NRW participated.
Das Team der Sicherheitsforschung des BRK, Landesgeschäftsstelle München konnte zudem vor Ort einen detaillierten Einblick in den technischen Aufbau der Systeme gewinnen und wird das Nachfolgeprojekt MaiSHU (Multimodale Wahrnehmung und Mensch-Maschine-Schnittstellen teilautonomer intelligenter Systeme für humanitäre Hilfe in unsicheren und unstrukturierten Umgebungen) als Anwendungspartner begleiten und in Zukunft in einsatznahen Bedingungen erproben.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}