Surface Avatar – Remotely controlling robots from space to complete tasks and explore other worlds
| Space
Surface Avatar – Remotely controlling robots from space to complete tasks and explore other worlds
View of the DLR GSOC control centre – astronaut Jeanette Epps operates Rollin' Justin
On the left screen, our team at the German Space Operations Center (GSOC) follows US NASA astronaut Jeanette Epps aboard the International Space Station (ISS) as she operates Rollin’ Justin during sample-tube handling.
Last week, we made exciting technical progress with the remote control of a team of robots from space. On 9 and 10 July 2024, under the leadership of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and in collaboration with the European Space Agency (ESA), we successfully completed another part of our Surface Avatar telerobotics mission on the International Space Station (ISS). To achieve this, NASA astronauts Tracy 'TC' Dyson and Jeanette Epps, working from the ISS in tandem with ground control, remotely operated a team of robots placed in a simulated Mars environment at DLR's site in Oberpfaffenhofen. The aim of Surface Avatar is to research new technologies required to control teams of robots for exploration, assembly and maintenance in space.
The idea is to provide astronauts with a user-friendly console, equipped with various operator tools such as visual displays, force and tactile feedback and an intuitive graphical user interface. A console like this would serve as an extension of the astronaut's body by delegating tasks to a robot, an intelligent helper capable of carrying out simple tasks. This concept is called scalable autonomy.
With scalable autonomy, astronauts can flexibly decide if they wish to carry out a task themselves or delegate it to robots. They could also decide to delegate a task to one robot while operating another, allowing the execution of bigger and more complex operations, not only on the ISS but later also on the surface of the Moon or Mars.
On this occasion, we had two full days with the ISS crew to continue our tests with the Surface Avatar. We used this time to test the remote handling of soil probes with three different experiments involving multiple robots, all of which have unique capabilities. During one experiment with sample tubes, we investigated how a robot could communicate with humans about its tasks. It was particularly interesting to see if and how the robot communicated with the astronaut when it could not carry out a task, and to observe how the astronaut could then help the robot find a solution. This is of particular importance for problem solving and bug fixes during space missions, as support from mission control on Earth is limited due to communication delays as signals take time to travel vast distances.
Bert the four-legged robot – DLR's walking 'search dog' for exploring alien worlds
DLR's walking robot, Bert, investigates a point of interest on an unfamiliar planet – a simulation at the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen.
From the ISS, TC and Jeanette also explored the simulated planetary environment on the ground using DLR's four-legged friend Bert. This diminutive robot was used by the astronauts to find small objects, pick them up from the surface and store them safely, impressively demonstrating the incredible versatility and adaptability of such machines.
Most of the time during the two-day session was spent picking up and handling rock samples. In a possible world first, the ISS crew operated multiple robots simultaneously, including ESA’s Interact rover and DLR's Rollin' Justin. Switching between direct control and supervised autonomy meant rock samples could be collected from various locations, which the robots then stored and handed over for analysis.
The ESA Interact rover brings a rock sample to the landing module
A focal point of the Surface Avatar session was collecting and handling rock samples. Here we see the ESA Interact rover (right) and DLR's Rollin' Justin (left).
The capacity to control multiple robots in parallel and in a coordinated manner is an important step for future missions that require the execution of complex tasks under extreme conditions.
Our ISS crew members TC and Jeanette did an incredible job at mastering these tasks, which were some of the most challenging telerobotics operations to date. In the end, they were able to complete all tasks, gain valuable insights in the process and last but certainly not least, have fun in the process. These positive experiences are not only important to the success of the current mission, but will also serve future missions such as Artemis, during which colleagues may choose to deploy these technologies and robots on the Moon. We have now completed two main experiments for Surface Avatar and completed the fifth mission with the ISS. We are confident that through the insight and progress made, we will continue to be at the forefront of space robotics and push the boundaries of what is possible in space.
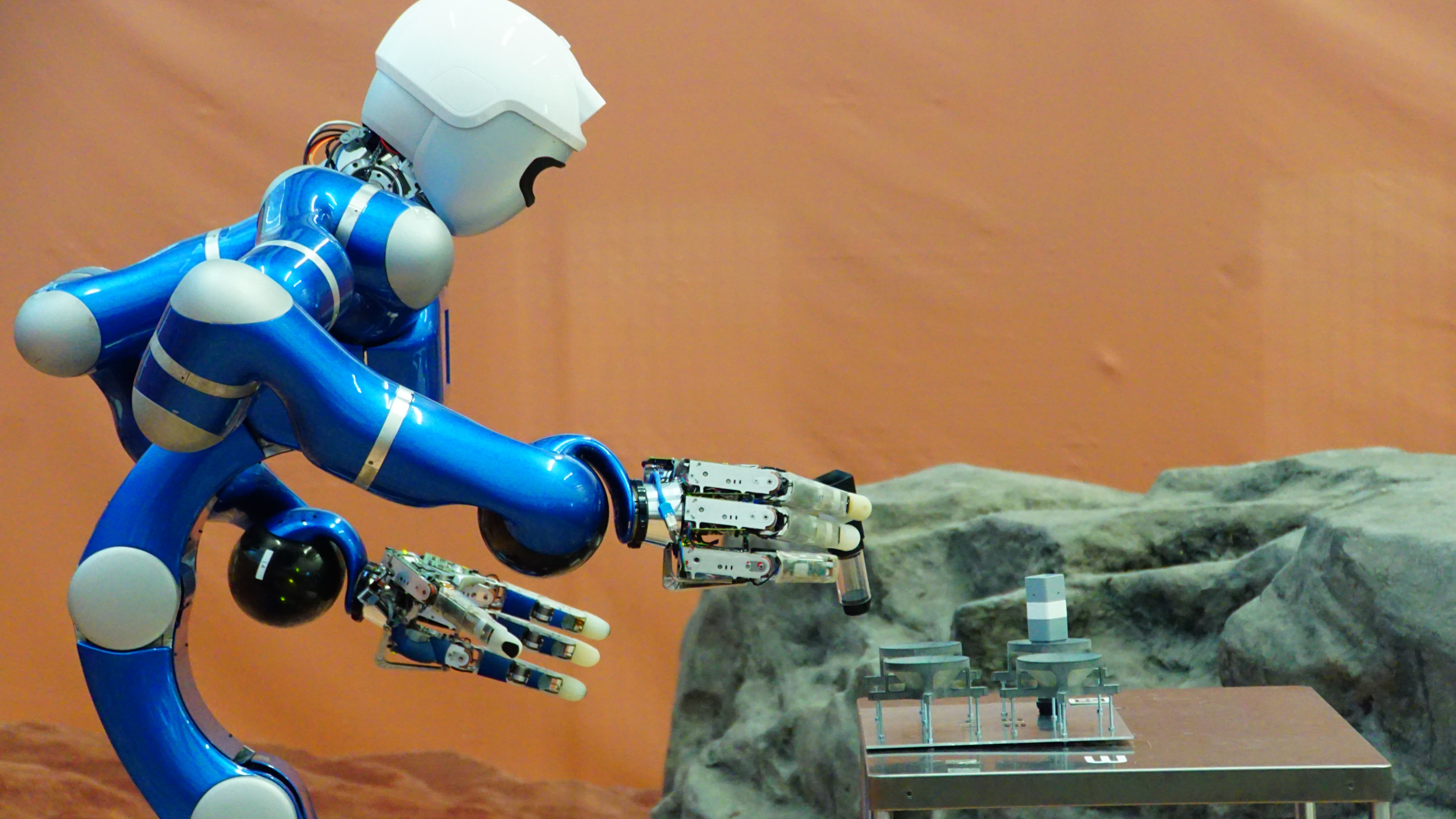
DLR's Rollin' Justin robot handles a sample tube
A key experiment of the Surface Avatar session focused on the handling of sample tubes, while the team also investigated how the robot communicates with humans about its tasks.






{kind=link}
{kind=link}
{kind=link}