Auf dem Monitor links verfolgt unser Team des GSOC (Deutsches Raumfahrt-Kontrollzentrum bzw. German Space Operations Center, kurz GSOC) die US-amerikanische NASA-Astronautin Jeanette Epps an Bord der Internationalen Raumstation ISS, wie sie Rollin‘ Justin beim Handling des Probenröhrchens steuert.
Letzte Woche haben wir einen spannenden technologischen Fortschritt bei der Steuerung eines Roboterteams aus dem Weltraum gemacht. Unter der Leitung des Deutschen Zentrums für Luft- und Raumfahrt (DLR) und in Zusammenarbeit mit der Europäischen Weltraumorganisation ESA haben wir am 9. und 10. Juli 2024 einen weiteren Teil unserer Telerobotik-Demonstrationsmission „Surface Avatar“ auf der Internationalen Raumstation ISS erfolgreich abgeschlossen. Die NASA-Astronautinnen Tracy „TC“ Dyson und Jeanette Epps arbeiteten dazu eng mit uns am Boden zusammen. Unsere ISS-Crew steuerte aus der Ferne des Erdorbits ein Team von Robotern in einer simulierten Marsumgebung auf dem DLR-Gelände in Oberpfaffenhofen. Ziel von Surface Avatar ist es, neue Technologien zu erforschen, die wir brauchen, um Roboterteams für Erkundungs-, Montage- und Wartungsaufgaben im Weltraum zu steuern.
Die Idee besteht darin, Astronautinnen und Astronauten künftig eine benutzerfreundliche Konsole mit verschiedenen Rückmeldungen wie visuellen Anzeigen, Kraft- und Tastempfindungen sowie einer intuitiven grafischen Benutzeroberfläche zur Verfügung zu stellen. Mit einer solchen Konsole können sie die Roboter sozusagen wie eine Verlängerung ihres eigenen Körpers steuern oder die Roboter als intelligente Helfer nutzen, indem sie einfache Aufgaben an die Roboter delegieren. Dieses Konzept nennt man skalierbare Autonomie.
Mit dieser skalierbaren Autonomie können die Astronauten flexibel entscheiden, ob sie selbst eine Aufgabe übernehmen oder an die Roboter abgeben. Sie könnten einem Roboter eine Aufgabe zuweisen und gleichzeitig einen anderen Roboter steuern. Dadurch können sie größere und komplexere Aufgaben mit den Robotern auf der ISS und später auch auf der Mond- oder Marsoberfläche bewältigen.
Wir hatten diesmal ganze zwei Tage, mit der ISS-Crew die Surface Avatar-Testreihe fortzusetzen. Die Zeit nutzen wir für die ferngesteuerte Handhabung von Bodenproben. Es gab drei verschiedene Versuche mit mehreren Robotern, die unterschiedliche Fähigkeiten haben. In einem Experiment zur Handhabung von Probenröhrchen haben wir untersucht, wie ein Roboter über seine Aufgaben mit dem Menschen kommunizieren kann. Besonders interessant war, dass und wie der Roboter dem Astronauten mitteilt, wenn er eine Aufgabe nicht ausführen kann, und wie der Astronaut dem Roboter helfen kann, eine Lösung zu finden. Dies ist besonders wichtig für Problemlösungen und Fehlerbehebungen bei Weltraummissionen. Bei diesen ist die Unterstützung durch eine Missionskontrolle auf der Erde aufgrund der langen Signallaufzeit oft nur eingeschränkt möglich.
Laufroboter Bert bei der Erkundung einer „fremder Welt“
DLR-Laufroboter Bert untersucht einen sogenannten Point-of-Interest auf dem „fremden Planeten“ – noch beim DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen
TC und Jeanette erkundeten von der ISS aus auch die „Planeten-Umgebung“ am Boden mit dem DLR-Vierbeiner Bert. Der kleine Roboter wurde von den Astronautinnen genutzt, um kleine Objekte zu finden und zu erreichen. Anschließend hob er die Objekte von der Oberfläche auf und verstaute sie sicher. Bert demonstrierte eindrucksvoll, wie vielseitig und anpassungsfähig solche Maschinen in unterschiedlichen Umgebungen sein können.
Die meiste Zeit wurde mit dem Aufheben und Handhaben von Gesteinsproben verbracht. In einer möglichen Weltneuheit steuerte unsere ISS-Crew mehrere Roboter gleichzeitig, darunter den Interact Rover der ESA und Rollin' Justin des DLR. Durch das Wechseln zwischen direkter Steuerung und überwachter Autonomie sammelten die Roboter Gesteinsproben von verschiedenen Orten, übergaben die Proben und verstauten sie zur Analyse.
ESA-Rover Interact bringt eine Gesteinsprobe zum Landemodul
Ein Schwerpunkt der Surface-Avatar-Session wurde dem Aufheben und Handhaben von Gesteinsproben gewidmet. Hier ist der Rover Interact der ESA (rechts) und Rollin' Justin des DLR (links) zu sehen.
Die Fähigkeit, mehrere Roboter parallel und koordiniert zu steuern, ist ein wichtiger Schritt für zukünftige Missionen, bei denen komplexe Aufgaben unter extremen Bedingungen durchgeführt werden müssen.
Mit einigen der bisher herausforderndsten Telerobotik-Aufgaben haben unsere ISS-Crewmitglieder TC und Jeanette großartige Arbeit geleistet. Am Ende konnten sie alle Aufgaben erfolgreich ausführen und dabei wertvolle Erkenntnisse gewinnen. Besonders erfreulich ist, dass sie dabei auch viel Spaß hatten. Diese positiven Erfahrungen sind nicht nur wichtig für den Erfolg der aktuellen Mission, sondern werden ihnen auch bei zukünftigen Missionen wie Artemis helfen, bei denen sie beziehungsweise ihre Kolleginnen und Kollegen diese Technologien und Roboter auf dem Mond einsetzen werden. Wir haben nun das zweite Hauptexperiment von Surface Avatar und die insgesamt fünfte Session mit der ISS absolviert. Mit den gewonnenen Erkenntnissen und den Fortschritten, die wir gemacht haben, sind wir zuversichtlich, dass wir weiterhin an der Spitze der Weltraumrobotik stehen und die Grenzen dessen, was im Weltraum möglich ist, weiter verschieben können.
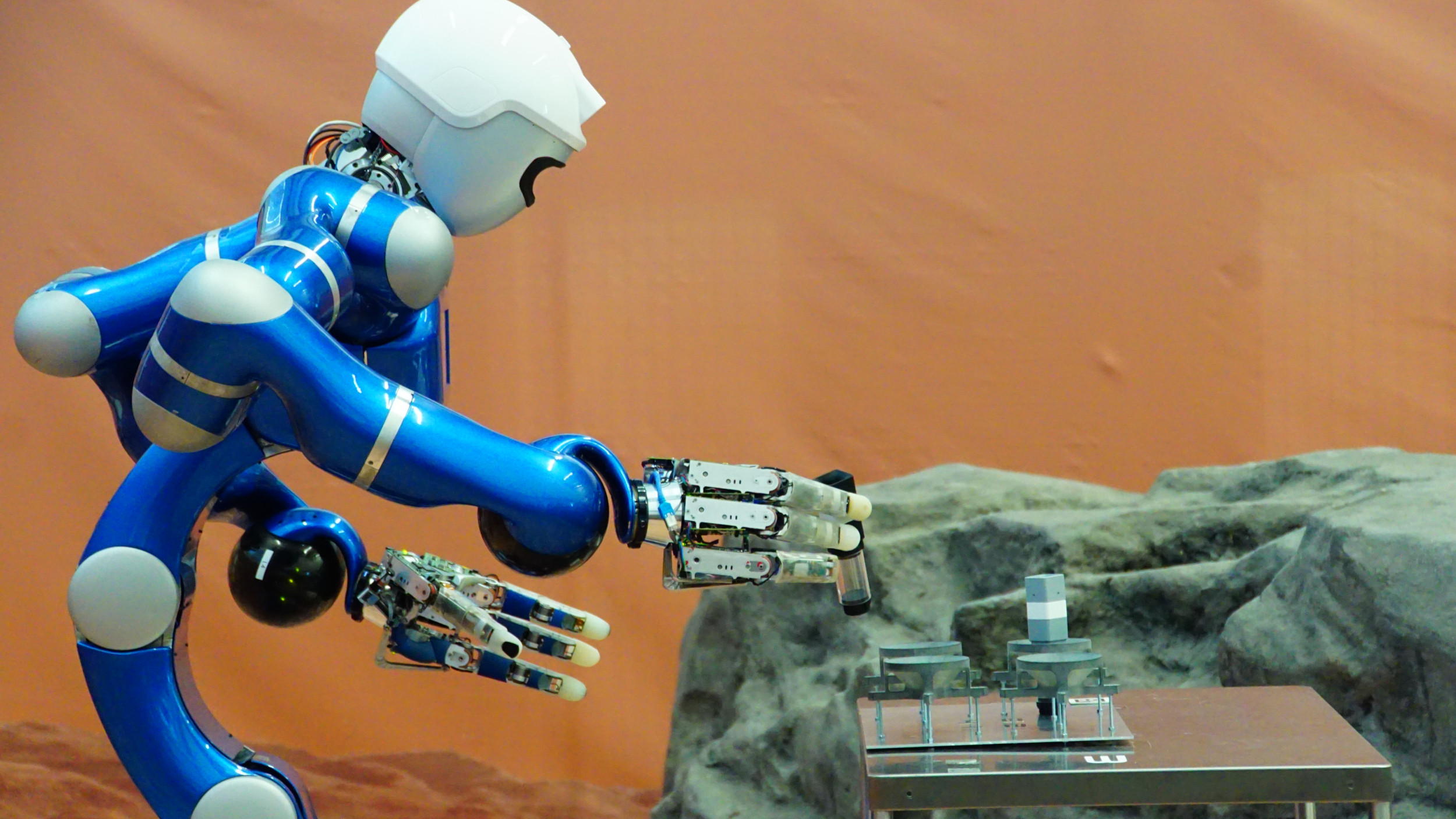
DLR-Roboter Rollin‘ Justin hält das Probenröhrchen
Ein wichtiges Experiment der aktuellen Surface-Avatar-Session beschäftigte sich mit der Handhabung von Probenröhrchen und das Team untersuchte, wie ein Roboter über seine Aufgaben mit dem Menschen kommunizieren kann.






{kind=link}
{kind=link}
{kind=link}