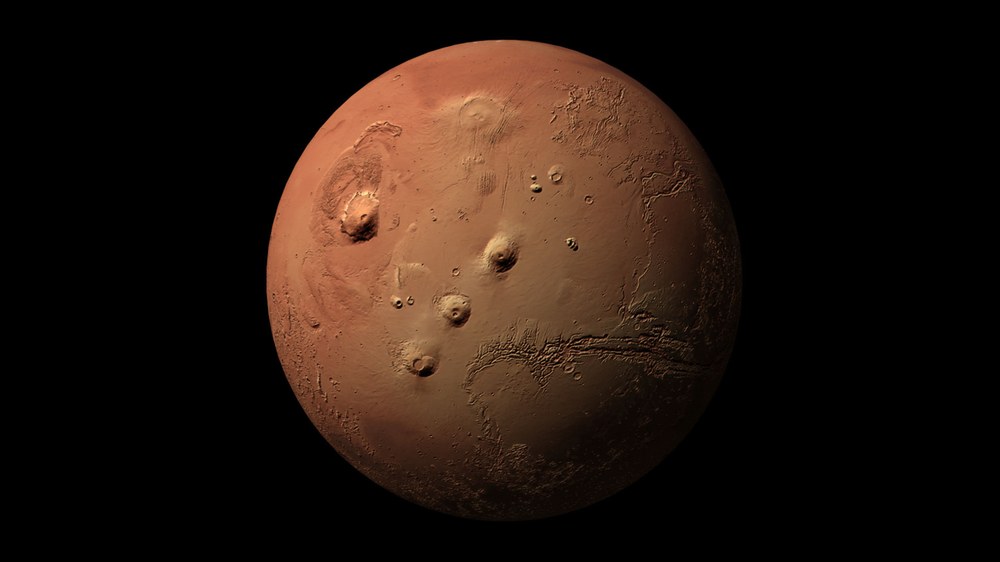
Der Planet Mars. In der Bildmitte ist das Tharsisgebirge mit drei erloschenen Vulkanen zu erkennen. Links davon Olympus Mons, der höchste Vulkan unseres Sonnensystems.
Credit:
ESA/DLR/FU Berlin, G. Neukum.
Mars, der äußere Nachbar der Erde, ist den Menschen schon in der Antike wegen seiner rötlichen Färbung aufgefallen. Sie ordneten diesen Himmelskörper dem Kriegsgott zu. Nachdem vor mehr als 50 Jahren Menschen auf dem Mond gelandet sind und nun im Projekt Artemis die Rückkehr zu unserem Trabanten ansteht, wäre der Mars ein mögliches nächstes Ziel für Astronautinnen und Astronauten.
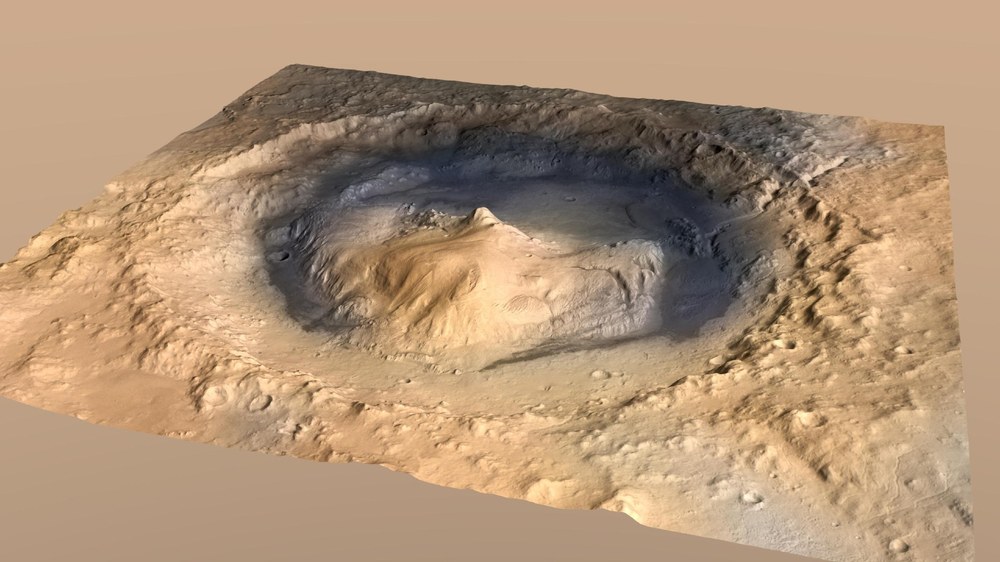
Der Gale-Krater
Landeplatz und Untersuchungsgebiet des Mars-Rovers Curiosity
Credit:
NASA/JPL - Caltech/ESA/DLR/FU Berlin/MSSS
Bevor man Menschen auf die Reise zum Mars schickt, muss man die Bedingungen, die sie dort erwarten, genau erkunden. Zahlreiche Sonden haben in den letzten 50 Jahren den Mars umkreist und genaue Bilder der Oberfläche zur Erde gefunkt. Man kann heute Marsgloben herstellen, die ebenso genau sind wie ein Globus der Erde.
Aber nicht alles kann man aus großer Höhe untersuchen. Roboter, sogenannte Mars-Rover, wurden auf der Oberfläche abgesetzt; beispielsweise im August 2012 „Curiosity" und im Februar 2021 „Perseverance“. Sie erforschen unter anderem die spannende Frage, ob es einmal Leben auf dem Mars gab oder vielleicht sogar noch gibt.
Wie steuert man solche Roboter? Wie bringt man sie dazu, die vorgesehenen Untersuchungen von Bodenproben an den richtigen Stellen durchzuführen? Und wie verhindert man, dass sie sich zwischen Felsen verkeilen oder in ein Loch fallen?
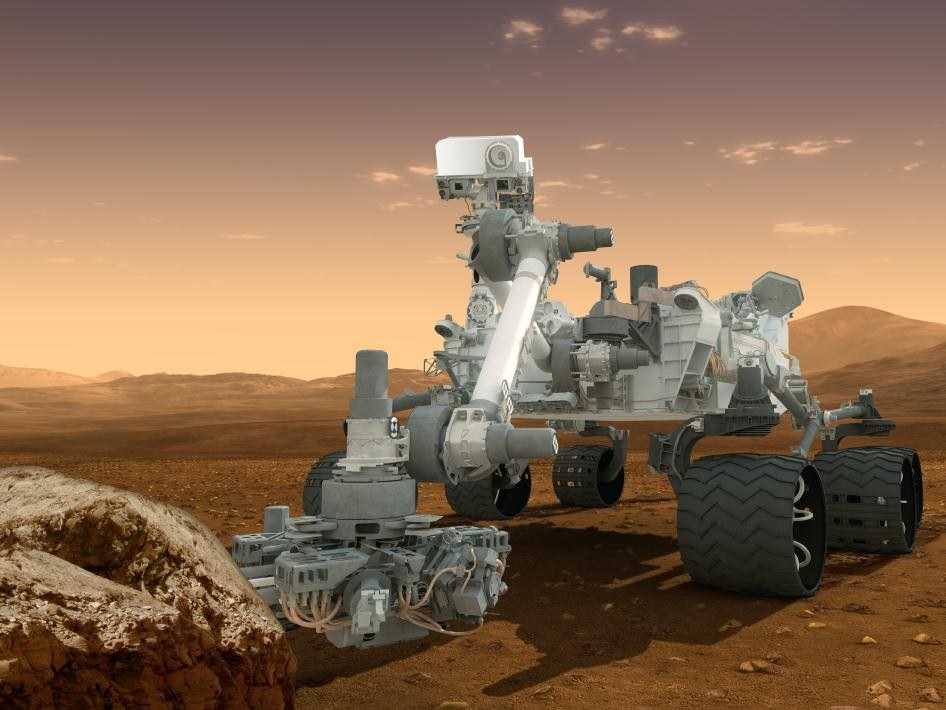
Mars-Rover Curiosity
Der Mars-Rover Curiosity ist ein fahrendes Laboratorium. Er soll unter anderem der Frage nachgehen, ob auf dem Mars einmal lebensfreundliche Bedingungen geherrscht haben.
Credit:
NASA/JPL - Caltech
Im Experiment werdet ihr sehen, dass es gar nicht so einfach ist, einen Mars-Rover zu steuern und sich dabei in unbekannter Umgebung zurechtzufinden, wenn man nur durch die „Augen" des Roboters sehen kann. Noch schwieriger wird es, wenn wir die Steuersignale mit nur wenigen Sekunden Verzögerung aussenden.
Bei bis zu 20 Minuten Verzögerung, die die Funksignale von der Erde zum Mars benötigen, ist die Steuerung in Echtzeit nicht mehr möglich. Der Roboter muss darum regelmäßig mit Aufgabenpaketen für die nächsten Tage versorgt werden, die er mit Hilfe „intelligenter“ Systeme abarbeiten kann.