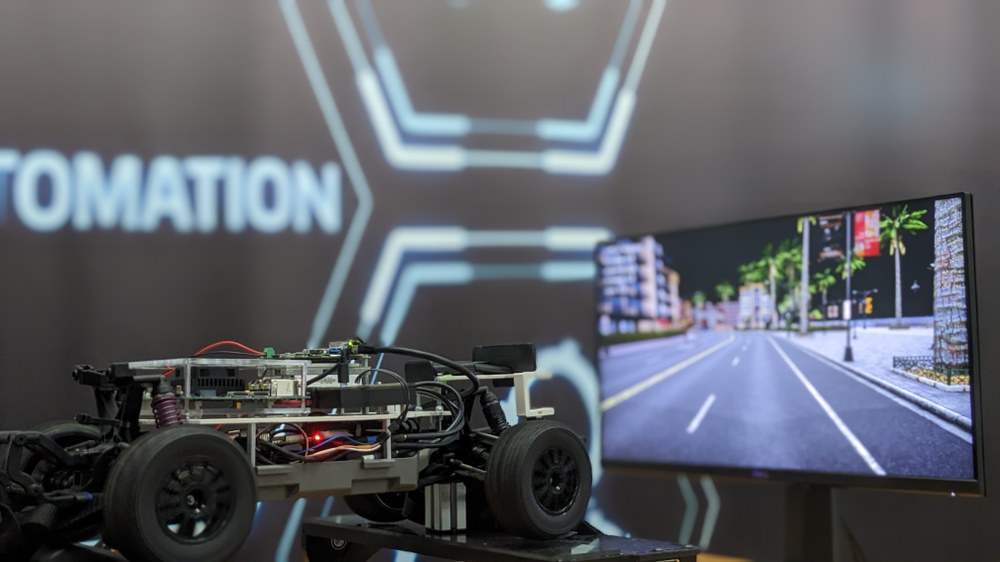
The Automotive Model Demonstration Evaluation and Verification Bed (AMDEV-Bed) is a development and demonstration environment consisting of a physical model vehicle with the necessary sensors and actuators on a chassis dynamometer, a simulation environment and a presentation monitor.
The vehicle has an embedded system that is also used in real vehicles. A wide variety of implementations of safety-critical driving functions can be carried out. The chassis dynamometer simulates the physical characteristics and driving conditions so that the vehicle can be operated in a controlled environment. At the same time, a simulation environment (CARLA) is run on a powerful computer.
With the help of CARLA, an open source simulation environment, urban scenarios, traffic conditions and various weather conditions are created and executed. Bidirectional communication takes place between the model vehicle and the simulation environment. The control commands of the vehicle actuators are transmitted to CARLA in real time, while, conversely, perception information from the simulation is processed by the model vehicle using real sensors. This interaction takes place via a special interface (e.g. using ROS 2).
Coupling with a simulation environment such as CARLA on a chassis dynamometer offers several advantages. It enables the simulation of complex and realistic traffic conditions that would be difficult to reproduce in the real world. By combining it with the chassis dynamometer, the physical behavior of the vehicle can be precisely tested and analyzed under a wide range of conditions.
The use of such a simulation creates a safe and controlled environment in which prototype driving functions can be implemented and tested before they are integrated into real vehicles. This allows potential errors or undesirable behavior to be detected and rectified at an early stage without the risk of real accidents.
The presentation monitor offers the opportunity to present internal processes graphically and didactically and bring them closer to an audience.
The following use cases can be demonstrated, evaluated or even verified with the help of the AMDEV-Bed.
UseCase Secure Updates:
Future vehicles will become increasingly complex as part of the transformation to software-defined vehicles (SDV). The frequency of regular updates is constantly increasing. Even today, errors in such updates lead to considerable costs and complex recall campaigns. If updates are to be carried out while a vehicle is in operation in the future, the requirements for this process will increase considerably. This is because these updates must be guaranteed to function reliably and be carried out at exactly the right time.
In this use case, an update process including a reference architecture for modular software updates is presented using a lane detection system. A software update management system checks in advance whether the computing platform in the vehicle has the necessary resources for the update, such as sufficient computing power and storage space. If these requirements are met, the new function is transferred to the vehicle's computing platform and installed there. Before the new function is put into operation, further runtime tests are carried out directly in the vehicle. The function can only be activated and used once these tests have been successfully completed.
UseCase Reinforcement Learning:
The CARLA simulation environment is regarded as a training environment for reinforcement learning. In this environment, the model vehicle can run through different scenarios, such as city traffic, motorway driving or parking manoeuvres. The RL agent interacts with the simulation environment and learns by simple trial and error which actions lead to the greatest success in different situations. Training takes place in iterations, with the agent continuously improving its strategies. As the simulation can run faster than real time, training in the virtual environment is more efficient than in the real world.