
On Orbit Servicing and Autonomy

The On-Orbit Servicing and Autonomy team develops cutting-edge technology for autonomous orbital rendezvous as well as for on-board data analysis and real-time information of end users on ground. In the area of rendezvous, the group provides novel algorithms and guidance, navigation and control architectures in the form of safety-critical, hardware-in-the-loop-tested flight software alongside ground software and operational procedures. The group handles the most difficult scenarios like on-orbit servicing or active debris removal. In the area of on-board data analysis, the group offers a flexible framework for diverse software applications that need easy integration into a satellite platform as well as 24/7 end user communication.
Research Topics
GNC-Concepts for the Rendezvous-Phase
- Camera-based Navigation
- Time of Flight Sensor Navigation (PMD, LIDAR)
- Development of Approach-Concepts and GNC Systems
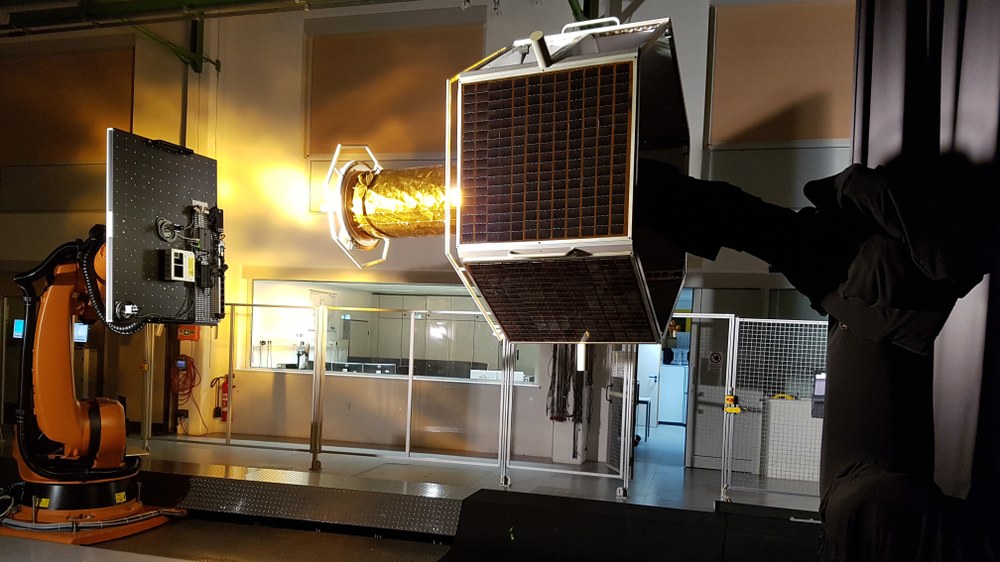
Hardware in the Loop RvD Simulation
- EPOS 2.0 – Robotic RvD-Simulator
- Closed Loop Rendezvous Simulation in Real-Time
- OOS End-to-End Simulation
- Verification and Test of Rvd Sensors and Systems
- Testcampaigns with Internal and External Partners
Intelligent On-board Processing of Earth Observation Data
- VIMOS – Verification of IMage analysis Onboard a Spacecraft
- OBC-NG – On-Board-Computer Next Generation
- AMARO - Autonomous Real-time Detection of mobile maritime Objects
- ScOSA - Scalable On-Board Computing for Space Avionics
Completed Projects and Studies
- VIBANASS – Vision Based Navigation Sensor System
- FOSTERNAV – Flash Optical Sensor for Terrain Relative Robotic Navigation
- iBOSS – intelligent Building blocks for On-orbit Satellite Servicing
- PRISMA – Prototype Research Instruments and Space Mission technology Advancement
- DEOS – German Orbital Servicing Mission
- OLEV – Oribital Life Extension Vehicle