
The InSight mission logbook (February 2019 - July 2020)

In his logbook, Instrument Lead Tilman Spohn who is back in Berlin since April and communicating with JPL via the web, gives us the latest updates regarding the InSight mission and our HP3 instrument - the 'Mole' - which will hammer into the Martian surface.
+++++ From August 2020 onwards, all InSight updates will be published as individual posts on the DLR blog. Overview +++++
Logbook entry 7 July 2020
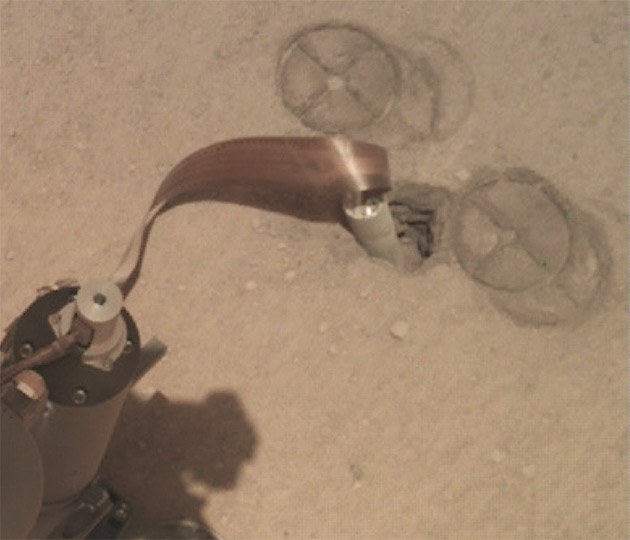
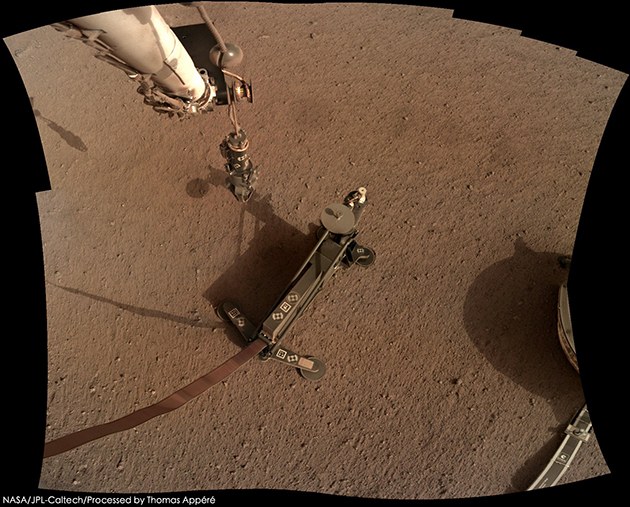
On Saturday 20 June 2020 (Sol 557 on Mars), the team completed the 'Free Mole Test' announced in my previous blog post. The result was not quite what we had optimistically hoped for, but was also not entirely a surprise. The 'Mole' started bouncing in place after making some progress without direct support from the scoop on 13 June (Sol 550).
We have no direct observations of the Mole's movement or measurements of its progress. Rather, we judge this from the motion of the tether, or more precisely, from the apparent motion of features on the tether with respect to the background. The images clearly show that the tether moved back and forth and eventually stopped altogether, suggesting that the Mole did not dig further down on its own.
The 'Free Mole Test' had already started on the previous Saturday, 13 June (Sol 550), but the evidence at that time for the Mole progressing downward during 125 hammer strokes was too ambiguous to be readily accepted. As you can see from the video clip below, the scoop initially went down pushing on the back-cap of the Mole and was further pressed into the sand by the arm. In the middle of the video clip, the scoop stopped moving and the dust particles in the scoop came to rest while the tether kept moving to the right by a few millimetres. This clearly suggested that the Mole had moved away from the scoop and had progressed downwards on its own. The tiltmeter showed the Mole becoming somewhat more upright, which is supporting evidence, and the short-period seismometer showed a change in the frequency characteristics of the recorded hammer signal. The tether apparently reversed motion a few frames later, before going on to move to the right. It then made a very small move to the left again before it finished while moving forward. A careful analysis of the images showed that the net forward motion of the tether (and the Mole?) was two to three millimetres. The integrated motion may have been three to five times as much!
When the team analysed the images on the following Monday, they were pleased to see the Mole moving forward but agreed that at least another hammering cycle was required before we would be willing to conclude that the Mole was in the ground deep enough to dig on its own. 'Dig on its own' is admittedly not quite technically accurate, as we were still aiming to provide indirect support by pressing the scoop onto the surface, thereby intending to increase the pressure on the Mole and the friction on its hull. Of course, we could not say how much we helped the Mole that way as we do not know the mechanical properties of the duricrust well enough.
On Sunday 21 June, when we looked at the images that had been sent to Earth after the hammering session on Saturday (Sol 557, 150 hammer strokes), we had to conclude that having the Mole two to three centimetres deeper in and below the surface was not providing the necessary friction, even when helped with pushing on the regolith. The tether moved back and forth and then to the left, reversing much of its forward progress from Sol 550. In the middle of the movie, one can see that the dust particles resumed moving. Two particles seem to even be jumping up some centimetres. But on closer inspection, one can see them rather moving forward from the interior of the scoop in several slides. The moving dust particles imply that the Mole had backed up again and was tapping on the flat side of the scoop from below.
This result of the 'Free Mole Test' was, of course, not quite what we had hoped for, but we cannot say that it came as a complete surprise. After all, we are continuing to fight against the missing friction on the Mole hull. The test supports our earlier conclusion that the cohesive duricrust is unusually thick – at least based on what we previously knew about Mars – and that it must be quite rigid. From the Mole's first backing out (on Sol 322) and the observation that it stopped when it was 20 centimetres out of the ground, some of us (including myself) estimated that the duricrust was 20 centimetres thick (the Mole’s 40-centimetre length minus the 20 centimetres that it had backed out). The present observations at least don’t invalidate that conclusion.
What are our next plans?
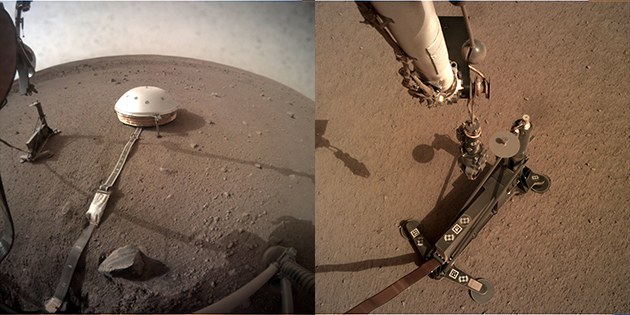
First of all, let me say that the team continues to be determined, although we appreciate that the task is not likely to become easier. We have, of course, made a plan for this outcome of the 'Free Mole Test'. The plan calls for retracting the arm and stereo imaging the pit with the Mole in its interior. We will be interested to see how deep in the Mole really is (it should be a centimetre or so below the surface), whether the morphology of the pit has changed and whether the sand that we had seen in the pit is still there or whether the pit has been drained by the hammering action.
Depending on what the imaging reveals, we plan to see whether or not we can move enough sand into the pit to provide the necessary friction, likely aided by pushing on the sand pile using the scoop to provide additional pressure (see the sketch below). This will be different from pushing on the duricrust surface because the sand has no rigidity and can transfer the force more readily. The scoop will, in addition, guard against the Mole backing out.
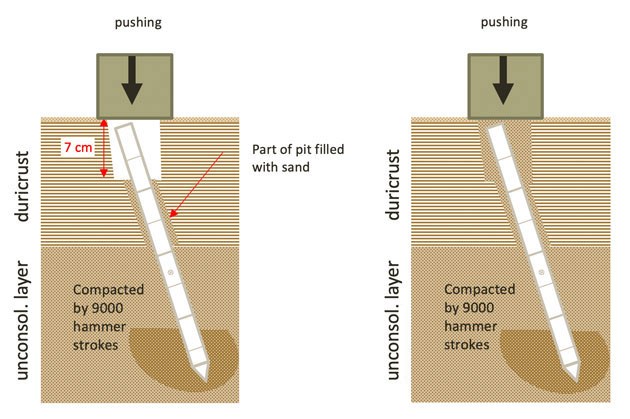
Filling the pit will not be an easy task and may take quite some time. (This is the reason for conducting the 'Free Mole Test' without prior filling of the pit.) A preliminary estimate before the recent pushing and hammering suggested a required volume of 300 cubic centimetres of sand, equivalent to a scrape (or a number of scrapes) with the seven-centimetre-wide scoop for the entire 40 centimetres, assuming that the sand layer is one centimetre thick, as suggested by the images.
The team will take a break now to discuss all the issues at hand and make the arm available for other scientific activities. If all goes well, we expect to be back in August.
Logbook entry 3 June 2020
More than three months have passed since my last blog post, when I had to report that the 'Mole' had unfortunately backed out again. Not as much as in October, but nevertheless, after going 1.5 centimetres into the surface, it reversed direction and backed out by 1.5 plus 3.5 centimetres, with the back cap ending a total of approximately five centimetres above the deepest position reached at the time and about seven centimetres above the surface. I described the situation in more detail in my previous post, in which I also detailed how the team attempted to explain the downward and then upward motion during one single hammering session (we had not seen this before).
As a consequence of the lack of success with the last attempt at pinning, the team decided to adopt an alternative strategy and try the 'back-cap push' technique instead. For this, the scoop is placed above the back cap and slowly lowered until it touches the cap. The arm is then further lowered and tensioned such that the scoop presses on the Mole with a force of about 50 newtons. When the Mole descends into the surface, the scoop follows its downward motion, but the load decreases as the Mole progresses. After approximately 1.5 centimetres, the pushing force reduces to zero and the push action has to be renewed.
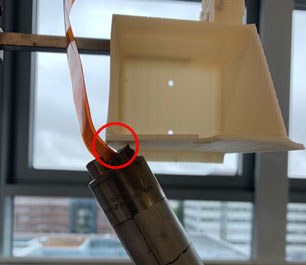
Because of the orientation of the Mole in the pit and the limited reach of the arm, the scoop touches the back cap close to its edge at more or less a single point. The image below shows the situation as simulated in a laboratory at DLR. This simulation was done to assess how critical the placement was for the tether. As can be seen, an error in placement of just a few millimetres could have either caused the scoop to slip off the back cap or to damage the tether. In addition, as the Mole moves down, the scoop moves to the left relative to the Mole and towards the tether.
Therefore, the team proceeded very carefully. After each placement, the situation was checked through imaging and recordings of arm motor current data before a number of hammer strokes were commanded. We started the procedure with only a few (25) hammer strokes. Only after the team had gained some confidence in its ability to carefully place the scoop and in the rate of progress of the Mole did we increase the number of hammer strokes per session to, in the end, 150 strokes per session.
As I had reported in an earlier post, the present mode of operation of the InSight mission allows only one cycle of operations per week. (Remember, we are in a phase of the mission when the instruments should be 'monitoring' rather than 'deploying'. In the deployment phase in early 2019, commanding was success oriented – that is, as needed. In the monitoring phase, we have far fewer team members; most have other project commitments.) Thus, placement of the scoop occurred only every other week (mostly on Saturdays), followed by what space engineers call a 'ground-in-the-loop', that is a checking of the placement of the scoop on Mondays to give the go-ahead for the next hammering, usually on the following Saturday.
We started about seven centimetres above the surface on Sol 458 (11 March) and we are now at the surface with the scoop on Sol 536 (30 May 30), after six cycles of hammering over 11 weeks. The movie below shows the entire history of penetration through back-cap pushing.

It is possible that the hammering stopped when the left edge of the scoop was still one millimetre or so above the surface. Also, the scoop is obviously at an angle with respect to the regolith surface, such that the right edge of the scoop may still be a centimetre or so above the surface. In addition, we know that the surface is covered with about one centimetre of relatively loose sand that the scoop may compress.
Therefore, the next step will be another hammering with the scoop pushing on the back-cap. During that hammering, we expect the scoop to be stopped by the regolith (if it has not been stopped already at the end of the Sol 536 hammering) and we can see whether the Mole is able to dig on its own. We call this the 'free-Mole' test.
Clearly, the Mole was not stopped by a stone as has been suggested
You may recall that our leading theory was that the Mole did not move into the subsurface because the regolith did not provide enough friction to balance the recoil force of the Mole. Although this force is much smaller than the force that drives the Mole forward (five to seven newtons as compared to 900 newtons) it still needs to be provided by the overburden pressure. Calculations that I had discussed earlier in this blog suggest that the friction force will suffice if the Mole is fully buried. Some additional friction can be provided if we use the arm to load the surface, which we will do.
Should the Mole move into the subsurface on its own (albeit being helped somewhat by the regolith push), friction will increase and improve the situation as the Mole moves deeper. When the Mole back cap is at a depth of approximately 20 centimetres, loading the surface will have become ineffective and the regolith push should no longer be necessary. We will then do what we planned to do more than a year ago – command the Mole to hammer to depth.
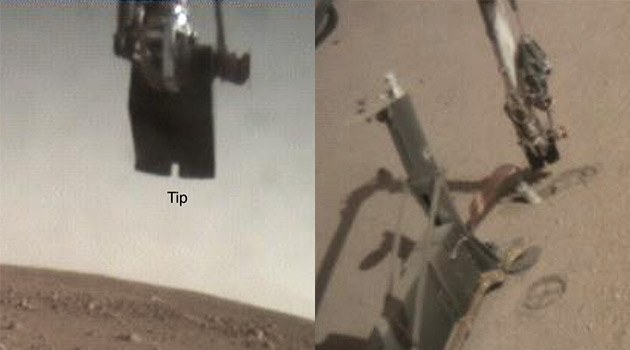
So, you see, the next step, the free Mole test, will be very exciting. But what if the Mole is just not deep enough in for sufficient friction? We then have two options, either fill the pit to provide more friction and push on the regolith, or use the scoop to push at the back-cap again, but this time with its tip rather than with its flat bottom surface. This would be a somewhat more difficult operation but doable, as the Instrument Deployment Arm (IDA) team thinks.
In addition, winter is approaching on Mars’ northern hemisphere and dust storm season will begin soon. The atmosphere is already getting dustier and the power generated by the solar panels is decreasing. This may affect our ability to performing energy consuming operations with the arm in the near future. Stay tuned and keep your fingers crossed.
And, is it not wonderful how people can work together from home across large distances on Earth and to Mars? Thank you very much team!
Logbook entry 21 February 2020

Dear friends of HP3 and the InSight mission,
Mars and the 'Mole' continue to make our lives … how should I say … interesting. You may recall that by Christmas, following the mishap of the Mole backing out in October, we were almost back in the Martian soil. There were a few (2-3) centimetres still to go before calling off 'pinning'. At that depth, with only a couple of centimetres of the Mole sticking out of the ground, there would not have been enough surface area for the scoop to safely press against its hull. To bring us to that point, we planned and commanded a final pinning and hammering for the first week of operations in 2020.
But upon seeing a decrease in the rate of downward motion before Christmas, we decided to readjust the pinning before starting the hammering. To save time, we decided to take a new and different approach to readjusting the pinning. Rather than completely separating the scoop from the Mole and then re-pinning, we loosened the push and then retightened it.
When we studied the images returned from Mars early in the morning of Sunday 12 January – the hammering had occurred the day before, on Saturday or Sol 407 on Mars – we were puzzled to see only one image. A hiccup somewhere had caused a delay in the data transmission. But that became unimportant when we saw the images late on Sunday evening – the Mole had backed out again! The detailed images (see the animation above) showed that it had moved further into the soil by about 1.5 centimetres during the first 20 strokes and then had – very unfortunately – reversed its motion and backed out by 3.5 centimetres during the remaining 110 strokes. Although this is only half of the distance that it backed out during Sol 325 in late October 2019, it was still unwelcome and puzzling.
We reached the conclusion that our retightening of the pinning had NOT been successful! But what made the Mole move forward before reversing its motion?

A possible explanation starts with the observation that the rebound force (the force that the pinning is supposed to balance) depends on the resistance of the soil that the Mole is moving through. The more resistant the soil, the greater the rebound force. Moreover, it was found that the Mole backed out this time at a depth that was within one error margin of the same depth at which it had started to back out in October. One possibility is that the pinning was marginally adequate for soil that the Mole had already moved through and was re-entering (loosened sand), but not adequate for 'fresh', undisturbed soil.
Furthermore, that soil may have been compressed and densified in front of the Mole tip by the previous hammering. The motion may thus have 'flipped' in direction from downward through loosened soil with sufficient friction from pinning to upward with less than sufficient friction after encountering hardened soil. In addition, the postulated increased rebound may have caused some loosening of the pinning.
After weighing all the options, we decided not to use the pinning technique again but rather press the scoop against the Mole's back cap. One argument for this decision was that we wanted to have the Mole below the surface anyway. However, that would not be feasible with the pinning technique and would require eventual back-cap pushing.
In addition, after the team's experience of operating the scoop, we all became more confident that the risk of accidental damage to the tether (with its power and data lines) was small enough to be worth taking.
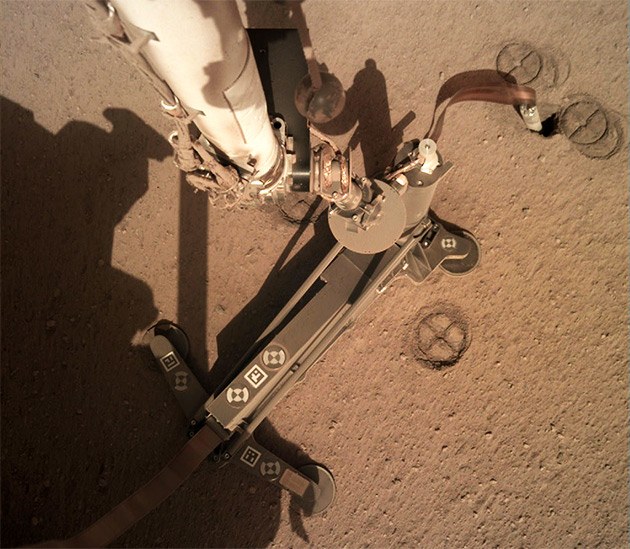
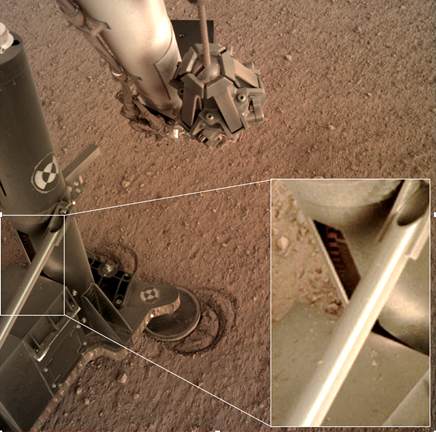
This week, the scoop was positioned above the back cap (see image) and pushing will start soon. However, this will only happen after carefully checking the placement of the scoop.
Before the positioning, the team used the scoop to conduct two experiments in preparation of a possible filling of the pit. First, it was successfully demonstrated that the wall of the pit could be collapsed by pressing against it with the tip of the scoop. The collapsed duricrust fell into the pit and partly filled it. Second, it was shown that the scoop could be used to scrape loose sand from the surface together and move it towards the pit. Both techniques may eventually be used to fill the pit and then allow pressing on the surface of the filled section to provide friction to the Mole below.
Logbook entry 23 December 2019
Merry Christmas and a happy New Year, first of all!

As you can see from the image from Martian sol 380 (counted since landing), we have brought the mole back in again, to almost where we have been end of October, Martian sol 322. The method we used to bring the mole back was pinning the mole with the scoop as we had done up to sol 318 when we switched from pinning to pressing on the surface. You may recall that pinning was abandoned when the mole was sticking out by about a centimeter only and pinning was no longer safe. We are now again close to a point where pinning is no longer safe. What causes risk is that the pinning scoop exerts some horizontal pressure on the mole. When the mole gets too deep, the scoop may swing above the mole along the backcap and may thereby damage the tether.
We came back down in a series of pinnings and hammerings on sols 346, 349, 366 (after the thanksgiving break), 373, and 380 choosing the number of hammer strokes to be performed carefully to conservatively. (You may notice that the time between the hammering sols has recently increased from 3 to 7 as the project had to move from tactical into monitoring operations.)
Over Christmas, HP3 has been programmed to do a number of operations aside from hammering. We will do three calibration measurements with the radiometer and a thermal conductivity measurement and a temperature using the thermal sensors on the mole. These will help to characterize the thermal properties of the regolith.
Although we have not been able to permit the planned heat flow measurement, the operations of the mole allow some conclusions on and models of the properties of the regolith and the duricrust. From the penetration rate, we have calculated a resistance to penetration by the duricrust of 300kPa which would be consistent with a porosity of >50% using dynamic cone penetration theory. This value is close to the strength of the duricrust estimated from our previous chopping on the surface. From the dimensions of the tip of the scoop and the force exerted by the scoop we estimated a strength of the duricrust of about 350kPa.
The most convincing (at least to me) explanation for the backing out of the mole assumes that the duricrust is underlain by cohesionless sand. Because the vertical load had relaxed between sols 322 and 325, the mole bounced when we hammered on sol 325 (for a lack of hull friction). During the upward motion of a bounce, sand flowed in and partly filled the borehole. This was repeated during the next bounce and so on and so the mole moved slowly up. The motion stopped when the tip was no longer in the sand but rather had entered the duricrust from below. If this view is correct, the total upward motion of the mole provides an estimate for the thickness of the duricrust of about 20cm.
After Christmas we will resume our operations to bring the mole further down. We will finally decide in the week of Jan 6th, but plans include pushing on the backcap to bring it down a few more centimeters, pushing on the regolith and hammer to see whether the mole is deep enough in to proceed on its own and/or filling the pit. All these options are on the table but we may not need or do all of them
Seasons Greetings
Logbook entry 28 October 2019
More surprises on Mars! Unfortunately, we saw that the Mole had backed-out of the Martian soil instead of going deeper as we had expected. How could that happen? After all, this Mole does not have a reverse gear as the Mole that DLR built for the ill-fated European Beagle II lander had. (That probe was designed as a sampling device that would go down and then come up again with a sample.)
But we have seen the phenomenon of backing-up before: in the lab at small atmospheric pressure such as on Mars. Remember, the Martian atmospheric pressure is only 0.6 percent of the Earth’s! At Earth’s atmospheric pressure, if the Mole starts to rebound and if the rebound is not compensated by friction on the wall, the Mole rapidly opens a cavity below the tip of the Mole. The difference in pressure in the expanding cavity and in the atmosphere creates a suction effect that helps damping the rebound. The atmospheric pressure on Mars, however, is so small that the suction effect does not play a role and cannot really help the Mole. This is another reason why the friction on the Mole hull is so important! It is the major force to balance the recoil! In addition to the recoil you need some collapsing of the borehole at the tip in order to let the Mole move up.
When we analyzed the images from the previous hammering, we had an indication that the Mole´s forward motion had slowed down towards the end of that session. Therefore, we played it safe by commanding a smaller than originally planned number of hammer strokes and then a readjust of the pushing of the arm and scoop on the soil.
I, for one, would have never thought that the Mole could back out as much during a few tens of hammer strokes. Maybe, if we were out of luck, it would not penetrate or possibly come up a bit. Well, operating on Mars is not only time consuming. It is full of surprises! The interactions of low atmospheric pressure, low gravity, unknown regolith mechanical properties and Mole dynamics are a challenge.
What to do next? First, we want to be sure that the Mole will not tip over. Then, we want to inspect the hole it is sitting in, the view of which is blocked by the scoop. We may then do another pinning trying to bring the Mole back to where it was before the recent hammering. And start again to get it to dig below the surface. But give us some time to think!
Stay tuned, it is not at all over, but the Mole is not making our lives easier these days! It is good that we have such a great team from JPL and DLR working on the problem. And it is great that NASA and DLR continue to support us. After all, our goal is to eventually go much deeper!
Logbook entry 25 October 2019
More good news from Mars: The Mole has digged further even after releasing the pinning!
On sol 318 we had the Mole execute 150 more strokes that brought the back-cap of the Mole so close to the scoop that continuing with pinning was no longer considered safe. By that time, the Mole had digged a total of 4-5 centimeters under pinning. If we had the Mole dig further with the scoop pinning, it could have moved underneath the scoop at which point the arm would have made an uncontrolled sideways swing releasing the tension. That way the scoop could have hit and damaged the tether. Therefore, on sol 319, the tension was released by moving the scoop slightly away from the Mole.

On sol 322, the scoop was moved an additional centimeter sideways and downward by up to 4 centimeters so that it would press hard on the soil. Thus, we increased the vertical load on the Mole by roughly twice the load from the overburden. This is considered not as effective as the pinning but should help the Mole regardless. We only commanded 50 hammer strokes to be executed as we could not get prior confirmation that the scoop had indeed moved down. The images that we got down on 23 and 24 October clearly show that the Mole had digged further! Possibly a little faster than during the pinning, my "eyeball" observation that needs to be confirmed.
Note that the Mole moves at a comparatively small rate of only about 0.1 millimeters per stroke. This is an order of magnitude less than during its initial penetration as far as we can tell from the available data and much less than at shallow depth in the silo in the laboratory under Earth gravity. One explanation is that the Mole has compacted the sand underneath during the roughly 8000 strokes it hammered on the spot in March. It is also possible that the Mole is working its way through some gravel or – less likely – around a stone. In any case, the rate of progress generally decreases with depth but here it could also increase for some of the next hammering sessions.
We have commanded the Mole to perform 2 times 150 strokes on sol 325 – intermitted by a readjust of the vertical push to compensate for possible regolith relaxation – and hope to see the Mole dig further. We will then increase the number of strokes per sol and hope to see it disappear from our view into the Martian regolith soon. That would be the point at which we would make plans to release the scoop and use the arm to replace the support structure.
Logbook entry 18 October 2019
Good news from Mars, DLR´s 'Mole' has moved forward! The HP3 heat flow probe has moved a total of two centimeters (calculated from the image data by Troy Hudson and Bob Deen, JPL/Caltech) downward in three hammering sessions with carefully chosen 20 and then two times 100 strokes. It is difficult to accurately estimate progress without stereo images. The animation shows the combined movement stitched together from images of the instrument deployment camera IDC on the InSight lander.
The clearly visible movement is very good news and confirms our leading theory that the mole failed to move forward because it was lacking friction from the Martian sand. In (some) analogy to your car you could say it was lacking 'grip'. The plan will be continuing to use the scoop to provide 'grip' as long as the mole is sticking out.

Eventually, the Mole must work on its own but we will support it at shallow depths by loading the ground by pushing hard on the surface with the scoop.
There has been rotation of the Mole around its axis, more so in the first two hammering sessions. We are carefully watching the rotation. From testing in the testbed on Earth we know that the probe tends to rotate as it penetrates. Once the tether is in the ground we expect it to act as a fin that will reduce the rotation as it did in the testbed.
Logbook entry 7 October 2019
Welcome back from the conjunction! In August, I reported that the mission was entering a Solar Conjunction Break until 10 September, and that we would take up the work of getting the Mole moving again afterwards. I also reported that the team was considering pinning the Mole with the scoop rather than spending more time trying to collapse the pit. At least that was my proposal at the time, and indeed the project decided to go that way. But while we were working on implementing the ‘pinning’, as it is now called, HP3 had to solve an issue that had occurred in our electronics box (the BEE) and that had motivated the team to switch the experiment off for safety reasons until recently. The problem was that we had some strange readings in the downlinked data already before conjunction that suggested that some of the data stored in the mass memory of the BEE had been overwritten. It was soon recognised that the most likely cause was what experts call a ‘bit-flip’. This flipping can occur when cosmic ray particles hit the mass memory. This is not unusual on Mars, where cosmic particles get through the thin atmosphere better than we are used to on Earth.

To avoid this, electronics box designers usually run critical systems three times in parallel, so that if one is affected by a bit-flip, the computer can use the result of the two unaffected systems. Thus, most bit-flip problems can be avoided. Unfortunately, that protection mechanism is not fully implemented on our BEE, as we were short on mass memory. The anomaly was resolved by rebooting the BEE. But to be on the very safe side, the design and the program code were reviewed with scrutiny to be extra sure that a bit flip could not cause any harm, for instance, by causing erroneous commands.
The exercise did not cause much delay for the Mole because the Instrument Deployment Arm (IDA) team needed to carefully practice the complex operation of pinning anyway. Everything seems to be ready now for pinning and hammering on Martian Sol 308, which will be Tuesday 8 Oct, with data coming down Wednesday afternoon (CET).
The image shows the scoop having already touched the Mole, which is confirmed by a slight increase in mole tilt recorded by the mole tiltmeter, STATIL. The fact that this value is small suggests that the Mole is sitting solidly in the ground. This is considered good news because it suggests that part of the Mole is in good contact with the soil and experiencing friction. Further fine positioning in the vertical direction was commanded last Thursday with the scoop sliding down the Mole by about two centimetres. If everything goes well, and after another GO/NoGO decision point, we will do the next hammering – the first one since the diagnostic hammering on 26 March 26. And this time, it will not be just for diagnostics!
The number of commanded hammer strokes has been limited to 20. The concern is that the pinned Mole could proceed quite rapidly and make the five centimetres it is sticking out of the ground in only a few hammer strokes. That might cause the scoop to hit and damage the measuring tether coming out of the top of the Mole. We here at DLR have used performance data for the Mole from laboratory measurements to determine that, in the best (or worst) case, it would take the Mole eight strokes to make four centimetres. As this was thought to be overly conservative, and it was feared that the Mole might not make any noticeable progress, the team settled on 20 strokes.
That’s it for now. Stay tuned and help us by keeping your fingers crossed!
Logbook entry 27 August 2019
I hope you had - or are still having - a good summer!
Back in early July, I reported that we had safely removed the Support Structure Assembly (the SSA) to expose the mole. You may recall that the SSA’s function is to house the mole and the tethers before deployment and that it was sitting above the mole when the latter penetrated into the surface. The SSA was thus blocking the view of the mole. By removing it, we enabled us to view the mole up close, to eventually interact with it, and to work its immediate surroundings with the robotic arm. What we saw first showed us that our estimate of the length of the mole in the sand of 30-35 cm was pretty good (Figure 1).
We see now that about 5 cm are sticking out of the ground. This also confirmed our suspicion that the mole had stopped penetrating as it left the guiding springs in the SSA that had provided the necessary friction. It would have been extremely bad luck if a sufficiently large stone would be found just at that depth of 35 cm. What further confirmed the theory of lacking friction from the Martian sand was the size of the pit that the mole had cut out. We had indications before that the mole might have dug a hole or a pit but we had not expected it to be that large. As you can see from Figure 1, the diameter of the "mole hole" (you may recall that we had nick-named our commanding office at JPL the "mole hole in December) is almost twice the mole diameter or about 6 cm. Thus, the mole must have precessed (like a spinning top) while it was digging. Moreover, the twist in the tether shows that the mole must have rotated clockwise about its long axis by about 135°. The image also showed that the feet of the SSA had left clear footmarks that had remained stable, indicative of at least some regolith cohesion as is the pit itself. The multiple footmarks are proof of the SSA having been lifted and bouncing with the mole during hammering.
Another image taken later under better lighting conditions (Figure 2) revealed the bottom of the pit being about 2.5-3 mole diameters or 7-8 cm deep. That image also suggested that there was a layer of quite some cohesion with clumps and concretions and maybe caverns, possibly overlying cohesionless sand. The interpretation is that we exposed a layer of duricrust about 5-10 cm thick (on Mars, the term duricrust is used to indicate a mechanically strong layer of regolith, somewhat different than in terrestrial geology). It is thought by geologists to consist of cemented sand.

In July one believed that the duricrust around the pit might be easily crushable. Thus, it was decided to go ahead with the plan of loading the surface with the scoop to increase pressure and thus friction on the mole hull, but, the pit would have to be collapsed first. Three rounds of pushing on the surface with the scoop followed until mid of August of two pushes each. The first push was done with the flat blade (65 sqcm), just as shown in Figure 3.
Then 4 pushes with the sharp tip (Figure 4a left,and 4b, right) and a final one again with the blade. The pushes had a force of about 50 N, equivalent to about 10 kPa of vertical stress with the blade and 300 kPa with the tip.
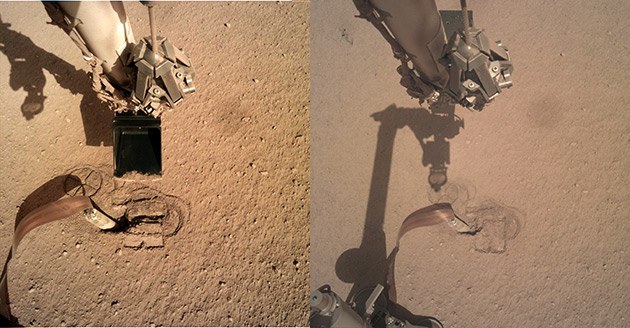
Figure 5 shows the result of gardening with the tip (mid of August 2019), and Figure 6 the result of the final push with the flat blade. As Figure 6 shows, none of these could fully collapse the pit, although a partial collapse can be seen on the right-hand side of the pit. This probably indicates some inhomogeneity in the duricrust rheological properties. Moreover, it is seen that the pit got partially filled to about half of the initial depth. I conclude that the duricrust has a compressive strength of at least a few 100 kPa and is overlain by an about 1 cm thick layer of loose dust (which is the material that got mostly moved and compressed by the pushes). It is interesting to note that an independent estimate that I made on the basis of our tiltmeter recordings of the initial penetration of the mole resulted in a similar order of magnitude resistance (300 kPa) of the top layer to penetration. These recordings had suggested that the mole first lifted the SSA while at the same time penetrating slowly about 7 cm until it had hammered through the duricrust and the SSA resettled on the ground.
The mission is pausing now until 10. September because Mars is entering what is known as solar conjunction. This means that Mars is becoming invisible from the Earth because it is moving behind the sun (as seen from Earth) and communication with a spacecraft on Mars becomes impossible.
The project has prepared the lander for this hiatus and some in the team use the time for some well deserved vacation. For others, this is a break that will allow some thinking ahead of what to do next. I am leaning towards moving away from further trying to collapse the pit as it proved to be very time consuming. Rather, I am thinking towards pinning the mole with the scoop such that the pinning and the pressing of the mole against the wall of the pit would increase friction. This will be more risky than the previous strategy, but with the unexpectedly stiff duricrust, it may be worth a try.
That's it for now. Stay tuned until we come back from conjunction with a report on what the project finally decided to do.
Logbook entry 1 July 2019
Good News! The SSA is safely on the ground (see GIF)! The day before Yesterday/Yestersol the third step of the SSA lifting operation was safely executed on Mars. The SSA was lifted up to 52 cm above the ground and then placed about 20cm back towards the lander from the mole. As far as the data tell us now, everything was done as planned and the hardware is safe. There was concern that may be some HP3 hardware could be damaged but everything looks good. Thank you guys at JPL and HP3 engineering and operation teams! Great Job!

The IDA (instrument deployment arm) team will now proceed to release the grapple and stow it within the next few days. HP3 will be able to inspect the mole and the pit more closely and see whether there is reason to modify our plan which calls for collapsing the pit, pushing on the ground with the arm’s scoop and hammer as described previously. Given the upcoming 4th of July weekend and the stowage operations count on at least a week’s time before we have more news.

Logbook entry 28 June 2019
Two of three steps to lift and move the HP3 Support Structure have been successfully completed by yesterday and we expect the final lift and move to occur on Saturday. Great work by the team! The two steps so far included an initial lift by 12 cm and a second by 13 cm more. A major reason for doing the lift in relatively small steps was that we wanted to make sure that the mole or the tether were not somehow snagged in the support structure and the mole would not be drawn out of the ground during the lift.
During the first step, the tether that was pulled out came from the amount of tether in the chimney in which the mole was sitting before hammering started. During the second lift, tether was pulled from the tether box and the amount was recorded with our tether length measurement device mounted close to the chimney.
That device worked just as expected. The tether is now a bit taut but that is fine and the go was given last night for the third and final step. Raw images from the ICC (instrument context camera) and the IDC can be found at the InSight project site.
The first lift already revealed the pit that surrounds the mole. I along with others from the team were a bit shocked when we saw how large the pit actually is. Its diameter is about two times the diameter of the mole. The bottom of the pit is difficult to see (we expect better images once the lift is complete) but it seems that it is about 2-2.5 mole diameters deep. A mole diameter is 27mm. So the mole must have compacted the regolith quite a bit. In addition to its own volume it must have displaced about half of its buried volume.

There seems to be a little rim surrounding the pit but most of the displacement likely was compaction. We cannot see the inclination of the wall very well but it at least seems to me that the mole was "precessing" (like a spinning top) and carved a conical hole. This is consistent with the recordings of our tiltmeter STATIL during the hammering in March. We will have to wait for better images to confirm or disprove that. In any case, the apparent compaction seems to be compatible with a large porosity, relatively low density, and with the low seismic velocity of 120 m/s reported by the SEIS team, and the low thermal inertia (200 TIU) reported by HP3. There have been suggestions that maybe there is a stone or stones at depth that the mole may have displaced and that the pit is indicating the displacement of that stone. We will have to see.
It is a bit premature to firmly talk about the next steps after part three, grapple release and its stowing. But the discussion so far centers around filling the pit and then proceeding with the pushes on the regolith that I have described in my previous post.
Logbook entry 14 June 2019
The support structure lifting operation has begun! The GIF below shows how the grapple of the arm grabs the hook at the top of the SSA. The lifting is foreseen to start on 22 June - first at 12 centimeres, then at 25 centimetres on 25 June and, finally, on 28 June the structure should be completely lifted and moved about 10 centimetres towards the lander.
Logbook entry: 6 June 2019
NASA and DLR have just issued a press release about our next activity regarding HP3 on Mars. We have been asked to remain silent until the release is out and this is why the update of the Blog has been held off for a couple of weeks.
In my previous blog, I announced a second diagnostic hammering that we – after some delays caused by issues with fault protection - executed a few days later. But the results were inconclusive, unfortunately. There was movement of the SSA so as if the Mole was still hitting the support structure. The tether in the window – you may recall that this was our major focus of interest at the time (see previous logbook entry) - moved up and down a bit, but no clear forward movement was visible. It was worth a try although one might argue that – since nothing substantial had changed – the results were not unexpected.
It was clear then that we needed a change in strategy. A review showed that we were still left with the three potential causes for the problem I have been writing about in previous releases: 1) snagging of the Mole or the tether in the support structure, 2) a large enough stone/rock at about 30cm blocking its way and 3) insufficient friction on the Mole hull. And we were still left with the observation that we cannot rule out numbers 1 and 2 but that we consider them rather unlikely. Snagging requires some specific movements of the Mole that it may have performed but not likely so. Judging from the distribution of rocks on the surface, the likelihood of encountering a rock at the right depth was concluded to be only a few percent. So we are left with the friction hypotheses being the most likely hypothesis and – importantly – the one that we can do something about to help the Mole along. We had already for quite a while considered that pressing on the surface could help increase the friction. The strategy may become clear by considering the illustrations below.
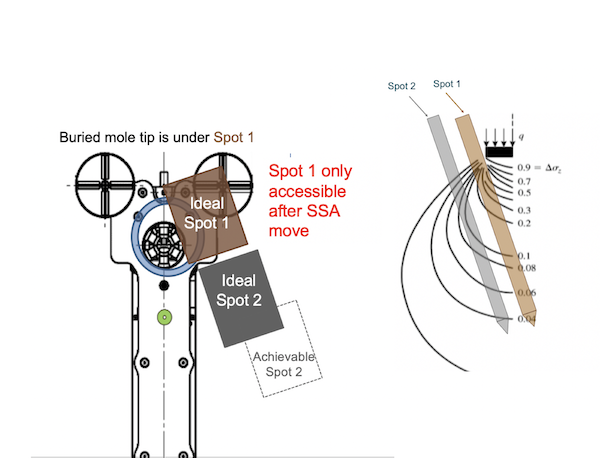
The left hand illustration shows the support structure (SSA) with its two fore-feet (up north) and the Mole (of about the same size) in the middle below. Also shown are two spots (spot 1 and spot 2) on which we did consider pressing with a scoop at the arm of the lander. The rectangles are approximately the size of the scoop. The right hand illustration shows the “stress bubble” underneath a load on the surface together with the Mole if the load would be applied at spot 1 or 2. It is clear from this illustration and well known in foundation engineering that the pressure in the soil is largest immediately underneath the load.
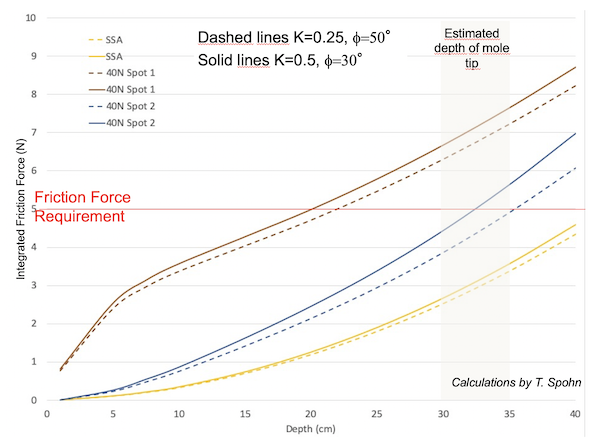
Therefore, spot 1 is much better than spot2 (which cannot even be reached with the arm, but only the indicated achievable spot 2)). The logical consequence is that we decided that the SSA should be removed! The chart below shows the results of some calculations of the friction force on the Mole hull as a function of depth of burial assuming a range of Martian regolith properties for spots 1 and 2 and for a reference case with only the load of the SSA acting. The plot also shows the estimated depth of the Mole tip and a conservative friction force requirement. It can be seen that we can meet the requirement by pressing with a force of 40N on spot 1, but that pressing on spot 2 would be marginal.
Of course, lifting the SSA will provide us a chance to take a close look at the Mole that was hidden underneath the SSA before. Engineers at JPL have been practicing the lift for a while now. A movie showing the lift and Troy Hudson (JPL scientist and engineer) explaining the rationale can be found on YouTube. An image of the scoop pressing on the surface in the lab is here.

The lifting will not be without risk, though! If the Mole or the tether are indeed snagged in the SSA, then we may actually pull the mole out. Therefore, a operations scheme has been designed where the lifting occurs in several steps with careful examinations on the way. This is then the major reason why the operation will take a while, until mid next month or possibly even later.
Stay tuned.
Logbook entry: 6 May 2019
It has been about a month since my last newsletter and it is about time to report on how things have evolved. The interpretation of the seismic data have settled to a value of 70-80 msec as already reported for the time interval between the first hammer stroke and the first substroke. This value is inbetween the extremes for a freely bouncing mole (50msec) and a mole progressing normally (100msec). The interpretation is that the mole has some hull friction but not enough to make substantial progress. Temperature measurements using the TEM-A sensor package on the mole indicate that the thermal resistance has decreased suggesting improved contact between the mole and the regolith. How that could have happened is not entirely clear but it could be that the regolith has relaxed to some extent improving thermal contact and friction.
Our camera expert have been able to devise a pose of the arm and the camera and suitable lighting conditions to clearly image the tether through a window in the “chimney” of the support structure (see below). The "chimney" is where the mole was housed before it started penetrating; the tether pulled by the mole is running through that chimney.
It is interesting to see that the tether bends over at the top. This observation has been used to confirm the mole length in the ground of 30cm by comparing the image with emulations with the flight spare model in the labortory. Comparison with earlier but less well lighted images even suggest that the mole has moved slightly during the diagnostic hammering! Thus, it is suggested that observing the tether through the window is likely the most direct observation of any mole downward movement. The team has thus decided to do another two rounds of diagnostic hammering in the late afternoon when the lighting conditions are most favorable and take a movie of the support structure and the window. Two rounds for safety reasons instead of one longer hammering round. Dividing the hammering that way allows a check during what space engineers call a “ground-in-the-loop” to see that nothing unexpected has happened. Unfortunately, there have been delays, first because of a temperature issue and an second an issue with the arm, both related to cautious safety regulations. But we should be able to do the first round of what we call diagnostic hammering #3 (#2 was commanded but not executed because of the issues) tomorrow. It will be interesting to see whether we see movements of the tether.
In parallel with the preparations for diagnostic hammering we are doing testing in the lab (where the Mole proves to be robustly able to penetrate nicely through various sands and gravel push aside stones etc at least under Earth gravity) and tests at JPL and model calculations at DLR emulating possible operations with the arm and the support structure on Mars to either collapse the duricrust or increase the vertical stress and friction on the mole hull. Depending on the outcome of the diagnostic hammering, our next operation could be using the arm to load the support structure close to the fore-right-foot (the one you see in the image above) or the ground right next to the support structure near the tether box. These are spots believed to be close to the mole.
Otherwise, HP3 is entirely healthy
Stay tuned.
Logbook entry: 11 April 2019
It is about time to report on the progress that has been made since the last entry on March 22. After the diagnostic hammering was approved, it was actually commanded on the 25th, executed on Mars on the 26th and the first results were down on the 27th of March. However, the seismic data came only down by the end of that week and we had the first meeting to learn about the results on April 1st. Operations in Space take their time! As I have already described in earlier mails, the progress depends on commanding opportunities on Earth (3 per week), flybys of communication orbiters on Mars, and data downlink pipelines. Our discussions – now that the European teams are all back in home - use web communication interfaces and occur several times per week - early in the day in California, late in the afternoon in central Europe.

The diagnostic hammering was successful. The movie showed the Support Structure pitching forward as the mole hammered. The forward pitching could have been the result of the mole somehow pulling at the support structure or the shaking of the latter by the mole allowed it to "fall down" by about half or so of a centimeter. The seismic data are still under evaluation but if you recall that we were wondering whether the time difference between the two major hammer strokes was 50 or 100 msec, the results indicate that the measured value is somewhere in-between the two. No final value yet, but we may end up somewhere around 70-80 msec. What that means in terms of the mole movement must be assessed by the mole engineers!
The discussion about the reasons of the mole not penetrating further have settled to three hypotheses of similar credibility but differing likelihood of occurring:
1. The mole or the tether that it is trailing behind may be snagged in the Support Structure. While this hypothesis is credible it so far lacks a clear mechanism of how this may have happened. Tests at the DLR Institute of Space Systems have shown, that the tether may get snagged but only in very special circumstances. Still, a functioning model of the hardware has been shipped to JPL this weekend for engineers there to also check this possibility (BTW: It takes 2 entire weeks to clear customs over here for such a shipment. Add to that some time for customs clearing in the US)
2. The mole may have encountered a sufficiently large rock or stone at 30cm depth. The size of the rock would have to be 10cm or larger for the mole not being likely to push it aside or to go around it. This explanation is so simple that everybody would be ready to believe it. But, the likelihood of such a stone blocking the moles’ way is only a few percent judging from the well-established (surface) rock-size-frequency distribution for the landing site.
3. The mole may not have enough friction on the hull to balance the recoil (as explained in part in my earlier posts (e.g., the one of March 21st)). Consider hammering a nail into a wall. You need the wall to provide enough friction to the nail so that it will move forward and not simply rebound as you hit it with the hammer. In a similar way this is true for the mole. Although its internal masses and springs are dimensioned such that most of the energy is directed forward, there is a resulting force of about 7N that still needs to be balanced by hull friction from the sand around it. This would not be a severe problem if the sand were like quartz sand, for example, having no or little cohesion. What is a daily life analog? Well, consider sugar vs. flour. If you stick a finger in sugar and pull it back, the hole will disappear as the sugar will flow back into the hole you made. Try the same with flour! In this case, the hole will stay open. Sugar is cohesionless, while flour has cohesion. Geologists have seen in other missions on Mars that the Mars sand is cohesionless and therefore a borehole should collapse and provide pressure and friction to the mole hull. But geologists have also seen that the topmost centimeters on Mars is formed by what is called a "duricrust". Here, chemical reactions between grains of sand have made them stick together, providing cohesion in that layer. The duricrust is usually thin and not a problem. But at the InSight landing site, it seems to be 20 or so centimeters thick! If the mole is sitting in the duricrust, its hull may very well have lost friction and upon time, the mole may have widened the hole in the duricust as is suggested by the data from our accelerometer and by our thermal data. One may argue that the duricrust would likely collapse as the mole hammers through. Yes, but a hole a few times the moles diameter filled with collapsed duricrust is still likely to not provide enough pressure and thus friction to the hull. It should be said here that the Martian environment adds to the problem. Because the gravity is only about a third of the Earth’s the moles weight is of less help then it is on Earth. And the low atmosphere pressure of only 0.6% of the Earth’s amplifies the problem.
At the moment it seems that the discussion is leaning towards hypothesis #3, not the least as we have seen such a behavior in tests on Earth in cohesive sand and low atmosphere pressure. But we have not settled yet on this explanation. In any case, if hypothesis #3 were found to be the best explanation, it may also offer the simplest remedy. All we would need to do is help the mole to balance the recoil. The arm may be of help here but that needs to be assessed further by our engineers.
Otherwise, the mole is entirely healthy
Stay tuned.
Logbook entry: 22 March 2019
The Anomaly Response Team today has approved of our way forward. Accordingly, the next steps for HP3 will be:
Command a TEM-A thermal conductivity measurement today to be executed over the weekend. The measurement takes 24 hours. On Monday, command the diagnostic hammering and image taking I was describing in my previous post to be executed in the afternoon of the next sol on Mars with data being downlinked coming Wednesday. We may then have to take some time to evaluate the data.
Stay tuned and keep your fingers crossed!
Logbook entry: 21 March 2019
The InSight team is attending the Lunar and Planetary Science Conference in Houston, Texas, this week and at the time of this writing is presenting the first results of the mission to the interested scientific community. Bruce Banerdt, the mission PI, argued that the pace of this mission is slow because we are relying on stochastic processes and their results. While the lack of observation hitherto of a Mars-quake was still consistent with estimates of the Martian seismic activity, it was already clear that Mars cannot be as active as the Earth, which was, however, expected.
The stochastic results (the distribution of rock in the regolith) of a stochastic process (impacts) is still puzzling those who worry about the mole. This week we will have our third Anomaly Review Team meeting and we are seeking approval for a short diagnostic hammering cycle of 10-15 minutes length. Remember, the total numbers of strokes is a consumable (although we do not know for sure how many in total we will have, not until we have spent them all!). We want to use a particular filter on the short-period seismometer that will allow us a much better determination of the arrival times of the signals generated by the major hammer stroke and its strongest substroke. To understand that, we will have to dig a bit into the workings of the mole. Consider the image of the interior of the mole:
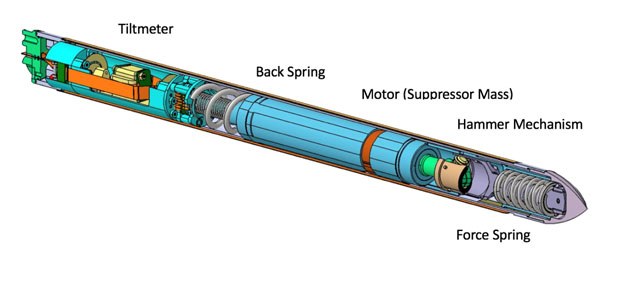
The motor (blue) pulls the hammer back (purple) and compresses the force spring until a mechanism releases the hammer which is then accelerated by the relaxing spring towards the inside of the tip. This provides the first and major hammer stroke. As a reaction of the hammer moving forward, the motor is moving backward and is compressing the back spring. When the back spring relaxes after being compressed to the maximum, it will accelerate the motor forward which eventually hits a latch in the casing and provides a second, smaller stroke, the first sub-stroke. Meanwhile, the hammer being repelled from the tip compresses the force spring again which on relaxing causes a third even smaller stroke.
We have shown that the short period seismometer can record at least the first sub-stroke in addition to the major stroke. We have further shown that the time between the sub-strokes is indicative of the motion of the mole. For example, if it is slowly moving forward, then the time difference will be about 100 milli-seconds. If it is rebounding while hammering against an obstacle, that difference will only be 50 milli-seconds. With a special filter applied to the short period data directly onboard the SEIS instrument, we will get a much better time resolution of the signals and should be able to diagnose whether or not the mole is stuck or even slowly moving forward or is rebounding. Knowing this will help us greatly in designing our strategy.
In addition, to the short period seismometer, the broad-band seismometer will be listening in, but with a filter specifically designed to prevent its ultrasensitive sensors from saturation. It is hoped that we will be able to derive a seismic velocity layering of the underground and see whether there is indication of a mechanically hard layer around 30 cm depth.
As a third diagnostic tool we will be using the IDC camera on the arm to take a movie of the support structure while the mole is hammering. Because the camera can only image about every fourth stroke, this is a bit experimental but the hope is that we can see the support structure either moving or not at all. An alternative considered to taking a movie would be to take a long-exposure image of the support structure while hammering.
If the project approves of the plan after a careful review, we should be able to command the experiment next week. However, it will take a while until the seismic data is fully downloaded and can be interpreted.
In the meantime laboratory and test bed experiments have started at DLR in Bremen and Berlin and at JPL in Pasadena. These aim at understanding the situation and how the mole got into it and how we may solve the problem. JPL has a functional model of the robotic arm that can be used and DLR will ship one of its fully functional hardware models to JPL.
Logbook entry: 12 March 2019
This week the radiometer has observed three passes of Phobos in front of the Sun: Phobos eclipses. The eclipses were pronounced in the radiometer data showing an approximately 1°C dip in temperature through the roughly 30 seconds of duration of the eclipse. The cameras on InSight have also observed the small and brief dip in daylight as can be seen in the animated gif below. The radiometer data will be interpreted in terms of the thermo-physical properties of the top-most layers of the Martian soil. Interpretations of the results are expected by the time of the Lunar and Planetary Science Conference earliest, which is from 18 to 22 of March.
Maybe you followed the Mars weather service at https://mars.nasa.gov/insight/weather/ as well as the virtual control room at https://www.musc.dlr.de/hp3/ and maybe you were wondering why the reported day-time temperatures are significantly different. While the weather service has a day-time maximum temperature of -13 to -15°C, on the MUSC server day-time temperatures go up to +15°C. The reason is that, while the weather service shows the air temperature, the MUSC server shows the so-called brightness temperature of the surface recorded as measured by the HP3 radiometer. The latter temperature is the temperature at which the Martian surface radiates heat while the air temperature is measured on a mast on the lander, a good metre above the surface. In more practical terms, the surface gets typically a good 20 to 30° degrees warmer than the air above the surface.
As for the Mole, it’s been a busy week with meetings and lots of brainstorming. The seismometer has recorded the hammering strokes which should be a useful tool for diagnosis (In addition, the data are of great scientific interest to the seismologists - and eventually geologists). For instance, a hammering stroke is actually two strokes (a major and a minor sub-stroke) that are about 1/10 of a second apart. The time difference between these strokes depends on the rate at which the Mole penetrates to depth. It is -in principle- the shorter, the faster the Mole moves forward. But if the Mole is not penetrating, but rather bouncing on the spot, the difference can be reduced from the value for normal slow penetration, too. Indications are that the two sub-strokes have been recorded by the short-period seismometer and are investigated. A thermal conductivity measurement has also been made and the data are awaiting downloading and interpretation.
This week, we will have a meeting of a larger team at JPL here to see where we are headed based on the evidence collected so far. The two most prominent hypotheses are 1) the Mole has encountered an obstacle (rock) and is hammering on the spot. In that case, it would be likely that it has widened the borehole it had been digging. An alternative is that 2) the Mole hardware got somehow snagged in the support structure because the Mole has been forced to egress at an angle of about 15°, most likely due to a shallow stone which it could, however, pass. As we have indirect evidence (that has been consolidating) that the mole is about ¾ of its length out and in the ground, it may be that it’s back part got snagged in the housing.
Stay tuned
Logbook entry: 6 March 2019
Excellent news! We just got the data from the first Phobos eclipse observation and the cooling by the shadow passing through the fields of view of the radiometer in about 30 seconds is clearly visible. The cooling is by about 1°C and is thus somewhat larger than expected and certainly better than with the most pessimistic estimates (that would have said, we will not be able to see it at all)! So the team is happy and is rejoicing about the first eclipse on Mars ever observed with a radiometer.
What is the significance of the observation? There is a quantity that scientists call the thermal inertia. This quantity depends on the thermal conductivity of the near surface material, its density and its heat capacity. A small value indicates low thermal conductivity, for instance, or a large porosity (meaning low density) etc. The larger the thermal inertia, the smaller the effect. In particular, if the shadow moves through rapidly and the inertia is large, little effect will be measured. The measurable effect is the more pronounced the smaller the inertia. The team will now have to analyze the data and come up with a model of the uppermost millimeters or so of the surface material. So, it is part of our efforts to measure the geophysical paramters of Mars.

As for the mole, the team has commanded a large number of images to be taken by the cameras on the lander and the arm. Some of the images we already have, indicate that part of the mole is actually visible. The consensus is that the mole is about 30 cm in the regolith and probably still 7cm in the tube of the support structure. It is approximately pointing 15° away from the vertical and has undergone either some rotation or precession of its rotation axis.
It is still healthy but, of course, Its life time is limited - in terms of hammering strokes it can make before it is worn down - although we are not concerned that it would breake soon. Still, the team wants to play it safe and get all the evidence that could become available including seismic data together to see how we can help the mole to overcome the obstacle (or to get through a possible layer of gravel). Once we have all the data, we will decide on how to proceed best.
Stay tuned
Logbook entry: 5 March 2019
The mole is healthy and performed a round of hammering on the weekend. It has, thus far, continued to work against some resistance without clear evidence for progress. The team has therefore decided to pause the hammering for about two weeks to allow the situation to be analyzed more closely and jointly come up with strategies for overcoming the obstacle.
In the meantime, we are planning on carrying out thermal conductivity measurements for the first time on Mars and start to conduct observations of the shadow of Phobos, which will be travelling through the radiometer’s field of view on 5, 6 and 8 March 2019. A lot to do and still a lot of excellent science to be expected from HP3 and from InSight! Planetary exploration is not as easy as pie!
Logbook entry: 3 March 2019
Kölle Alaaf (or Düsseldorf Helau and Meenz Helau)! Some of us on the team coming from the Rhineland centers of Carnival would now be busy partying. But commanding an instrument on Mars is even more exciting! The data that we've analyzed tell the following story about the first hammering day: It is fact that the mole is at least 18 cm out of its guiding tube and has not digged deeper than 50 cm (which would be the depth where our depth measurement device would have started recording and where the first temperature sensor on the tether would have entered the regolith.) The data show that the first 18 cm were done in about 5 minutes and they also show that the mole has been diverted away from vertical by about 15° during that time. The angle can be a few degrees larger or smaller and awaits confirmation after deeper evaluation of the data. As the diversion occurred very rapidly we may conclude that the mole hit an obstacle already close to the surface that it either moved away or more likely passed but that left its attitude somewhat inclined. The mole axis additionally precessed from pointing slightly towards the left forward foot to pointing towards the right forward foot and back again. You might conclude, it worked against that obstacle. After about 5 minutes it kept its attitude mostly and continued hammering for the remainder of the hammering time. One interpretation is that it had hit another obstacle after the first 5 minutes of penetration but it may also have worked through or into a layer of pebbles or gravel. After about 3.5 hours of hammering, it precessed again and changed attitude slightly during about 10 minutes. While it worked on the first obstacle it perhaps lifted the support structure up somewhat but certainly shifted it back towards the lander by about 2 cm as was seen in the animated gif of yesterday.
So, can we better say where the mole is? Team members (Sue, Doris, Troy) used the observed tilt of the mole and the shift of the support structure to estimate its depth and found a value between 28 and 32 cm. This is consistent with the evolution of the motor temperature after sunset that cooled significantly less rapidly than the atmosphere and suggests that the mole is at least partly buried (it is 40 cm long).
What is the feeling in the team? We are a bit worried as we hit one or two obstacles so soon already but tend to be optimistic. That the mole made the first 20 cm in 5 minutes suggests a high penetration rate when unobstructed. Would it have reached even 30 cm in that time, then the penetration rate would have been perhaps unrealistically high. More realistic may be to assume that the mole made the first 20 cm or so rapidly and then penetrated slowly for about 10 cm into some gravel or that it moved an obstacle aside while penetrating 10 cm. Tests with pebbles in sand suggest that the mole takes some hours but can work itself through a layer of pebbles or move a stone out of the way. Geological evidence suggest that the regolith should be mostly sandy. So hopefully we can get past the obstacle on Sunday and get to 70 cm more easily. But we should not forget, we are moving into the unknown.
Keep your fingers crossed!
Logbook entry: 1st March 2019
The mole has hammered for its maximum 4 hours yesterday and has reached a depth of at least 18 cm and not more than 50 cm, but not the planned 70 cm. The data indicate that the mole has reached that depth within about 5 minutes but then soon encountered an obstacle (the exact depth of which is not known).
It worked against this obstacle for the remainder of the time and may have pushed it aside after 3.5 hours as indicated by a slight rotation of the mole. The thermal sensors on the mole and on the science tether indicate that the burial was not more than 50 cm (because the bottommost temperature sensor measured a temperature as expected for the air temperature).
Moreover the temperature sensors on the mole cooled at a rate that suggest that it is at least not completely in the soil. The incident with the obstacle caused the mole to incline by about 15° (to be confirmed) with respect to vertical which caused the support structure on the surface to shift by about 2 cm:
The team is busy planning another round of hammering - again a time by up to 4 hours - to be uploaded today and starting on Saturday. The results are expected to be down Sunday.
Logbook entry: 27th February 2019
The HP3Team has successfully rescheduled the first hammering and thermal conductivity measurement cycle yesterday. This will be reviewed by the JPL/CNES/DLR operations team today (Feb 27th) and then uplinked to the lander on Mars by direct X-Band link tomorrow. The mole should start hammering at shortly after 10 in the morning local Mars time which would be around 8pm in Pasadena or 5am MEZ. The data will come down Friday morning 6:30 PST or 15:30 MEZ. We will, of course, all be gathered at JPL despite our ongoing Science Team Meeting at the Huntington Library here in Pasadena. After hammering for up to 4 hours, the mole will be allowed to cool for almost 3 days to remove heat that was generated in the mole by friction during hammering.
Starting on Sunday and running into Monday the mole will do the first thermal conductivity measurement of the sand that is around it, hopefully at 70cm depth. To do so, the outer hull of the mole will be heated at constant power for 24h and the temperature rise there will be measured as a function of time. Using data from calibration in Berlin, the thermal conductivity can be determined from the time rate of change of the temperature. This will be an important measurement and will be repeated at intervals of 50cm depth thereafter as we go down. We will then have a thermal conductivity-depth profile of the soil (which is correctly called the regolith). Later, when we measure the thermal gradient, we will multiply the thermal conductivity with the thermal gradient to obtain the heat flow, the main goal of the instrument. The data should be down early Tuesday morning Pasadena time.
In addition to the first thermal conductivity measurement on Mars (as far as I know) on Sunday there will be a Phobos eclipse shadow passing through the field of view of our radiometer on early Tueday morning. This will give us a chance to measure the thermal effect of a Phobos eclipse on the surface temperature with our radiometer. There will be two more eclipses on Wednesday and Friday. You may consider consulting e.g., the Wikipedia to find out about eclipses on Mars. I include an older HRSC photo of the Phobos shadow on Mars. The eclipse will pass through comparatively quickly in 20-30 seconds.
Exciting times, stay tuned!
For more details on the experiment take a look here. This is an open access paper describing the HP3 instrument and our DLR web sites.
Logbook entry: 26th February 2019
Unfortunately, I have bad news. Yesterday, the combined InSight OPS team (it consists of JPL, DLR and CNES folks) successfully went through the command list for the day including a review of the HP3 status, the GO for hammering and the hammering commands. The particularities of Mars and Earth rotations, communications orbiter passes with up- and downlink opportunities and working hours here resulted in the commands to be planned for UHF uplink with the morning pass by the NASA Odyssey spacecraft around 6am local time which would have been about midnight in central Europe. Unfortunately, the uplink opportunity was missed yesterday evening for yet unknown technical reasons. The OPS team now plans to use an uplink opportunity by X-band directly to the lander on Thursday which results in a necessity to replan the hammering cycles by the HP3 team. Another two days of delay...
Logbook entry: 24th February 2019
I received confirmation this morning from our System Engineer Jörg Knollenberg that the mole release was successful! That is the mole is now free of its fixation that was protecting it until now from any unwanted movements. It is now ready to go! Tomorrow, Monday the 25th of February, there will be a formal review by the operations team and then the command for the mole to start hammering will be included into the list of commands that will be sent to the lander tomorrow afternoon. Hammering operations will then commence on 10 am Local Mars Time which will be Tuesday shortly before 7 pm pacific or shortly before 2 am in Germany. A confirmation of the successful hammering is expected to be uplinked with the late afternoon pass of the TGO (Trace Gas Orbiter from ESA) which will be at 8:45 am PST or 17:45 MEZ.
Logbook entry: 22nd February 2019
Update: The final GO for Mole release has just been given!
The two recent images from the InSight Fish-eye camera on the lander (ICC) and the camera on the robotic arm (IDC) show HP3 and SEIS on the surface and the arm inspecting the HP3 instrument. The arm camera has taken many more images that will be studied by JPL and DLR scientists in a few hours for a final GO for Mole Release
Logbook entry: 21st February 2019
Excitement is mounting as we are very close to the start of hammering! Yesterday, we received the images that confirm HP3 release and the entire team (all hands out!) celebrated the end of the deployment phase of the mission with a cake. Today, the camera on the arm, the IDC, will inspect the placement of HP3 and the engineering tether, the cable running to the lander. We expect to have these images by tomorrow and will assess them very carefully. Then, the firing of the frangibolts that fix the mole to the housing will be commanded and executed on Mars the following day: Mole release! On Monday, assuming that Mole release is successful – something we should learn Sunday - we will be commanding hammering. The parameters will be set such that hammering will commence at 10:00 LMST (local Mars time) on Tuesday and last for up to 4 hours. We will transmit the hammering data to Earth using a pass of the ESA Trace Gas Orbiter TGO (thank you ESA!) and receive them by 8:45 PST on Wednesday! This will be the moment we all look forward to, the Mole's first 70 centimetres into the Martian surface! Although we have tested the Mole extensively and diligently, there is still an uncertainty. This has never been done before on Mars or on another terrestrial planets. Sure, the Apollo astronauts have drilled to a depth of about 3 metres on the Moon. But theirs was not a robotic mission.
The original logbook from the Principal Investigator including older entries can be found here.
About InSight
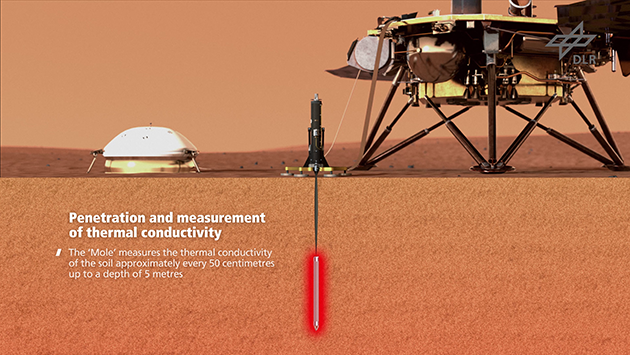
5 May 2018 saw the launch of NASA's InSight mission, in which a lander will carry out geophysical measurements directly on the surface of Mars to explore the planet's inner structure and thermal balance. DLR has contributed to this mission in the form of the Heat Flow and Physical Properties Package (HP3) instrument. On 26 November 2018, InSight touched down north of the equator, on the Elysium Planitia plain.
For the first time since the astronaut mission Apollo 17 in 1972, heat flow measurements will be carried out on another celestial body using a drilling mechanism. The main aim of the experiment is to be able to determine the thermal state of the interior of Mars using heat flow measurements taken beneath the surface. Models of Mars’ formation, chemical composition and inner structure can be checked and refined on the basis of this data. The measurements from Mars can also be used to draw conclusions about Earth’s early development.
The depth achieved by the HP3 Mole can be tracked in the virtual control room!
Follow us on Twitter to get the newest information and pictures of our #MarsMaulwurf.

Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Tags: