
Das Logbuch zu InSight (Februar 2019 bis Juli 2020)

Der wissenschaftliche Leiter des HP3-Instruments, Tilman Spohn, ist seit April zurück in Berlin und steht in engem Austausch mit dem JPL. Er versorgt uns im Logbuch mit den neuesten Entwicklungen der InSight Mission und unserem Instruments HP3, dem #MarsMaulwurf, der sich in den Marsboden hämmert.
+++++ Seit August 2020 veröffentlichen wir die InSight-Updates als Einzelbeiträge hier im DLR-Blog. Artikelübersicht +++++
Logbuch-Eintrag vom 7. Juli 2020
Am Samstag, 20. Juni 2020 (Sol 557 Marszeit) haben wir den im vorigen Logbuch-Eintrag angekündigten Free-Mole-Test beendet. Das Ergebnis entsprach leider nicht unseren optimistischsten Erwartungen, war aber auch nicht völlig überraschend: Der Maulwurf, unsere HP³-Wärmesonde auf der NASA-Mission InSight, begann wieder auf der Stelle zu "hüpfen" – und das, nachdem er noch am 13. Juni beziehungsweise Sol 550 ohne direkte Unterstützung durch die Schaufel am Roboterarm des Landers einige vielversprechende Fortschritte gemacht hatte...
Wir können die Bewegung des Maulwurfs weder direkt auf Bildern verfolgen, da die Schaufel den Blick versperrt, noch haben wir direkte Messdaten, die die Bewegung der Sonde dokumentieren. Stattdessen müssen wir die Situation anhand der Bewegung des Sensoren- und Versorgungskabels unseres Maulwurfs beurteilen oder, genauer gesagt, anhand der Verschiebungen von Markierungen auf dem Kabel relativ zum Bildhintergrund.
Der Free-Mole-Test hatte bereits am Samstag, 13. Juni 2020 (Sol 550) begonnen, aber die damaligen Anzeichen dafür, dass sich der Maulwurf während 125 Hammerschlägen vorwärts in die Tiefe bewegte, waren nicht ausreichend eindeutig. Die Animation oben zeigt, wie die Schaufel zunächst weiter nach unten geht und in den Boden gedrückt wird – so, wie ich es schon in meinem vorigen Blogbeitrag näher beschrieben hatte. Dabei drückt die Schaufel auf das hintere Ende der Sonde. In der Mitte des Videos hört die Schaufel auf, sich zu bewegen und die Staubpartikel in der Schaufel kommen sichtlich zur Ruhe. Dabei bewegt sich das Kabel um einige Millimeter nach rechts!
Beides, die zur Ruhe gekommenen Staubpartikel und die gleichzeitige Bewegung des Kabels, ließen den Schluss zu, dass sich der Maulwurf von der Schaufel weg und von selbst vorwärts bewegt hatte. Bestärkt wurden wir durch die Daten des Neigungsmessgeräts im Maulwurf, das eine leichte Aufrichtung der Sonde anzeigte. Auch das circa einen Meter entfernte Seismometer zeichnete eine Veränderung in der Frequenzcharakteristik der aufgezeichneten Hammerschläge auf.
Die Bewegung des Kabels kehrte sich etwas später für eine kurze Weile um, bevor sich es sich weiter nach rechts bewegte. Dann folgte wieder eine sehr kleine Bewegung nach links, bevor es sich wieder vorwärts bewegte. Eine sorgfältige Analyse der Bilder zeigte: Die Netto-Vorwärtsbewegung des Kabels (und auch des Maulwurfs?) betrug zwei bis drei Millimeter. Die Bruttobewegung könnte drei- bis fünfmal so groß gewesen sein.
Als das Team die Bilder analysierte, waren alle zufrieden, dass der Maulwurf sich offenbar vorwärts bewegt hatte! Wegen der – wenn auch kleinen – Rückwärtsbewegungen waren wir uns allerdings einig, dass wir mindestens einen weiteren Hämmer-Zyklus beobachten müssten, um sicher sagen zu können, dass der Maulwurf nun tief genug im Boden steckte, um von selbst "graben" zu können. Nun, sagen wir, fast allein zu "graben", denn mit der Schaufel sorgten wir immer noch für eine indirekte Unterstützung. Ihr Druck auf die Oberfläche erhöht die Reibung auf die Hülle unseres Marsmaulwurfs.
Wie sehr wir dem Maulwurf auf diese Weise helfen würden, war allerdings nicht vorherzusagen, da wir die mechanischen Eigenschaften des Marsbodens nicht ausreichend genau kennen. Soviel ist klar: Solange der Maulwurf nicht vollständig im Boden, sondern teilweise in seiner Grube stecken würde, ist die Unterstützung zumindest vorteilhaft. Erst ab einer Tiefe von 10 bis 20 Zentimetern würde die Unterstützung selbst unter idealen Bedingungen nicht mehr wirksam sein – und dann voraussichtlich auch nicht mehr nötig.
Eine Woche später, am Sonntag, 21. Juni 2020, prüften wir die neuen Bilder des Hämmerns vom Vortag (siehe Sol 557, Animation unten). Wir stellten fest, dass das Kabel sich hin und her bewegte und dann fünf bis sechs Millimeter nach links. Der Maulwurf war damit einen Großteil seiner Vorwärtsbewegung von Sol 550 wieder zurückgegangen!
Offenbar hatte es nicht gereicht, den Maulwurf einige Zentimeter tiefer im Boden zu haben, selbst mit Unterstützung durch Schaufeldruck auf den Boden nicht. Die in der Mitte des Videoclips einsetzende Bewegung der Staubkörner lässt darauf schließen, dass der Maulwurf wieder an die Schaufel herangekommen war und von unten auf die Unterseite schlug. Wahrscheinlich hat die Schaufel ihn daran gehindert, wie bei früheren Versuchen (z.B. an Sol 322), aus dem Boden zu kommen.
Das Ergebnis des Free-Mole-Tests bestätigt unsere frühere Vermutung, dass die verhärtete Bodenkruste außergewöhnlich dick ist und ziemlich robust sein muss. Aus der ersten Rückwärtsbewegung des Maulwurfs (an Sol 322) und der Beobachtung, dass er nicht weiter als 20 Zentimeter aus dem Boden kam, hatten einige von uns (darunter auch ich) geschlossen, dass die harte Krustenschicht etwa 20 Zentimeter dick sein würde. 40 Zentimeter beträgt die Länge des Maulwurfs, minus 20 Zentimeter, also der Länge, die er herausgekommen war, entspricht eben 20 Zentimetern. Die jetzt vorliegenden Beobachtungen stehen jedenfalls nicht im Widerspruch zu dieser Überlegung.
Wie machen wir weiter?
Als nächstes werden wir den Roboterarm des InSight-Landers zurückzuziehen und mit Hilfe der Instrument Deployment Camera auf dem Arm die Maulwurfsgrube im Inneren stereoskopisch abbilden. Wir müssen wissen,
- wie tief der Maulwurf wirklich im Boden ist (er sollte etwa einen Zentimeter unter der Oberfläche sein),
- ob sich die Morphologie der Grube verändert hat und
- ob der Sand, den wir am Boden der Grube gesehen hatten, noch vorhanden oder weiter in die Tiefe gerutscht ist.
Je nachdem, was die Bilder offenbaren, wollen wir anschließend prüfen, ob wir die Grube mit Sand füllen können, um die notwendige Reibung zu gewährleisten. Dabei werden wir wahrscheinlich wieder durch Druck der Schaufel helfen. Da der Sand flexibler als das feste Krustenmaterial ist, kann die Kraft effektiver übertragen werden. Darüber hinaus könnte die Schaufel wieder verhindern, dass der Maulwurf widrigenfalls aus dem Boden kommt.
Das Füllen der Grube wird keine leichte Aufgabe sein und kann einige Zeit in Anspruch nehmen. Dies war auch der Grund, warum wir den Free-Mole-Test ohne vorherige Befüllung der Grube durchgeführt haben. Eine Schätzung des Volumens der Grube vor dem letzten Hämmern ergab, dass 300 Kubikzentimeter Sand zum Befüllen nötig sein werden. Dieses Volumen kann man erreichen, indem man insgesamt etwa 40 Zentimeter mit der Schaufel "zusammenkratzt". Diese hat eine Breite von sieben Zentimetern und die Sandschicht ist nach unseren Beobachtungen etwa einen Zentimeter dick.
Das Maulwurf-Team wird jetzt allerdings erst einmal eine Pause einlegen. Wir werden die mit dem Vorhaben zusammenhängenden Fragen besprechen und den Roboterarm in der Zeit für andere wissenschaftliche Aktivitäten zur Verfügung stellen. Wenn alles gut geht, werden wir unsere Aktivitäten voraussichtlich im August wieder aufnehmen.
Logbuch-Eintrag vom 3. Juni 2020
Mehr als drei Monate sind seit meinem letzten Blog-Eintrag vergangen. Im Februar musste ich hier berichten, dass sich der Maulwurf leider erneut im "Rückwärtsgang" bewegte und schließlich etwa sieben Zentimeter aus seinem Loch herausragte (die Gründe für die Aufwärtsbewegung sind im Logbucheintrag vom 23. Februar erläutert).
Als Konsequenz des mangelnden Erfolgs beim letzten "Pinning"-Versuch beschloss das InSight-Team, das erhöhte Risiko einer Beschädigung der Sonde einzugehen und einen sogenannten "Back-Cap Push" zu versuchen. Dabei haben wir die Schaufel des Roboterarms am Lander über der Hinterkappe des Maulwurfs platziert und langsam abgesenkt, bis sie diese berührte. Danach haben wir den Arm weiter abgesenkt und so mit der Schaufel eine Kraft von circa 50 Newton auf den Maulwurf aufgebaut, um ihn bei seiner Abwärtsbewegung zu unterstützen. Allerdings nahm die mechanische Spannung im Arm mit dem Vorarbeiten des Maulwurfs in den Marsboden immer weiter ab und war nach circa anderthalb Zentimetern weitgehend abgebaut. Der Arm musste dann neu angesetzt und weiter abgesenkt werden, um erneut Druck aufzubauen.
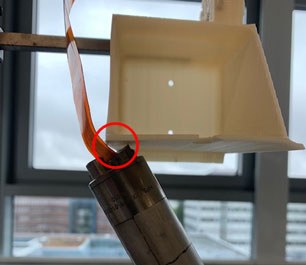
Wegen der Schräglage des Maulwurfs in seiner Grube und der begrenzten Manövrierfähigkeit des Roboterarms des InSight-Landers berührte die Schaufel die hintere Kappe nur am Rand, also nur an einem einzigen Punkt. Das Bild zeigt die Situation, wie sie in einem DLR-Labor in Berlin simuliert wurde. Diese Simulation war nötig, um zu beurteilen, wie kritisch die Platzierung für das empfindliche Messkabel war. Das Bild zeigt deutlich: Ein Fehler in der Positionierung der Schaufel von nur wenigen Millimetern hätte zu einem Abrutschen von der hinteren Kappe oder zur Beschädigung des Kabels führen können. Ein weiteres Risiko für das Messkabel: Wenn sich der Maulwurf in den Untergrund vorarbeitet, bewegt sich die Schaufel relativ zur Sonde nach links und in Richtung Kabel!
Deshalb ging das Team sehr vorsichtig vor. Jedes Mal, wenn die Schaufel in Position war, prüften wir die Situation anhand der Bilder der am Roboterarm befestigten Kamera und der Daten des Armmotors. Erst danach konnte das Kommando für eine Reihe von Hammerschlägen freigegeben werden. Wir begannen vorsichtig mit nur 25 Hammerschlägen. Erst nachdem das Team ein gewisses Vertrauen in die sorgfältige Platzierung der Schaufel gewonnen hatte, erhöhten wir die Anzahl der Hammerschläge auf schließlich 150 Schläge pro Sitzung.
Wie ich bereits früher berichtet habe, erlaubt die gegenwärtige Arbeitsweise der InSight-Mission nur eine Operation pro Woche. Wir befinden uns in einer Phase der Mission, in der die Instrumente Daten liefern und lediglich überwacht werden sollten. Daher ist das Team heute kleiner als vor einem Jahr, als die Instrumente auf der Marsoberfläche abgesetzt wurden. Einige haben inzwischen auch andere Projekte zu betreuen. Und so konnte die Positionierung der Schaufel nur jede zweite Woche erfolgen – meistens samstags. Es folgte, was Raumfahrtingenieure als "Ground-in-the-Loop" bezeichnen, das heißt eine Überprüfung der Schaufelposition am Montag danach, bevor der Startschuss für die nächste "Hämmersession" gegeben wurde, meistens für den darauffolgenden Samstag.
Wir haben an Sol 458, dem 11. März 2020 Erdzeit, etwa sieben Zentimeter über der Oberfläche begonnen und sind an Sol 536 (30. Mai) nach sechs Hämmerzyklen beziehungsweise elf Wochen mit der Schaufel wieder auf Höhe der Oberfläche. Die Animation zeigt das Eindringen bis Sol 536:

Wahrscheinlich haben wir mit dem letzten Hammerschlag mit der linken Kante der Schaufel die Oberfläche erreicht. Vielleicht sind wir aber auch noch etwa einen Millimeter darüber. Offensichtlich haben wir es mit einem schrägen Winkel der Schaufel zur Oberfläche zu tun, sodass die rechte Kante der Schaufel noch etwa einen Zentimeter über der Oberfläche liegt. Und wir wissen, dass die Oberfläche an vielen Stellen mit etwa einem Zentimeter relativ lockerem Sand bedeckt ist, den die Schaufel komprimieren kann.
Als nächstes werden wir daher ein weiteres Hämmern mit 100 Schlägen kommandieren, nachdem die Schaufel wieder so positioniert wurde, dass sie auf die hintere Kappe der HP3-Sonde drückt. Dabei hoffen wir, dass die Schaufel nach einigen Schlägen vom Boden aufgehalten wird. Der Maulwurf könnte sich dann von selbst vorwärts bewegen können.
Jetzt wissen wir: Der Maulwurf wurde nicht durch einen Stein gestoppt
Erinnern Sie sich an unsere Theorie, dass der Maulwurf nicht in den Marsboden eindrang, weil das Regolith ihm nicht genug Reibung bot, um die Rückstoßkraft beim Hämmern des Maulwurfs auszugleichen? Obwohl der Rückstoß viel geringer als die Kraft ist, die den Maulwurf vorwärts treibt – fünf bis sieben Newton im Vergleich zu 900 Newton – muss der Rückstoß dennoch aufgefangen werden. Berechnungen, die ich bereits früher in diesem Blog diskutiert hatte, legen nahe, dass die Reibungskraft ausreichen wird, wenn der Maulwurf vollständig begraben ist. Etwas zusätzliche Reibung kann erzeugt werden, wenn wir den Arm des InSight-Landers benutzen, um die Oberfläche zu belasten. Das werden wir tun.
Sollte der Maulwurf von sich aus in den Boden vordringen (mit zusätzlichem „Regolith-Schub“ durch die Belastung des Bodens mit der Schaufel), wird die Reibung immer weiter zunehmen und die Aufgabe einfacher. Wenn die Rückenkappe des Maulwurfs etwa 20 Zentimeter tief ist, wird der Druck auf die Oberfläche wirkungslos und die Unterstützung der Schaufel nicht mehr erforderlich sein. Dann können wir mit dem beginnen, was wir vor mehr als einem Jahr geplant haben: dem Maulwurf befehlen, in die Tiefe zu hämmern.
Sie sehen also, der nächste Schritt, der „Free Mole Test“, wird sehr aufregend und entscheidend sein. Darum bleibt mein Apell wie immer: Bleiben Sie dran und drücken Sie uns und dem Maulwurf die Daumen!
Es wäre gut, wenn der Maulwurf den Test bestünde. Denn bald wird es Winter auf der Nordhalbkugel des Mars und die Staubsturm-Saison wird beginnen. Schon jetzt wird die Atmosphäre trüber und die Leistung der Solarpaneele nimmt ab. Das wird unserer Möglichkeiten mit dem robotischen Arm zu arbeiten, leider etwas einschränken.
Und erlauben Sie mir zum Abschluss dieses Posts in der augenblicklichen Situation auf der Erde eine Ergänzung: Es ist wunderbar, wie Menschen über große Entfernungen auf der Erde, von zu Hause aus und bis zum Mars zusammenarbeiten können. Vielen Dank, liebes InSight-Team!
Logbuch-Eintrag vom 21. Februar 2020

Liebe Freunde des Mars-Maulwurfs und der InSight-Mission,
der Mars und unsere Wärmeflusssonde HP³, der "Maulwurf", machen unser Leben weiterhin ... wie soll ich sagen ... interessant. Sie erinnern sich vielleicht an die Probleme, die wir im vergangenen Oktober mit dem Maulwurf hatten: Statt sich tiefer in den Marsboden zu arbeiten, bewegte er sich rückwärts, aus dem Boden hinaus. Zu Weihnachten hatten wir ihn dann wieder fast vollständig in den Boden gebracht. Noch zwei bis drei Zentimeter mehr und wir hätten das Pinning - das Drücken mit der Schaufel auf die Seitenwand des Maulwurfs für einen erhöhten "Grip" - beenden können. Bei dieser Eindringtiefe hätte die Sonde nur noch wenige Zentimeter aus dem Boden geragt und nicht mehr genügend Oberfläche geboten, um mit der Schaufel sicher gegen den Maulwurf zu drücken. Für die erste Woche 2020 hatten wir ein letztes Pinning sowie eine Reihe Hammerschläge geplant und kommandiert.
Da wir jedoch vor Weihnachten einen Rückgang der Abwärtsbewegung beobachtet hatten, beschlossen wir, das Pinning der Schaufel vor Beginn des Hämmerns neu zu justieren. Um Zeit zu sparen, haben wir dabei einen anderen Ansatz als zuvor gewählt: Anstatt die Schaufel ganz vom Maulwurf zu entfernen und dann neu in Position zu bringen, lösten wir den Druck kurz und zogen ihn dann wieder an. Als wir am Sonntag, 12. Januar 2020, in den frühen Morgenstunden die aktuellen Bilder vom Mars studierten - das Hämmern erfolgte am Vortag, also am Samstag unserer Zeit oder Sol 407 auf dem Mars -, waren wir zunächst verwirrt: Wir hatten nur ein Bild. Irgendwo gab es ein Problem, das eine Verzögerung bei der Datenübertragung verursacht hatte.
Als am späten Sonntagabend endlich alle Bilder verfügbar waren, stellten wir fest, dass sich der Maulwurf wieder ein Stück nach oben gearbeitet hatte! Die detaillierten Bilder (siehe Animation) zeigten deutlich, dass er sich mit den ersten 20 Schlägen um etwa 1,5 Zentimeter tiefer gegraben hatte und sich die Bewegung dann - bedauerlicherweise -umkehrte: Der Maulwurf legte für die restlichen 110 Schläge 3,5 Zentimeter "im Rückwärtsgang" zurück... Das ist zwar nur die Hälfte der Länge, die er während Sol 325 Ende Oktober 2019 zurückgewichen war. Dennoch: Es war äußerst ungünstig und rätselhaft. Unser Nachziehen des Pinnings war offenbar nicht erfolgreich gewesen. Aber warum bewegte sich der Maulwurf zuerst vorwärts, bevor er dann die Bewegung umkehrte?

Eine mögliche Erklärung für diese Beobachtung ist die Rückstoßkraft. Ihr wirken wir ja mit dem Pinning entgegen. Und sie hängt vom Widerstand des Bodens ab, in den der Maulwurf eindringt. Je härter der Boden ist, desto größer ist die Rückstoßkraft. Darüber hinaus stellten wir fest, dass der Maulwurf diesmal in fast der gleichen Tiefe anfing zurückzuweichen wie im vergangenen Oktober. Eine Erklärungsmöglichkeit besteht darin, dass wir den Druck der Schaufel, das Pinning, ausreichend für den bereits gelockerten Boden dosiert hatten. Für den "frischen" Boden war der Druck nicht ausreichend. Außerdem könnte der Boden vor der Maulwurfspitze durch das vorherige Hämmern verdichtet worden sein. An dem Punkt, an dem der Maulwurf auf verhärteten Boden gestoßen war, setzte die Rückwärtsbewegung ein. Es ist zudem möglich, dass der stärkere Rückstoss das Pinning teilweise gelockert hat.
Nach dieser Erfahrung und nach Abwägung aller Optionen hat sich das InSight-Team jetzt entschieden, die Pinning-Technik nicht erneut anzuwenden. Nun wollen wir die Schaufel gegen die Rückenkappe des Maulwurfs drücken. Ein Grund für diese Entscheidung war, dass wir den Maulwurf ohnehin unter der Oberfläche haben wollten. Das wäre mit der Pinning-Technik nicht machbar, über ein Schieben allerdings schon.
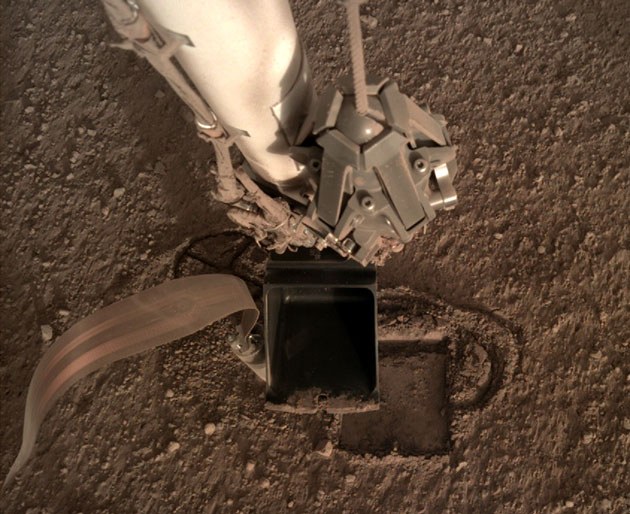
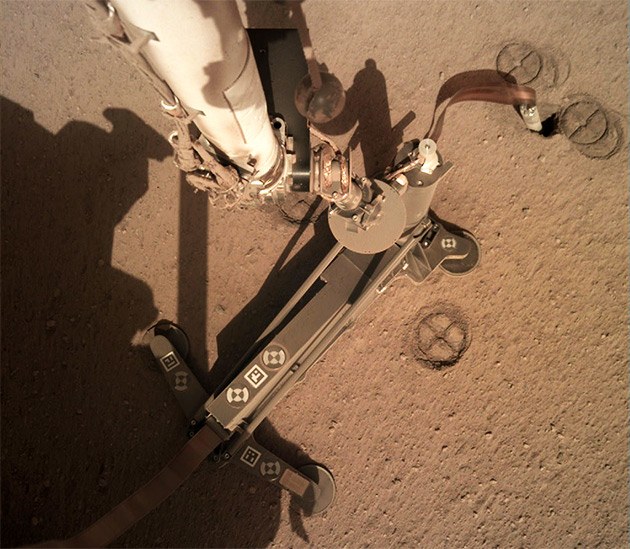
Nach den bisherigen Erfahrungen bei der Bedienung der Schaufel wuchs darüber hinaus bei uns allen die Zuversicht, dass das Risiko einer versehentlichen Beschädigung des Kabels mit seinen Strom- und Datenleitungen das aus der Rückenkappe hinaus führt, gering genug ist. In dieser Woche wurde die Schaufel über der Rückenkappe positioniert (siehe Bild oben). Das Schieben wird in den nächsten Wochen beginnen. Zuvor werden wir die Position der Schaufel allerdings sorgfältig überprüfen und gegebenenfalls nachjustieren.
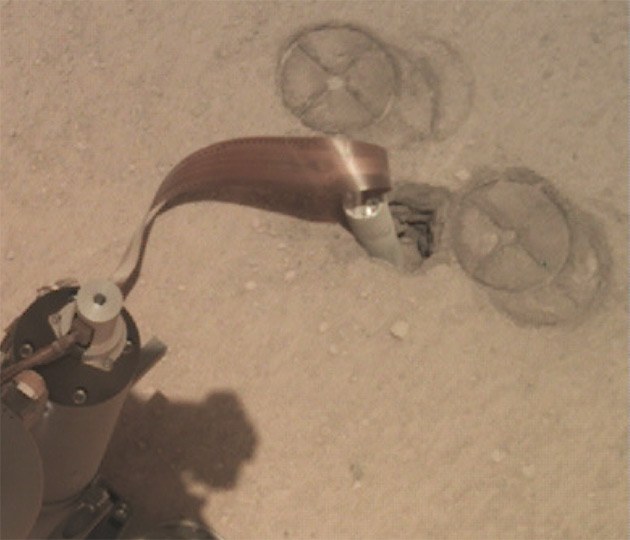
Vorher hatte das Team die Schaufel für zwei Experimente zur Vorbereitung einer möglichen Befüllung der Bohrstelle verwendet: Zunächst wurde erfolgreich gezeigt, dass der Rand der Grube mit der Schaufelspitze zum Einsturz gebracht werden kann. Der eingestürzte Kraterrand fiel in die Grube und füllte sie teilweise auf. Zweitens wurde gezeigt, dass mit der Schaufel loser Sand an der Oberfläche zusammengekratzt und in Richtung Grube bewegt werden kann. Beide Techniken können schließlich dazu verwendet werden, die Grube zu füllen. Danach könnten wir auf die Oberfläche des verfüllten Sandes drücken und so die Reibung auf den darunter liegenden, zugeschütteten Maulwurf gewährleisten.
Logbuch-Eintrag vom 23. Dezember 2019
Zunächst einmal allen frohe Weihnachten und einen guten Rutsch ins Neue Jahr!

Wie Sie im Bild links sehen können, haben wir den Maulwurf heute annähernd so tief wieder in den Boden bringen können, wie vor dem Rückschritt Ende Oktober, Marstag 322 (seit der Landung vor etwa einem Jahr). Damals war die Sonde wieder aus dem Boden herausgekommen, wie Sie sich vielleicht erinnern werden. Wir haben dazu den Maulwurf mit der Schaufel festgeklemmt, so wie wir es vor Sol 318 taten. Wir hatten damals das „Pinning“ aufgegeben, weil die Sonde so tief im Boden eingedrungen war, dass die Gefahr bestand, bei weiterem Eindringen das Messkabel zu beschädigen.
Das Wiedereindringen wurde in mehreren Schritten (Sols 346, 349, 366, 373 und 380) erreicht. Die Zahl der Hammerschläge wurde mit großer Vorsicht festgelegt, um vor Überraschungen – so weit möglich – sicher zu sein.
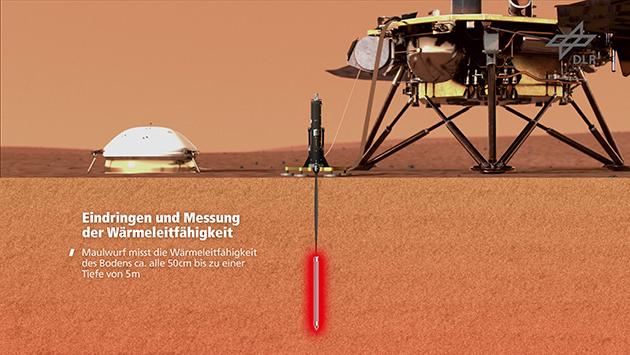
Über Weihnachten werden die Sonde und andere Sensoren des HP3 Pakets selbstständig einige vorab kommandierte Messungen durchführen. Das Infrarot-Radiometer wird drei Eichmessungen vornehmen. Mit dem Maulwurf werden wir die Temperatur des Bodens und seine Wärmeleitfähigkeit bestimmen. Diese Messungen werden uns helfen, die physikalischen Eigenschaften des Marsbodens zu bestimmen.
Obwohl HP3 noch nicht die eigentlich geplante Wärmeflussmessung durchführen konnte, wurden doch einige interessante bodenkundliche Untersuchen durchgeführt, die bei unserer Rettungsmission sozusagen anfielen. So konnte der Widerstand des Bodens gegenüber dem Eindringen der Sonde zu 300kPa bestimmt werden. Aus diesem nicht sehr hohen Wert lässt sich eine Porosität der Durikruste von mindestens 50 Prozent ableiten (Der Widerstand des Bodens ist nicht so sehr das Problem. Es ist, wie wiederholt gesagt, die fehlende Reibung in der Durikruste). Der genannte Widerstand von 300kPa entspricht in etwa der aus dem Hacken mit der Schaufel bestimmten Festigkeit des Bodens von 350kPa (bestimmt aus der Kraft des Arms und den Dimensionen der Spitze der Schaufel).
Natürlich haben wir uns auch Gedanken darüber gemacht, warum der Maulwurf an Sol 325 rückwärts hämmerte. Die für mich überzeugendste Erklärung nimmt an, dass sich unter der Durikruste der für den Marsboden vermutete kohäsionslose Sand befindet. Da die durch das Drücken mit der Schaufel aufgebrachte Vertikalspannung zwischen Sol 322 und 325 nachgab und damit die Reibungskraft nachließ, begann der Maulwurf beim Hämmern zu hüpfen. Bei der Aufwärtsbewegung floss dabei Sand unter die Spitze und füllte zum Teil das Loch. Beim nächsten Hammerschlag wiederholte sich dies, bis sich die Spitze der Sonde aus der Sandschicht herausgearbeitet hatte. Der Betrag, um den der Maulwurf sich wieder nach oben gearbeitet hatte, wäre demnach ein Maß für die Dicke der Durikruste: etwa 20 Zentimeter.
Im neuen Jahr werden wir am 6. Januar die Arbeiten wieder aufnehmen. Bis dahin werden wir die nächsten möglichen Schritte diskutieren: Dazu gehören nochmal etwa 100 Schläge mit Pinning, Drücken auf das Ende der Sonde mit einer gewissen Vorspannung, Drücken auf den Boden wie zu Sol 318 und ein Verfüllen des Lochs. Nicht alles wird unbedingt nötig oder angeraten sein, aber dies sind die Möglichkeiten, die es zu besprechen gilt.
Ich wünsche Ihnen schöne Festtage!
Auf Wiedersehen im Neuen Jahr
Logbuch-Eintrag vom 28. Oktober 2019
Neue Überraschungen vom Mars: Unglücklicherweise mussten wir feststellen, dass der Maulwurf nicht wie geplant tiefer in den Marsboden eingedrungen ist, sondern sich wieder nach oben gearbeitet hat. Wie kann das sein? Schließlich hat diese Sonde keinen Rückwärtsgang, wie sie etwa die Sonde auf dem Beagle-II-Lander hatte, der 2003 mit Mars Express zum Roten Planeten geflogen war und dort leider zerschellt ist. Die damalige Sonde war ein Probensammler, der eindringen, Proben entnehmen und wieder zurückbringen sollte. Mit unserem HP3-Maulwurf auf der InSight-Mission wollen wir "nur" nach unten.
In der Tat ist das Phänomen einer sich rückwärts bewegenden Sonde bei geringem Atmosphärendruck nicht unbekannt und wurde im Labor bei sehr niedrigen Drücken beobachtet. Wenn der Maulwurf im Bohrloch nach einem Hammerschlag zurückspringt, entsteht an der Spitze ein Hohlraum, in dem der Druck geringer als der Atmosphärendruck ist. Dieser kann dann – bei genügend hohem Atmosphärendruck – der Rückwärtsbewegung entgegenwirken, ganz ähnlich wie ein Saugnapf festgedrückt wird. Auf dem Mars ist der Atmosphärendruck allerdings mit 0,6 Prozent des Atmosphärendrucks der Erde so gering, dass dieser Effekt vernachlässigt werden kann. Es kommt hauptsächlich auf die Reibung auf der Wand der Sonde an. Diese Reibungskraft ist die Kraft, auf die wir uns verlassen müssen, um den unvermeidlichen Rückschlag aufzufangen. Damit die Sonde aber tatsächlich rückwärts läuft, braucht es neben dem mehr oder weniger freien Weg nach oben im "Bohrschacht" noch ein zumindest teilweises Kollabieren des Bohrlochs unterhalb der Spitze während der Rückwärtsbewegung.
Als wir die Bilder des letzten erfolgreichen Hammerns analysiert haben ist uns aufgefallen, dass der Fortschritt gegen Ende geringer war als davor. Wir haben diese Beobachtung zum Anlass genommen, relativ vorsichtig weiter vorzugehen und die Zahl der programmieten Hammerschläge von 500 auf 150 zu verringern. Darüber hinaus haben wir ein Nachjustierung des Drucks der Schaufel auf den Boden nach den ersten 150 Schlägen kommandiert. Wir hatten damit gerechnet, dass die Sonde möglicherweise – wenn es ungünstig laufen würde – nicht tiefer eindringen oder vielleicht ein wenig rückwärts laufen würde, aber niemals so schnell wie jetzt beobachtet, nach 30 bis 50 Schlägen, und niemals soweit. Nun ja, agieren auf dem Mars ist nicht nur zeitaufwendig, sondern immer voller Überraschungen. Das Zusammenspiel von geringem Atmosphärendruck, geringer Schwerkraft, wenig bekannten Bodeneigenschaften und der Dynamik der Sonde ist eine echte Herausforderung!
Was also tun? Zunächst wollen wir sicherstellen, dass die Sonde nicht vollständig umkippt. Dann wollen wir das Loch inspizieren, das die Sonde möglicherweise weiter vertieft hat. Danach könnten wir das Einklemmen widerholen und den Maulwurf dorthin zurückbringen, wo er vor dem letzten Hämmern war. Und danach müssen wir sehen, wie wir hämmern, ohne eine erneute Rückwärtsbewegung auszulösen. Geben Sie uns noch etwas Zeit zum Nachdenken!
Die Angelegenheit ist nicht "gegessen", auch wenn es uns der Maulwurf wirklich nicht einfach macht! Zum Glück haben wir ein hervorragend zusammenarbeitendes Team von JPL und DLR – und dankenswerterweise die Unterstützung von NASA und DLR. Unser Ziel bleibt nach wie vor, auf drei bis fünf Meter Tiefe zu kommen.
Logbuch-Eintrag vom 25. Oktober 2019
Weitere gute Nachrichten vom Mars! Der Maulwurf hat sich weiter eingegraben, auch nach dem Loslassen der Schaufel!
Am Marstag 318 hat unsere HP3-Sonde, der Maulwurf, 150 Hammerschläge ausgeführt. Sie hat sich dabei – mit dem "Grip" durch die Schaufel weitere 1,5 Zentimeter in den Grund vorgearbeitet. Insgesamt sind das nun vier bis fünf Zentimeter. Ein weiteres Vordringen in den Marsboden, eingeklemmt durch die Schaufel, wäre nicht mehr sicher gewesen: Der Maulwurf hätte unter die Schaufel rutschen, der robotische Arm mit der Schaufel unkontrolliert zur Seite schwingen und das wertvolle Messkabel beschädigt werden können. Daher wurde der Arm mit Schaufel zu Sol 319 leicht zur Seite bewegt, um die mechanische Spannung im robotischen Arm abzubauen.

Für Sol 322 kommandierte das Team für die Schaufel eine Seitwärtsbewegung um etwa einen weiteren Zentimeter sowie eine Vertikalbewegung von bis zu vier Zentimetern. Damit sollte sichergestellt werden, dass die Schaufel kräftig auf den Boden drückt, um das weitere Hämmern auf diese Weise zu unterstützen. Diese Verfahrensweise ist nicht so effektiv wie das bisherige Einklemmen, aber besser als ganz ohne Hilfe weiter zu hämmern. Die zusätzliche Last auf dem Boden durch das Drücken dürfte etwa doppelt so groß sein wie die Auflast alleine durch den Marssand.
Vorsichtshalber wurden aber nur 50 Schläge kommandiert, da vor dem Beginn des Hämmerns nicht kontrolliert werden konnte, ob die kommandierten Armbewegungen auch ausgeführt worden waren. Die Bilder, die am Abend des 23. und am Morgen des 24. Oktobers zur Erde gefunkt wurden, zeigen uns, dass alles richtig ausgeführt wurde und die Sonde auch unter diesen Umständen weiter eingedrungen ist.
Die gegenwärtige Eindringrate ist vergleichsweise gering. Sie ist etwa um den Faktor 10 kleiner als anfänglich auf dem Mars und deutlich kleiner als im Labor unter Erdbedingungen. Dies kann daran liegen, dass der Boden durch die rund 8000 Schläge auf der Stelle im März verfestigt wurde. Es kann aber auch sein, dass der Maulwurf zurzeit durch kieseligen Sand bohrt oder sich – weniger wahrscheinlich – um einen Stein herum arbeitet. Wir erwarten generell, dass die Eindringrate mit der Tiefe wegen des zunehmenden Drucks abnimmt. Unter den gegenwärtigen Umständen könnte sie aber auch für eine Weile zunehmen.
Für Marstag 325 wurden nun zweimal 150 Hammerschläge kommandiert. Dazwischen wird der Druck der Schaufel nachjustiert. Bei Erfolg wird die Zahl der Schläge weiter erhöht werden. Wir hoffen, dass die Sonde im Laufe der nächsten wenigen Wochen vollständig im Boden verschwindet. Wir würden dann die Schaufel wegnehmen und die Haltestruktur wieder nahe über das Loch zurücksetzen, damit das Messkabel möglichst gut beim weiteren Eindringen aus der Haltestruktur herauslaufen kann.
Logbuch-Eintrag vom 18. Oktober 2019
Gute Nachrichten vom Mars! Der Maulwurf hat sich in drei Hammer-Sessions, die ab 8. Oktober 2019 liefen, gut zwei Zentimeter in die Tiefe bewegt. Eine exakte Messung ist schwierig, weil wir keine Stereobilder zur Verfügung haben. Insgesamt waren 220 Hammerschläge nötig, erst vorsichtige 20 und danach weitere zwei Mal 100 Schläge. Die eindeutige Vorwärtsbewegung ist ein gutes Zeichen und bestärkt uns in der Hypothese, dass dem Maulwurf die Reibung, sozusagen der "Grip", fehlte.

Wir planen jetzt, den Maulwurf weiter bis unter die Marsoberfläche zu versenken und unterstützen ihn dabei weiter durch den seitlichen Druck der Schaufel des Roboterarms des InSight-Landers. Dann müssen wir sehen, ob er alleine vorankommt. Wir werden den Boden mit der Schaufel belasten um in geringen Tiefen etwas mehr Druck auf den Maulwurf zu ermöglichen. Die Animation zeigt den Fortschritt im Zeitraffer in drei Schritten nacheinander.
Während des Eindringens hat sich der Maulwurf um etwa 10 Grad um die eigene Achse gedreht. Dies anfänglich etwas mehr, in der dritten Hammer-Perioden etwas weniger. Wir kennen diese Rotation aus Tests mit dem "Double" auf der Erde, behalten sie aber im Blick. Sobald das Flachbandkabel im Boden ist, sollte sich die Rotation weiter reduzieren, da es die Sonde stabilisiert wie der Kiel ein Schiff auf See.
Logbuch-Eintrag vom 7. Oktober 2019
Willkommen zurück nach der solaren Konjunktion! Ende August hatte ich berichtet, dass die Mission bis 10. September pausieren würde, da der Mars von der Erde aus gesehen hinter der Sonne vorbeiziehen würde und in der Zeit für uns unerreichbar im Funkschatten liege. Erst danach können die Arbeiten mit HP3 wieder aufgenommen werden. Ich hatte auch berichtet, dass wir die Versuche, den Krater um den Maulwurf zum Einsturz zu bringen, wahrscheinlich erst einmal aufgeben würden. Stattdessen würden wir versuchen, den Maulwurf mit der Schaufel am robotischen Arm direkt einzuklemmen. Das würde das Risiko einer mechanischen Beschädigung etwas erhöhen, aber weitere Arbeiten am Krater würden zu viel unserer beschränkten Zeit kosten. In der Tat hat das Projektmanagement diesem Plan zugestimmt. Die Vorbereitungen für dieses komplizierte Manöver haben wir getroffen und inzwischen weitgehend abgeschlossen.
Zunächst musste ein Problem mit dem Rechner, der Back-End-Elektronik (BEE) des HP3-Instruments, gelöst werden. Wir hatten schon vor der Konjunktion des Mars einige Radiometerdaten gesehen, die unsinnige Werte enthielten. Offenbar waren Werte im Massenspeicher des Rechners überschrieben worden. Es lag nahe, sogenannte "Bit-flips" als Ursache zu vermuten. Diese können auftreten, wenn Teilchen der kosmischen Strahlung den Massenspeicher treffen. Dieses Problem ist in der Raumfahrt bekannt und darf auf dem Mars wegen der relativ dünnen Atmosphäre erwartet werden. Meist lässt sich das Problem mit einem Reboot des Rechners lösen, was auch hier der Fall war.
Man kann das Problem weitgehend vermeiden, indem man kritische Bereiche redundant auslegt und den Computer die Daten vergleichen und bewerten lässt. Diese Technik konnte in unserer BEE wegen des beschränkten Massenspeichers nur teilweise umgesetzt werden. Das Team wollte sicher sein, dass die Bit-flips keine Kommandierungsfehler auslösen. Deshalb wurde das Design der BEE und die Programmierung nochmal einem kritischen Review unterzogen. Währenddessen konnte das JPL-Team, das den robotischen Arm betreut, das Einklemmen, "Pinning" genannt, in ihrem Marslabor üben.
Vergangene Woche war nun alles soweit. Die Schaufel haben wir auf dem Mars über dem Maulwurf positioniert und dann langsam an das Instrument herangeführt. Das Bild zeigt die Stellung des Arms am vergangenen Donnerstag. Der Neigungsmesser STATIL im Maulwurf registrierte eine kleine Neigungsänderung um etwa ein halbes Grad, als die Schaufel am Maulwurf anstieß. Dieser Wert ist gut, zeigt er doch, dass der Maulwurf fest im Boden steckt und wahrscheinlich an Teilen des Rumpfs Reibungskontakt hat. Am Donnerstag wurde dann eine Vertikalbewegung des Arms kommandiert, sodass die Schaufel etwa zwei Zentimeter tiefer heruntergleitet.
An Sol 308 Marszeit, also morgen, am 8. Oktober MESZ, wird dann zum ersten Mal seit Ende März wieder gehämmert. Und dieses Mal nicht aus diagnostischen Gründen, sondern in der Hoffnung, dass der Maulwurf weiter in den Marsboden eindringt! Mittwochnachmittag sollten wir die Daten haben. Abends (MESZ) wird dann per Webkonferenz mit den amerikanischen Kolleginnen und Kollegen diskutiert, wie wir weiter verfahren.
Die Anzahl der Hammerschläge wurde zunächst auf 20 beschränkt. Dies ist im Vergleich zu den 4000 Schlägen beim ersten regulären Hammerversuch wenig. Die Maßgabe war allerdings, dass der Maulwurf auf keinen Fall so weit vorankommen soll, dass die Schaufel das Messkabel am Ende des Instruments abreißen könnte. Eine sehr konservative Abschätzung kam auf acht Hammerschläge, die wir dann auf 20 erhöht haben. Dahinter steckt auch die gegenteilige Befürchtung, dass der Maulwurf bei zu wenigen Hammerschlägen keinen messbaren Fortschritt machen könnte.
Bis dahin, bleiben Sie uns gewogen und helfen Sie beim Daumendrücken!
Logbuch-Eintrag vom 27. August 2019
Ich hoffe, Sie genießen den ausklingenden Sommer!
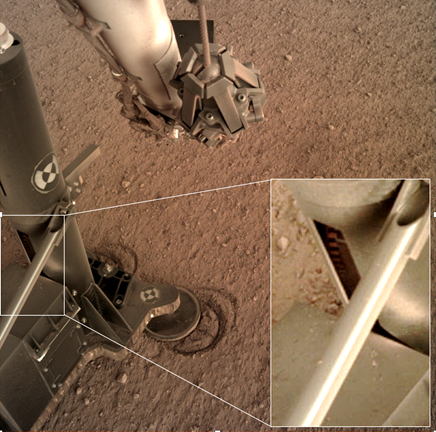
Anfang Juli hatte ich berichtet, dass wir die Haltestruktur, die sogenannte Support Structure Assembly oder SSA, erfolgreich weggenommen und damit den Maulwurf freigelegt hatten. Sie werden sich erinnern, die SSA beherbergte den Maulwurf und die Mess- und Datenkabel vor dem Ausbringen auf der Marsoberfläche. Die SSA saß direkt über dem Maulwurf und blockierte den Blick auf das Gerät. Indem wir die SSA entfernten, konnten wir die Lage des Maulwurfs besser in Augenschein nehmen (Bild 1) und den Weg frei machen, damit der robotische Arm mit dem Maulwurf oder dem Boden würde arbeiten können.
Dabei zeigte sich zunächst, dass wir gut geschätzt hatten: der Maulwurf steckt tatsächlich 35 cm tief im Boden! Damit war auch klar, dass der Maulwurf die Führungsfedern der SSA verlassen hatte, als er nicht mehr weiter eindrang. Dies bestärkt uns in unserer Vermutung, dass der Boden nicht die erwartete Reibung aufbringt, um den Maulwurf weiter vorankommen zu lassen. Es wäre ein (natürlich nicht völlig auszuschließender) Zufall, wenn ausgerechnet in 35 cm Tiefe ein genügend großer Stein liegen würde, der den Weg des Maulwurfs blockiert.
Die Vermutung fehlender Reibung wurde weiter bestärkt, als wir das große Loch sahen, das der Maulwurf gegraben hatte. Dieses Loch hat einen Durchmesser von etwas mehr als zwei Durchmesser des Maulwurfs (2x2,7cm). Der Maulwurf muss wie ein Kreisel gegraben haben und sich dabei im Uhrzeigersinn um etwa 135° um die eigene Achse gedreht haben. Letzteres lässt sich aus der sichtbaren Verdrehung des Flachbandkabels schließen.
Eine spätere Aufnahme unter besserer Beleuchtung (Bild 2) zeigt den Boden des Lochs, in einer Tiefe von etwa 3 Maulwurfsdurchmessern (7-8 cm). Dieses Bild zeigt auch, dass offenbar eine feste Kruste über recht lockerem Sand liegt. Die Wand dieser Kruste ist fast senkrecht und offenbar stabil, so dass eine gewisse Festigkeit vermutet werden muss. Sie zeigt außerdem Kiesel und/oder Konglomerate und eventuell Hohlräume. Die Interpretation der Geologen ist, dass wir hiermit einen Anschnitt der sogenannten Duricrust freigelegt haben (von "durus" für hart und "crusta" für Kruste). Der Term wird in der Marsforschung allgemein für feste Kruste gebraucht, die wohl aus zementiertem Sand besteht.

Damals im Juli herrschte die Meinung vor, dass die Duricrust durch Auflast leicht zum Einsturz gebracht werden könnte. Es wurde daher beschlossen, dass der ursprüngliche Plan, durch Auflast auf dem Boden die Reibung auf der Maulwurfhülle zu erhöhen, weiter verfolgt werden sollte. Nur müsste vorher das Loch zum Einsturz gebracht werden. Dazu wurde während insgesamt drei Sitzungen jeweils zweimal mit der Schaufel des robotischen Arms auf den Boden gedrückt. Das erste Drücken geschah mit der flachen Seite der Schaufel Mitte Juli (Bild 3).
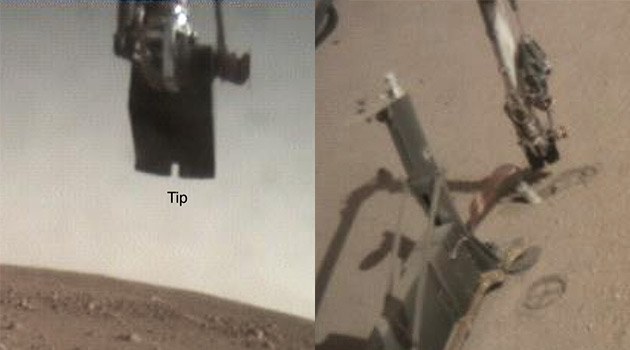
Danach mit der Spitze der Schaufel wie in Bild 4a und b. Dem folgten drei weitere Versuche mit der Spitze und abschließend ein Versuch mit der flachen Seite. Da der Arm eine Kraft von etwa 50 N ausübt entsprach das Drücken mit der flachen Seite einem Druck von 10 kPa und mit der Spitze einem von 300 kPa.
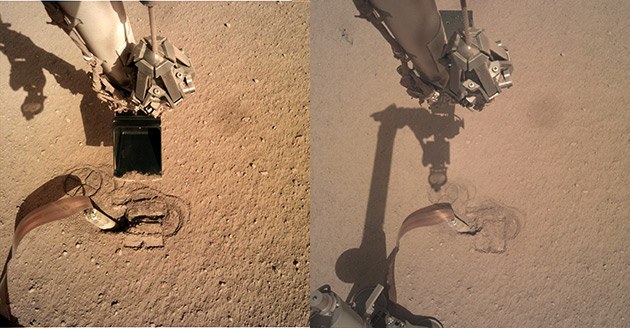
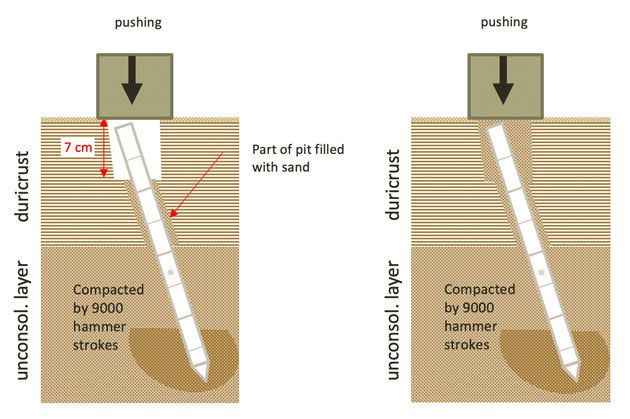
Bild 5 zeigt das Ergebnis der "Gartenarbeit" mit der Spitze und Bild 6 das finale Ergebnis Mitte August. Es muss festgehalten werden, dass das Loch in der Duricrust nicht eingedrückt werden konnte, entgegen der ursprünglichen Vermutung. Lediglich rechts vom Loch ist etwas eingestürzte Kruste zu sehen. Dies ist wohl auf eine lokale Schwäche der Kruste zurückzuführen. Dennoch ist das Loch um etwa die Hälfte der Tiefe aufgefüllt worden. Insgesamt scheint es mir so zu sein, dass die Kruste eine Festigkeit vom mindestens einigen 100kPa aufweist und dass auf ihr eine Schicht lockeren Materials von circa 1 cm Dicke liegt. Dieses Lockermaterial wurde eingedrückt und zum Teil in das Loch verfüllt.
Diese lockere Schicht ist auch jene, welche die Markierungen der Füße der SSA aufweist. Die abgeschätzte Festigkeit der Kruste konnten wir nun auch aus den Aufzeichnungen unseres Neigungsmessers ganz am Anfang des Eindringens im März bestätigen. Diese Aufzeichnungen zeigen, dass der Maulwurf die SSA hochgehoben haben muss, während er sich etwa 7 cm in den Boden arbeitete. Danach setzte sich die SSA wieder, was darauf hindeutet, dass die Festigkeit in größerer Tiefe geringer ist. Aus den Daten erhält man einen Widerstand des Bodens gegen das anfängliche Eindringen von 300 kPa. Zusammen mit den jetzigen Abschätzungen ergibt sich daher ein geschlossenes Bild einer circa 10 cm dicken Duricrust über Lockermaterial.
Wir geht es nun weiter? Zunächst einmal muss eine Zwangspause eingehalten werden. Ab Mittwoch, dem 28. August 2019, verschwindet der Mars hinter der Sonne - ein Vorgang, den wir als Solare Konjunktion bezeichnen.
In dieser Zeit ist eine Kommunikation mit dem Lander unmöglich. Daher wurde der Lander vorsorglich in eine Sicherheitskonfiguration versetzt. Ab dem 10. September kann die Kommunikation wieder aufgenommen werden. Der Lander muss erst einmal dahingehend gecheckt werden, ob alle Systeme die Pause gut überstanden haben. Danach kann weiter gearbeitet werden. Einige von uns nutzen die Zeit für einen Urlaub, andere denken über weitere Schritte nach. Mein Vorschlag ist, das Verfüllen zunächst nicht weiter zu verfolgen, sondern mit dem Arm direkt auf den Maulwurf zu drücken. Das bedeutet zwar, ein höheres Risiko einzugehen - meines Erachtens lässt sich das im Hinblick auf die Zeit jedoch rechtfertigen. Wir werden Anfang September sehen, wie sich das Projekt entscheidet.
Logbuch-Eintrag vom 1. Juli 2019
Gute Nachrichten! Die Haltevorrichtung SSA wurde vorgestern sicher abgestellt, etwa 20 cm Richtung Lander (siehe GIF). Dabei wurde die Haltestruktur auf 52 cm über den Boden angehoben und abgesetzt. Soweit die Daten bisher ausgewertet werden konnten, ging alles wie geplant vor sich und HP3 ist unversehrt und völlig funktional. Großen Dank an das JPL Team und die HP3 Ingenieur- und Steuerungsteams!

Als nächstes wird nun der Greifer losgelassen und verstaut, so dass die Schaufel des Arms benutzt werden kann. Wir werden mit Hilfe der IDC Kamera auf dem Arm den Maulwurf und die Grube untersuchen können und sehen, ob wir unsere Pläne anpassen müssen. Falls nicht, werden wir verfahren, wie geplant: Das heißt, die Grube verfüllen, den Boden belasten und dabei hämmern. Wegen des "4th of July" Feiertages in den USA und den Arbeiten zum Verstauen des Greifers wird es noch mindestens eine Woche dauern, bevor wir weitere Neuigkeiten haben werden.

Logbuch-Eintrag vom 28. Juni 2019
Hier ist ein kurzer Zwischenbericht zur An- und Abhebung der Haltestruktur des Maulwurfs, nachdem bis gestern zwei von drei Schritten erfolgreich durchgeführt worden sind. Glückwunsch an das kombinierte JPL-DLR Team! Der finale und etwas größere Schritt soll am Samstag erfolgen. Die beiden bisherigen Schritte bestanden aus einer Anhebung der Haltestruktur um zunächst 12 cm und dann um weitere 13 cm. Der wesentliche Grund für die vorsichtige Vorgehensweise war, dass nicht ganz ausgeschlossen werden konnte, dass sich der Maulwurf oder das Messkabel in der Haltestruktur verhakt hatten. Wir hätten dann möglicherweise den Maulwurf beim Anhaben herausgezogen oder den Arm durch eine zu hohe Last beschädigen können.
Während des ersten Schritts wurde das Flachbandmesskabel aus dem zylindrischen Gehäuse gezogen, in dem der Maulwurf vor dem Hämmern steckte. Im zweiten Schritt haben wir dann Kabel aus der Kabelbox gezogen, die sich im rückwärtigen Teil der Haltestruktur befindet.
Dabei wurde die Länge des herausgezogenen Kabels mit unserem opto-elektronischen Längenmesser (Tether Length Measurement Devise) gemessen, das wie erwartet funktionierte. Das Messkabel ist nun ein wenig mechanisch gespannt, wahrscheinlich von der Reibung im Längenmesser, aber das ist kein Problem und daher wurde am Mittwochabend ein "Go" für den dritten und finalen Schritt gegeben. Die Rohbilder der beiden Kameras (Instrument Context Camera ICC und Instrument Deployment Camera IDC) zeigen die bisherigen Schritten.
Das erste Anheben hat uns einen Blick auf das Loch ermöglicht, dass der Maulwurf im Sand gegraben hat. Ich – wie andere auch – waren zunächst etwas schockiert von den Ausmaßen dieses „Kraters“. Der Durchmesser entspricht etwa zweimal dem Durchmesser des Maulwurfs. Der Maulwurf selbst hat einen Durchmesser von 27 mm. Die Tiefe des Lochs ist nicht gut zu sehen, aber könnte etwa das 2-2,5-fache des Durchmessers unseres Maulwurfs betragen. Daher muss der Maulwurf den Sand oder "Regolith" beachtlich komprimiert haben. Er hat beim Eindringen nicht nur sein eigenes Volumen verdrängt, sondern etwa die Hälfte des Volumens mehr.

Man erkennt um das Loch einen kleinen Rand, doch dieser entspricht nicht dem Volumen des Kraters. Wir können bislang die Wände des Kraters nicht gut sehen, aber es scheint, als ob der Maulwurf wie ein Kreisel um die eigene Achse präzessiert ist und dabei den Krater erzeugt hat. Diese Schlussfolgerung ist konsistent mit den Messungen unseres Neigungsmessers im Maulwurf vom vergangenen März. Die Dichte des Regoliths ist wahrscheinlich niedrig und die Porosität entsprechend hoch. Dies erklärt voraussichtlich die Werte der Messungen der Schallgeschwindigkeit des Sands, die das Seismometer erhalten hat, während wir gehämmert haben - erstaunlich niedrige 120 m/s. Die hohe Porosität entspricht auch der thermischen Trägheit von 200 MKS-Einheiten, die unser Team mit dem Radiometer gemessen hat. Nach dem finalen Absetzen werden wir den Krater genauer untersuchen können. Noch kann man nicht endgültig sagen, wie wir dann weiter vorgehen werden, aber die Diskussion neigt sich dazu so zu verfahren, wie ich es in meinem vorherigen Logbuch-Eintrag beschrieben habe. Dazu werden wir zunächst den Krater mit Sand auffüllen müssen. Dann erst können wir auf den Regolith drücken und dem Maulwurf mehr Halt und Reibung auf der Umwandung verpassen.
Logbuch-Eintrag vom 14. Juni 2019
Die Aktivitäten zum Anheben der Haltestruktur haben begonnen. Das animierte GIF unten zeigt, wie der Greifer des robotischen Arms den entsprechenden Haken an der SSA greift. Am 22. Juni soll dann das Anheben beginnen, zunächst um 12 cm, dann auf 25c m am 25. Juni und schließlich soll am 28. Juni die Struktur vollständig weggehoben und etwa 10 cm zum Lander hin verschoben und abgesetzt werden.
Logbuch-Eintrag vom 06. Juni 2019
DLR und NASA haben gestern eine Pressemitteilung herausgegeben, in der der Plan, die Haltestruktur (support structure SSA) vom Maulwurf (Mole) hoch- und abzunehmen angekündigt wird. Wir waren gebeten worden, mit dem Blog zu warten, bis diese Mitteilung koordiniert war. Daher erst heute ein neuer Eintrag.
In meinem letzten Blog Anfang Mai hatte ich die Pläne für ein zweites diagnostisches Hämmern geschildert. Dieses fand dann wenige Tage später statt. Die Ergebnisse haben uns aber aus meiner Sicht nur bedingt weiter gebracht. Die SSA bewegte sich, das heißt, der Maulwurf ist beim Hämmern an die Haltestruktur gestoßen. Das Messkabel im Fenster in der Haltestruktur (s. Abbildung) bewegte sich, aber nicht deutlich nach unten, wie gehofft. Dennoch war das Hämmern nicht umsonst, denn die erfolgreiche Beobachtung des Kabels durch das Fenster war eines der Hauptziele, das auch erreicht wurde. Die Aufnahme benötigte vor allem die "richtige" Beleuchtungsbedingung am Abend und einige Nachbearbeitung. Sicher hatten wir auch keinen Anlass zu großer Hoffnung, dass sich an der Situation des Maulwurfs etwas geändert haben würde, denn wir hatten ja über die Verbesserung der Diagnose hinaus nicht wirklich etwas unternehmen können.
Es war daher klar, dass wir eine Weiterentwicklung der Strategie brauchten. Eine nochmalige Überprüfung der Situation ergab, dass wir nach wie vor drei Hypothesen zu betrachten haben:
- Der Maulwurf oder das Kabel könnten sich in der Haltestruktur verhakt haben.
- Ein Stein in 30 bis 35 Zentimeter Tiefe könnte den weiteren Weg versperren.
- Die Reibung auf der Außenwand des Maulwurfs reicht nicht aus, um den Rückschlag des Hammermechanismus aufzufangen.
Daher, so die Hypothese, hüpft der Maulwurf auf der Stelle statt weiter einzudringen. (Solange der Maulwurf noch in der Haltestruktur war, hatten Federn die nötige Reibung erbracht.) Leider kann keine der Hypothesen vollständig ausgeschlossen werden. Aber die ersten beiden Möglichkeiten haben eher geringe Wahrscheinlichkeiten. Ein Verhaken ist möglich, setzt aber eher unwahrscheinliche Bewegungen des Maulwurfs beim Hämmern voraus. Aus der Statistik der Steine an der Oberfläche, und der Annahme, dass diese auch einigermaßen repräsentativ für den Untergrund ist, ergibt sich eine Wahrscheinlichkeit von wenigen Prozent dafür, dass der Maulwurf tatsächlich auf einen genügend großen Stein getroffen ist. Die dritte Hypothese ist daher die wahrscheinlichere und hat den unbestreitbaren Vorteil, dass man mit einiger Aussicht auf Erfolg etwas dagegen tun könnte. Die Lösung wäre mit dem Arm an geeigneter Stelle auf den Boden zu drücken, um den Druck und damit die Reibung auf den Maulwurf zu erhöhen. Wir hatten dies schon seit einiger Zeit postuliert. Schließlich haben Rechnungen, die in den letzten Wochen durchgeführt wurden, dann im Team den Ausschlag gegeben, es damit zu versuchen. Mit Hilfe der unten stehenden Bilder möchte ich die Überlegungen erläutern:
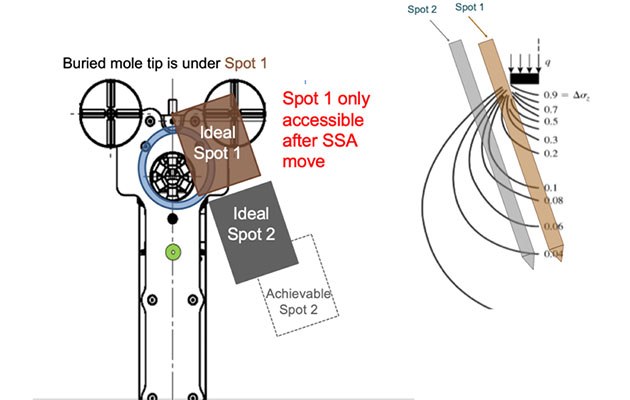
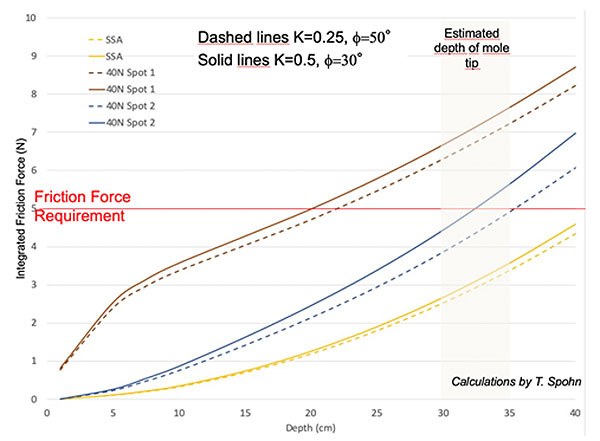
Zunächst zeige ich links einen Grundriss der vorderen Hälfte der Haltestruktur; oben sind die beiden Füßen zu sehen und mittig darunter der Maulwurf mit dem etwa gleichen Durchmesser. Rechts daneben sieht man zwei Rechtecke, die zeigen, wo man – so möglich - mit der Schaufel des robotischen Arms einigermaßen effektiv drücken könnte. Spot 2 würde es erlauben, die Haltestruktur stehen zu lassen. Allerdings kommt der Arm dort nicht gut hin (sondern nur zum „achievable spot 2). Darüber hinaus zeigt ein Vergleich mit der Abbildung rechts daneben, dass der Maulwurf für Spot 2 nicht ideal in der „Druckblase“ unter der Last liegen würde. Auf der Wand des Maulwurfs würden nicht mehr als 10 Prozent der Last anliegen. Beim Drücken auf Spot 1 können wir dagegen mehr als die Hälfte der maximalen Spannung nutzen.
In der folgenden Abbildung zeige ich die Ergebnisse in etwas anderer Darstellung. Aufgetragen in der Grafik ist die Reibung auf der Hülle aufsummiert über der Tiefe im Boden. Darüber hinaus ist der Bereich der Tiefe dargestellt, in der sich die Spitze wahrscheinlich befindet und eine konservative Abschätzung der gesamten Reibungskraft auf der Hülle, die benötigt wird (5N). Die Rechnungen sind für Lasten (ca. 4kPa) auf Spot 1 (braun) und 2 (blau) und für den Fall ohne zusätzliche Last (gelb). Man erkennt, dass für Spot 1 ab einer Tiefe von 20 Zentimetern die nötige Reibung aufgebracht würde, während für eine gleiche Last auf Spot 2 der Maulwurf tiefer als 30 Zentimeter im Boden sein müsste. Diese Rechnungen zeigen aber auch, dass man dem Maulwurf wahrscheinlich nur ein wenig weiterhelfen muss, denn ab 40 Zentimeter Tiefe reicht der Bodendruck alleine aus. Die Ergebnisse hängen von den rheologischen Eigenschaften des Bodens ab, aber der Einfluss der Nähe zum Maulwurf ist größer.
Sobald wir die Struktur anheben, ergibt sich zusätzlich die Chance, die Situation des Maulwurfs genauer in Augenschein zu nehmen und die Strategie gegebenenfalls zu modifizieren. Ingenieure am JPL haben das Anheben nun mehrfach geübt. Ein kurzes Video mit Troy Hudson vom JPL hat NASA auf Youtube veröffentlicht. Eine Aufnahme der Schaufel im Labor sehen Sie hier:

Das Anheben der Haltestruktur geschieht nicht ohne Risiko. Sollten der Maulwurf oder das Messkabel mit der Struktur verhakt sein, könnte der Maulwurf aus dem Boden herausgezogen werden, was wir nicht wollen. Deshalb wird das Anheben langsam und in mehreren Schritten erfolgen. Dies und die weiterhin begleitenden Tests werden sich jedenfalls bis Mitte des nächsten Monats hinziehen, wahrscheinlich auch noch etwas länger.
Drücken Sie uns die Daumen!
Logbuch-Eintrag vom 06. Mai 2019
Es ist etwa ein Monat seit meinem letzten Logbucheintrag vergangen und es ist an der Zeit zu berichten, wie sich die Dinge seither entwickelt haben: Die Auswertung der seismischen Daten hat sich auf einen Wert von 70-80 msec für das Zeitintervall zwischen dem ersten Hammerschlag und dem ersten Nachschlag eingependelt, wie bereits berichtet. Dieser Wert liegt zwischen den Extremwerten für einen frei hüpfenden Maulwurf (50msec) und einen normal hämmernden Maulwurf (100msec). Unsere Folgerung ist, dass der Maulwurf eine gewisse Hüllenreibung aufweist, aber nicht genug, um wesentliche Fortschritte erzielen zu können. Temperaturmessungen mit dem TEM-A-Sensorpaket am Maulwurf zeigen, dass der thermische Widerstand abgenommen hat, was auf einen verbesserten Kontakt zwischen Maulwurf und Regolith hindeutet. Wie das geschehen konnte, ist nicht ganz klar, aber es könnte sein, dass sich der Regolith bis zu einem gewissen Grad gesetzt hat, was den thermischen Kontakt und die Reibung verbessert haben könnte.
Unsere Kameraexperten konnten eine Position für den Kameraarm und geeignete Lichtverhältnisse herausarbeiten, um das Temperaturmesskabel durch eine Art Fenster im "Schornstein" der Trägerstruktur klar darzustellen (siehe unten). Der "Schornstein" ist die Röhre an der Haltestruktur, in der der Maulwurf untergebracht war, bevor er sich in den Marsboden zu hämmern begann; das vom Maulwurf gezogene Temperaturmesskabel läuft durch diesen Schornstein.
Interessant für uns ist, dass das Kabel oben nach hinten gekrümmt zu sein scheint. Diese Beobachtung haben wir mit dem Flugersatzmodell im Labor nachgestellt und damit bestätigt, dass der Maulwurf wohl 30 cm tief im Boden ist. Der Vergleich mit früheren, aber weniger gut beleuchteten Bildern deutet sogar darauf hin, dass sich der Maulwurf während des diagnostischen Hämmers leicht bewegt hat! Wir gehen davon aus, dass die Beobachtung des Kabels durch das Fenster wahrscheinlich die direkteste Beobachtung einer Vorwärtsbewegung des Maulwurfs ist. Das Team hat sich daher entschlossen, am späten Nachmittagen, wenn die Lichtverhältnisse am günstigsten sind, zwei weitere Runden diagnostisches Hämmern durchzuführen und eine Filmaufnahme der Tragkonstruktion und des Fensters zu machen. Zwei Runden statt einer längeren Hammerrunde aus Sicherheitsgründen. Die Aufteilung des Hämmerns auf diese Weise ermöglicht eine Überprüfung, die die Raumfahrtingenieure einen "ground-in-the-loop" nennen, um zu sichern, dass nichts Unerwartetes passiert ist. Leider gab es Verzögerungen bei der Umsetzung, zum einen wegen eines Problems mit einem Temperatursensor und zum anderen wegen eines Problems mit dem Arm. Beide nicht sehr ernsthaft und mit den strengen Sicherheitsvorschriften zusammenhängend. Aber wir sollten in der Lage sein, die erste Runde dessen, was wir diagnostisches Hämmern #3 nennen (#2 wurde zwar kommandiert, aber wegen der Probleme mit dem Temperatursensor nicht ausgeführt), morgen durchzuführen. Wir sind gespannt, ob wir Bewegungen des Kabels sehen werden oder nicht.
Parallel zu den Vorbereitungen für das diagnostische Hämmern führen wir Tests im Labor durch (wobei sich wieder zeigte, dass der Maulwurf sich gut durch verschiedene Sand- und Kiesgemenge arbeiten kann - zumindest unter Erdanziehungskraft) und Tests am Landegerät bei JPL und Modellrechnungen am DLR, die mögliche Aktionen mit dem Arm und der Trägerstruktur auf dem Mars modellieren, um entweder die verfestigte Kruste zu durchbrechen oder die vertikale Spannung und Reibung an der Maulwurfshülle zu erhöhen. Abhängig vom Ergebnis des diagnostischen Hämmerns könnte unsere nächste Aktion darin bestehen, mit dem Arm die Tragkonstruktion in der Nähe des Vorderfußes (die im Bild oben zu sehen ist) oder des Bodens direkt neben der Tragkonstruktion in der Nähe der Haltevorrichtung zu belasten. Diese Punkte befinden sich in der größten Nähe des Maulwurfs, die ohne Abziehen der Haltstruktur erreicht werden können. Diese wegzuziehen könnte gegebenenfalls aber notwendig werden.
Ansonsten funktioniert HP3 völlig nominell.
Bleiben Sie dran.
Logbuch-Eintrag vom 11. April 2019
Es ist an der Zeit, über die Fortschritte zu berichten, die seit meinem letzten Eintrag am 22. März erreicht wurden: Nachdem das diagnostische Hämmern genehmigt wurde, konnte es am 25. kommandiert und am 26. auf dem Mars ausgeführt werden. Erste Ergebnisse erreichten uns am 27. März. Die seismischen Daten kamen jedoch erst am Ende der Woche auf der Erde an. Die erste Diskussion der Ergebnisse fand dann am 1. April statt. Weltraum-Mission brauchen eben ihre Zeit! Wie ich bereits in früheren Einträgen beschrieben habe, hängt der Fortschritt von den Möglichkeiten ab, Kommandos von der Erde loszuschicken (3 Mal pro Woche), von Flybys der Kommunikationsorbitern am Mars und von Daten-Downlink-Pipelines. Übrigens, unsere Diskussionen und Meetings laufen nun per Web-Kommunikation und finden - jetzt, da die europäischen Teams alle wieder zu Hause sind - mehrmals pro Woche statt: Früh am Morgen in Kalifornien, spät am Nachmittag in Mitteleuropa.

Das diagnostische Hämmern war erfolgreich. Das bewegte GIF das der Kollege M. Wiedemann aus Bildern der IDC erstellt hat (copyright NASA/JPL) zeigt, wie sich die Stützstruktur beim Hämmern des Maulwurfs nach vorne neigt. Die Vorwärtsneigung könnte das Resultat davon sein, dass der Maulwurf irgendwie an der Stützstruktur gezogen hat oder aber, dass die Stützstruktur durch den Maulwurf geschüttelt wurde und dadurch um etwa einen halben Zentimeter "heruntergefallen" ist. Die seismischen Daten werden noch ausgewertet um die Zeitdifferenz zwischen dem Hauptschlag des Hammers und dem stärksten Nebenschlag zu bestimmen. Wir hatten die Zeitdifferenz zwischen den beiden großen Hammerschlägen alternativ und je nach Situation des Maulwurfs bei 50 oder 100 Millisekunden vermutet. Nun aber scheint der Messwert irgendwo zwischen den beiden Werten zu liegen, wahrscheinlich irgendwo bei 70-80 Millisekunden. Was das für die Maulwurfsbewegung bedeutet, muss nun von unseren Ingenieuren bewertet werden!
Die Diskussion über die Gründe, warum der Maulwurf nicht weiter eindringt, hat sich auf drei Hypothesen unterschiedlicher Eintrittswahrscheinlichkeit festgelegt:
1. Der Maulwurf oder das Flachbandkabel, das der Maulwurf hinter sich herzieht, ist in der Stützstruktur hängen geblieben. Obwohl diese Hypothese glaubwürdig ist, fehlt hier bisher ein klarer Mechanismus, wie dies geschehen sein könnte. Tests am DLR-Institut für Raumfahrtsysteme haben gezeigt, dass sich das Kabel durchaus verfangen kann, aber nur unter ganz besonderen Umständen. Dennoch wurde an diesem Wochenende ein funktionierendes Modell der Hardware an JPL ausgeliefert, damit die dortigen Ingenieure diese Möglichkeit ebenfalls prüfen können (übrigens: Es dauert 2 ganze Wochen, bis der Zoll hier für eine solche Lieferung abgefertigt ist. Hinzu kommt noch etwas Zeit für die Zollabfertigung in den USA)
2. Der Maulwurf ist auf einen großen Stein in 30 cm Tiefe gestoßen. Die Größe des Steins müsste 10 cm oder größer sein, damit der Maulwurf ihn nicht beiseite schieben oder umgehen kann. Diese Erklärung ist so naheliegend, dass jeder bereit wäre, sie zu glauben. Die Wahrscheinlichkeit, dass ein solcher Stein unserem Maulwurf den Weg versperrt, liegt jedoch nur bei wenigen Prozent, wenn man die (oberirdische) Gesteinsfrequenzverteilung für den Landeplatz von InSight auf dem Mars zu Rate zieht.
3. Der Maulwurf hat möglicherweise nicht genügend Reibung am Rumpf, um den Rückstoß auszugleichen (wie zum Teil in meinen früheren Beiträgen (z.B. vom 21. März) erklärt). Das ist, wie einen Nagel in eine Wand zu schlagen. Wir benötigen die Wand, um genügend Reibung zum Nagel zur Verfügung zu stellen, damit er sich vorwärts bewegt und nicht einfach zurückprallt, während wir mit dem Hammer draufhauen. In ähnlicher Weise gilt dies auch für den Maulwurf. Obwohl die Massen der Mechanismen im Inneren und der Federn so bemessen sind, dass der größte Teil der Energie nach vorne gerichtet ist, ergibt sich eine Rückschlagkraft von etwa 7 Newton, die noch durch die Rumpfreibung aus dem Sand um den Maulwurf herum ausgeglichen werden muss. Dies wäre kein schwerwiegendes Problem, wenn der Sand beispielsweise wie Quarzsand wäre, der keine oder nur geringe Kohäsion aufweist. Ein Beispiel aus unserem Alltag gefällig? Nun, betrachten wir Zucker im Vergleich zu Mehl. Wenn wir einen Finger in Zucker stecken und ihn zurückziehen, verschwindet das Loch, da der Zucker wieder in das von uns geschaffene Loch zurückfließt. Machen wir das gleiche mit Mehl, bleibt das Loch jedoch offen. Zucker ist ohne Kohäsion, während Mehl Kohäsion hat. Geologen haben bei anderen Missionen auf dem Mars gesehen, dass der Marssand kohäsionslos ist und deshalb sollte das vom Maulwurf gehämmerte Bohrloch einstürzen und Druck und Reibung auf die Hülle des Maulwurfs ausüben. Aber die Geologen haben auch gesehen, dass die obersten Zentimeter auf dem Mars durch eine sogenannte "Duricrust" gebildet werden. Hier haben Salze die Sandkörnern verbacken, so dass sie zusammenkleben und den Zusammenhalt in dieser Schicht gewährleisten. Die Duricrust ist in der Regel dünn und kein weiteres Problem. Aber am Landeplatz von InSight scheint sie etwa 20 Zentimeter dick zu sein! Wenn der Maulwurf in der Duricrust sitzt, kann sein Rumpf sehr wohl Reibung verloren haben, und durch weiteres Hämmern kann der Maulwurf das Loch in der Duricust vergrößert haben, wie es die Daten unseres Beschleunigungssensors und unsere thermischen Daten vermuten lassen. Man kann dagegen halten, dass die Duricrust kollabieren sollte, wenn der Maulwurf sie durchschlägt. Zugegeben, jedoch würde selbst ein Loch, das den Durchmesser mehrere Maulwürfe hätte und mit Duricrust-Material gefüllt wäre, noch immer nicht genügend Druck und damit Reibung am Rumpf des Maulwurfs erzeugen. An dieser Stelle sei gesagt, dass die Verhältniss auf dem Mars das Problem noch verschärft. Da die Schwerkraft nur etwa ein Drittel der der Erde beträgt, hilft das Gewicht des Maulwurfs weniger den Rückschlag aufzufangen. Und der niedrige Atmosphärendruck von nur 0,6% der Erde verschärft das Problem weiter.
Im Moment klingt Hypothese #3 am plausibelsten, nicht zuletzt, da wir ein solches Verhalten in Tests auf der Erde in kohäsivem Sand und bei niedrigem Atmosphärendruck gesehen haben. Aber wir haben uns noch nicht auf diese Erklärung festgelegt. Auf jeden Fall würde, falls sich Hypothese #3 als die beste Erklärung herausstellt, sich ein Lösungsweg ergeben. Wir müssten "lediglich" dem Maulwurf helfen, den Rückstoß auszugleichen. Mit dem robotischen Arm könnte das gelingen, aber das muss von unseren Ingenieuren weiter geprüft werden.
Ansonsten ist der Maulwurf völlig gesund.
Bleiben Sie dran.
Logbuch-Eintrag vom 22. März 2019
Das "Anomaly Response Team" hat heute den Weg freigegeben, für das kurze diagnostische Hämmern, das ich in meinem letzten Blogeintrag beschrieben hatte. Während des Hämmerns wird die Kamera auf dem robotischen Arm zirka 40 Bilder aufnehmen, um zu sehen, ob die Haltestruktur vom Maulwurf bewegt wird.
Der Ablauf sieht nun folgendermaßen aus: Heute wird eine TEM-A Wärmeleitfähigkeitsmessung kommandiert, die dann für 24 Stunden am Wochenende auf dem Mars ausgeführt wird. Am Montag wird das Hämmern kommandiert, das dann am Nachmittag des folgenden Sols auf dem Mars ausgeführt wird. Die Daten werden für Mittwoch, den 27. März erwartet. Dann beginnt erst einmal die Auswertung.
Glück auf für den Maulwurf und drückt uns die Daumen!
Logbuch-Eintrag vom 21. März 2019
Das InSight-Team nimmt diese Woche an der Lunar and Planetary Science Conference in Houston, Texas, teil und präsentiert dort die ersten Ergebnisse der Mission der wissenschaftlichen Community. Bruce Banerdt, wissenschaftlicher Leiter der Mission, englisch Principal Investigator (PI) erklärte, ein Grund für das langsame Fortschreiten der Mission liege in der stochastischen (zufallsgesteuerten) Natur der Ereignisse, die InSight beobachten will. So wurde bisher noch kein Mars-Beben registriert, was allerdings nicht beunruhigen müsse, sondern sich mit den Prognosen zur geringeren seismischen Aktivität des Mars im Vergleich zur Erde decke.
Auch die HP3 Wissenschaftler haben es – so kann man es etwas überspitzt sagen – gegenwärtig mit der Folge zufällig verteilter "stochastischer" Ereignisse zu tun. So ist die Lage von Steinen im Untergrund im "Homestead Hollow" mehr oder weniger zufällig, kaum vorhersagbar. Sie sind ja als Folge von Meteoriteneinschläge dorthin verbracht worden.
Noch diese Woche werden wir ein drittes Meeting des sogenannten "Anomaly Review Teams" haben und die Genehmigung für ein kurzes Hämmern von 10 bis 15 Minuten Länge beantragen. Dieses Hämmern soll uns bessere Kenntnis über die Situation geben, in der der Maulwurf sich zur Zeit befindet. Wir wollen nur vergleichsweise kurz hämmern, da die Gesamtzahl der Hammerschläge durch die Lebensdauer des Mechanismus limitiert ist. Wir wissen nicht genau, wie viele Schläge wir insgesamt zur Verfügung haben. Klar ist nur, dass das System irgendwann abgenutzt sein wird und wir mit dem Hämmern daher "haushalten" müssen.
Zur Durchführung des Experiments wollen wir einen speziellen Filter auf dem Kurzperiodischen-Seismometer einsetzen. Er ermöglicht es, die Ankunftszeiten der Signale, die durch die Hammerschläge erzeugt werden, wesentlich genauer zu bestimmen. Warum ist besser zu verstehen, wenn man sich die Funktionsweise des Maulwurfs etwas genauer betrachtet:
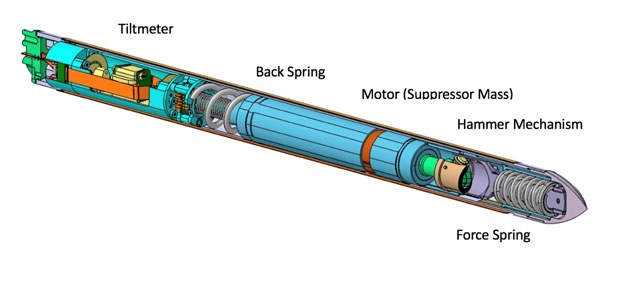
Im Maulwurf zieht vor dem ersten Hammerschlag der Motor (blau) den Hammer (violett) zurück und spannt dabei die Kraftfeder solange, bis ein Mechanismus den Hammerschlag auslöst. Dabei beschleunigt die vordere Kraftfeder (Force Spring) den Hammer zur Spitze hin. Als Reaktion auf die Vorwärtsbewegung des Hammers (actio = reactio) bewegt sich der Motor rückwärts und spannt dabei die hintere Feder. Sobald sich diese entspannt, beschleunigt sie den Motor wieder nach vorne. Dieser trifft auf eine Sperre am Gehäuse, was zu einem zweiten, weniger heftigen Schlag führt. Währenddessen wird der Hammer zurückgeworfen und spannt dabei die vordere Feder aufs Neue. Sobald diese sich entspannt, wird ein dritter, nochmals kleinerer Schlag ausgelöst.
Wir konnten zeigen, dass das Kurzperiodische-Seismometer neben dem Hauptschlag auch mindestens den zweiten, kleineren Schlag erfassen kann. Außerdem wissen wir, dass die Zeit zwischen den beiden Schlägen ein Indikator für die Bewegung des Maulwurfs ist. Wenn er sich zum Beispiel langsam vorwärtsbewegt, beträgt die Zeitdifferenz etwa 100 Millisekunden. Wenn er beim Schlag aber gegen ein Hindernis stößt und von diesem zurückspringt, beträgt diese Differenz nur 50 Millisekunden. Mit einem speziellen Filter, der auf die Daten direkt an Bord des SEIS-Instruments angewendet wird, erhalten wir eine wesentlich bessere zeitliche Auflösung der Signale und sollten in der Lage sein, zu einer fundierten Einschätzung zu kommen, ob der Maulwurf festsitzt, sich langsam vorwärts bewegt oder zurückspringt. Die Erkenntnisse werden uns helfen, unsere weitere Strategie zu entwickeln.
Zusätzlich zum Kurzperiodischen-Seismometer "lauscht" das Breitband-Seismometer den Hammerschlägen, jedoch ausgestattet mit einem weiteren Filter, der speziell entwickelt wurde, um eine Übersteuerung der hochempfindlichen Sensoren beim Hämmern zu verhindern. Wir hoffen, dass wir mit Hilfe dieser Daten eine seismische Geschwindigkeitsschichtung des Untergrundes ableiten und herausfinden können, ob es Hinweise auf eine harte Bodenschicht in einer Tiefe von etwa 30 Zentimetern gibt.
Als drittes Diagnosewerkzeug werden wir die IDC-Kamera am Arm verwenden, um ein Video von der Trägerstruktur zu erstellen, während der Maulwurf hämmert. Da die Kamera aber nur etwa jeden vierten Schlag aufnehmen kann, ist dies nicht ganz einfach. Wir hoffen dennoch, dass wir erkennen können, ob sich die Trägerstruktur bewegt oder nicht. Eine Alternative zur "echten Bewegtbildaufnahme" wäre eine Langzeitbelichtung, um eine mögliche Bewegung der Konstruktion aus einem Foto ableiten zu können.
Wenn das Vorhaben nach einer sorgfältigen Überprüfung durch das Anomaly Review Team genehmigt wird, sollten wir mit dem Experiment nächste Woche beginnen können. Das Review Team besteht aus Verantwortlichen für die Mission und für das Instrument. Es wird jedoch einige Zeit dauern, bis die seismischen Daten vollständig heruntergeladen sind und wissenschaftlich interpretiert werden können.
Parallel zu diesen Aktivitäten auf dem Mars haben Versuche im Labor begonnen, die die Situation auf dem Mars nachstellen und Strategien testen wollen, wie aus der Blockade herauszukommen wäre. Die Versuche beim DLR in Bremen und in Berlin werden dabei von Versuchen beim JPL in Pasadena begleitet. Dort befindet sich ein Modell des Landers und seines robotischen Arms, das voll funktionsfähig ist. Das DLR wird dazu eine der verfügbaren Kopien der Hardware nach Pasadena schicken.
Logbuch-Eintrag vom 12. März 2019
Phobos-Finsternis: Diese Woche hat das Radiometer dreimal den Vorbeiflug des Mars-Mondes Phobos vor der Sonne registriert. Die Finsternisse waren in den Daten des Radiometers deutlich zu erkennen. Bei jeder der rund 30 Sekunden langen Finsternisse war ein Temperaturabfall von etwa 1° C zu beobachten. Auch die Kameras von InSight haben die kurze Tageslichtabsenkung registriert, wie in dem animierten Gif unten zu sehen ist (und in diesem Tweet von InSight). Die Radiometerdaten werden nun im Hinblick auf die thermophysikalischen Eigenschaften der obersten Schichten des Marsbodens interpretiert. Die Auswertungen der Ergebnisse werden frühestens zur „Lunar and Planetary Science Conference“ (vom 18. bis 22. März) vorliegen.
Falls Sie das Wetter auf dem Mars mitverfolgen, entweder über den Mars-Wetterdienst oder über den virtuellen Kontrollraum des DLR haben Sie sich vielleicht gefragt, warum die gemeldeten Tagestemperaturen so signifikante Unterschiede aufweisen. Während der Wetterdienst eine maximale Tagestemperatur von -13 bis -15° C gemeldet hat, gehen die Tagestemperaturen auf dem MUSC-Server bis zu +15° C hoch. Der Grund dafür ist, dass der Wetterdienst die Lufttemperatur angibt, wohingegen in unserem virtuellen Kontrollraum die sogenannte Helligkeitstemperatur der Oberfläche erfasst wird. Diese wird mit dem HP3-Radiometer gemessen. Die letztgenannte Temperatur bezeichnet den Wert, bei dem die Marsoberfläche Wärme abgibt, während die Lufttemperatur an einem Mast am InSight-Lander in einer Höhe von gut einem Meter über der Mars-Oberfläche gemessen wird. Konkret heißt das, dass die Oberfläche des Mars in der Regel um gut 20 bis 30 Grad wärmer ist als die Luft darüber.
Was den #MarsMaulwurf anbelangt, so war es eine arbeitsreiche Woche mit einigen Besprechungen und reichlich Brainstorming. Das Seismometer hat die hämmernden Schläge aufgezeichnet, diese können uns nun als Diagnosewerkzeug dienen (außerdem sind die Daten von großem wissenschaftlichem Interesse für die Seismologen und Geologen). So besteht ein hämmernder Schlag eigentlich aus zwei Schlägen.Einem Hauptschlag und einem kleineren Stoß, die mit einem Abstand von jeweils etwa einer zehntel Sekunde erfolgen. Der zeitliche Abstand zwischen diesen Schlägen hängt von der Geschwindigkeit ab, mit der sich der Maulwurf in die Tiefe gräbt. Im Prinzip kann man sagen: Je kürzer der Abstand, desto schneller bewegt sich der Maulwurf vorwärts. Wenn der Maulwurf dagegen nicht in die Tiefe dringt, sondern an Ort und Stelle "springt", kann die Differenz auch gegenüber dem Wert für die normale, langsame Penetration reduziert werden. Es gibt Hinweise darauf, dass die beiden kleineren Stöße mit dem Kurzzeit-Seismometer erfasst wurden. Diese werden nun untersucht. Es wurde auch eine Wärmeleitfähigkeitsmessung durchgeführt – die Daten stehen zum Herunterladen und Auswerten bereit.
Diese Woche werden wir hier im JPL eine Besprechung in einem größeren Team abhalten, um zu sehen, wo wir nun mit den gesammelten Auswertungen stehen. Die beiden prominentesten Hypothesen sind:
1. Der Maulwurf ist auf ein Hindernis (Gestein) gestoßen und schlägt auf der Stelle. In diesem Fall wäre es wahrscheinlich, dass er das Bohrloch, das er gegraben hat, erweitert hat.
2. Die Hardware des Maulwurfs hat sich irgendwie in der Trägerstruktur verfangen, weil das Gerät in einem Winkel von etwa 15° zum Ausweichen gezwungen wurde. Höchstwahrscheinlich durch einen flachen Stein, den es aber wohl passieren konnte. Da wir einen indirekten Beweis haben (der sich nun konkretisiert), dass der Maulwurf ungefähr zu etwa drei Viertel seiner Länge außerhalb der Gehäusestruktur und somit im Boden steckt, kann es sein, dass sein hinterer Teil in der Gehäusetsruktur hängen geblieben ist.
Bleiben Sie dran!
Logbuch-Eintrag vom 6. März 2019
Ausgezeichnete Neuigkeiten! Wir haben gerade die Daten der ersten Phobos-Finsternis erhalten: Die Abkühlung durch den Schatten, der innerhalb von etwa 30 Sekunden durch das Sichtfeld des Radiometers ging, ist deutlich sichtbar. Die Temperatur ging um etwa 1 Grad Celsius zurück und ist damit größer als erwartet und zweifellos besser als bei den pessimistischsten Schätzungen (= wir werden es überhaupt nicht sehen können)! Das Team ist glücklich und freut sich über die erste Sonnenfinsternis auf dem Mars, die jemals mit einem Radiometer beobachtet wurde.
Was bedeutet das Ganze nun? Es gibt eine Größe, die Wissenschaftler die "thermische Trägheit" nennen. Sie ist abhängig von der Wärmeleitfähigkeit des oberflächennahen Materials, seiner Dichte und seiner Wärmekapazität. Ein kleiner Wert zeigt beispielsweise eine niedrige Wärmeleitfähigkeit oder eine große Porosität (also eine niedrige Dichte) usw. an. Je größer die thermische Trägheit, desto geringer ist der Effekt. Insbesondere wenn sich der Schatten schnell bewegt und die Trägheit groß ist, ist der Effekt gering. Der messbare Effekt ist umso ausgeprägter, je kleiner die Trägheit ist. Das Team wird nun die Daten analysieren und ein Modell der obersten Millimeter des Oberflächenmaterials entwickeln. Ein Teil unserer Untersuchungen bilden also die geophysikalischen Parameter des Mars.

Was den Maulwurf betrifft, so wird das Team eine große Anzahl von Bildern erhalten, die von den Kameras auf dem InSight-Lander und dem Arm aufgenommen werden. Einige der Bilder, die wir bereits haben, zeigen, dass ein Teil des Maulwurfs tatsächlich sichtbar ist. Daraus schließen wir, dass der Maulwurf etwa 30 Zentimeter im Regolith und wahrscheinlich noch 7 Zentimeter im Rohr der Trägerstruktur steckt. Er zeigt etwa 15 Grad von der Vertikalen weg und hat entweder eine Drehung oder eine Veränderung seiner Drehachse erfahren.
Er ist immer noch gesund und munter, aber natürlich ist seine Lebensdauer begrenzt - in Bezug auf die Hammerschläge, die er durchführen kann, bevor er abgenutzt wird. Allerdings befürchten wir nicht, dass der Maulwurf so schnell kaputt geht. Dennoch will das Team auf Nummer sicher gehen und alle Informationen, die verfügbar sind, sammeln, einschließlich seismischer Daten, um zu sehen, wie wir dem Maulwurf helfen können, das Hindernis zu überwinden (oder durch eine mögliche Schotterschicht zu kommen). Sobald wir alle Daten haben, werden wir entscheiden, wie wir am besten vorgehen.
Dranbleiben!
Logbuch-Eintrag vom 5. März 2019
Der MarsMauwurf erfreut sich nach wie vor bester Gesundheit. Beim Hämmern am Wochenende hat er sich weiter gegen einen bestehenden Widerstand gearbeitet, ohne deutlich an Tiefe zu gewinnen. Das Team hat deshalb beschlossen, das Hämmern für etwa zwei Wochen auszusetzen, die Situation genauer zu analysieren und gemeinsam Strategien zu entwickeln, wie sich das Hindernis überwinden lassen könnte.
Zwischenzeitlich planen wir, die erste Wärmeleitfähigkeitsmessung des Mars-Erdreichs, des sogenannten Regoliths, durchzuführen sowie mit dem Radiometer den Schatten des Marsmonds Phobos zu beobachten, der am 5., 6. und 8. März 2019 durch das Gesichtsfeld des Geräts wandern wird. Nach wie vor ist viel zu tun, um gute wissenschaftliche Ergebnisse von HP3 und InSight zu erhalten. Raumfahrt - wahrlich nicht einfach!
Logbuch-Eintrag vom 3. März 2019
Kölle Alaaf (oder Düsseldorf Helau und Meenz Helau)! Einige von uns im Team aus den rheinischen Karnevalshochburgen wären gerade eigentlich mit Feiern beschäftigt. Aber ein Instrument auf dem Mars zu steuern ist doch noch spannender!
Die Daten, die wir analysiert haben, erzählen die folgende Geschichte über den ersten Hammertag: Es ist bestätigt, dass der Maulwurf mindestens 18 Zentimeter aus seinem Führungsrohr draußen ist und sich nicht tiefer als 50 Zentimeter in den Boden gegraben hat (das wäre die Tiefe, in der unser Tiefenmessgerät mit der Aufzeichnung begonnen hätte und in der der erste Temperatursensor am Seil im Marsboden wäre).
Die Daten zeigen, dass er die ersten 18 Zentimeter in etwa 5 Minuten geschafft hat und sie zeigen auch, dass der Maulwurf in dieser Zeit um etwa 15 Grad von der Vertikalen weggelenkt wurde. Der Winkel kann um einige Grad größer oder kleiner sein. Das wird die genauere Auswertung der Daten zeigen. Da die Verschiebung sehr schnell erfolgte, können wir sagen, dass der Maulwurf auf ein Hindernis in der Nähe der Oberfläche traf und dass er sich entweder weg- oder eher daran vorbeibewegt hat, wobei seine Position etwas geneigt wurde. Die Achse des Maulwurfs hat sich zudem leicht gedreht: Zeigte er zunächst etwas in Richtung des linken Vorderfußes, änderte sich seine Position leicht in Richtung des rechten Vorderfußes und wieder zurück. Man könnte daraus schließen, dass er gegen ein Hindernis arbeitete. Nach etwa 5 Minuten behielt er seine Position weitgehend bei und hämmerte für den Rest der Schlagzeit weiter.
Eine mögliche Interpretation ist, dass er nach den ersten 5 Minuten auf ein anderes Hindernis gestoßen ist, er könnte sich aber auch durch eine Schicht aus Kies oder Geröll eingearbeitet haben. Nach etwa 3,5 Stunden Hämmern arbeitete er sich wieder frei und änderte seine Position etwa 10 Minuten lang leicht. Während der Marsmaulwurf das oder die Hindernisse bearbeitete, hob er vermutlich die Tragkonstruktion etwas an. Sicher ist, dass er sie um circa 2 Zentimeter zurück zum Lander schob, wie in dem animierten GIF unten zu sehen ist.
Also, wo ist unser Marsmaulwurf? Die Team-Mitglieder Sue, Doris und Troy nutzten die beobachtete Neigung des Maulwurfs und die Verschiebung der Stützstruktur, um seine Tiefe zu schätzen. Sie kamen auf einen Wert zwischen 28 und 32 Zentimeter Tiefe. Das stimmt mit der Entwicklung der Motortemperatur nach Sonnenuntergang überein, die sich deutlich weniger schnell abgekühlt hat als die Atmosphäre, was darauf hindeutet, dass der Maulwurf zumindest teilweise vergraben ist (er ist 40 Zentimeter lang).
Und wie geht es dem Team? Wir sind etwas besorgt, schon so schnell auf ein oder zwei Hindernisse gestoßen zu sein, sind aber optimistisch. Dass der Maulwurf die ersten 20 Zentimeter in nur 5 Minuten geschafft hat, deutet auf eine hohe Durchdringungsrate im ungehinderten Zustand hin. Hätte er in dieser Zeit sogar 30 Zentimeter erreicht, dann wäre vielleicht unrealistisch hoch gewesen. Realistischer ist die Annahme, dass der Maulwurf die ersten 20 Zentimeter schnell erreichte und dann langsam für etwa 10 Zentimeter in Kies eindrang oder dass er ein Hindernis beiseite schob. Tests mit Kieselsteinen im Sand haben gezeigt, dass der Maulwurf dazu zwar einige Stunden braucht, er sich aber durch eine Schicht aus Kieselsteinen arbeiten oder einen Stein aus dem Weg räumen kann. Geologische Untersuchungen lassen vermuten, dass der Boden hauptsächlich aus Sand besteht. Daher hoffen wir, am Sonntag die Hindernisse überwunden zu haben und die 70 Zentimeter zu erreichen.
Aber wir sollten nicht vergessen: Wir sind auf dem Weg ins Unbekannte!
Drücken wir die Daumen!
Logbuch-Eintrag vom 1. März 2019
Der Maulwurf hat gestern über 4 Stunden gehämmert und eine Tiefe von mindestens 18 Zentimetern und nicht mehr als 50 Zentimetern erreicht - aber nicht die geplanten 70 Zentimeter. Die Daten deuten darauf hin, dass HP3 diese Tiefe innerhalb von etwa 5 Minuten erreicht hat, dann aber bald auf ein Hindernis gestoßen ist (die genaue Tiefe ist noch nicht bekannt).
HP3 arbeitete für die restliche Zeit gegen dieses Hindernis und kann es nach 3,5 Stunden zur Seite geschoben haben, wie eine leichte Drehung des Maulwurfs zeigt. Die thermischen Sensoren am Maulwurf und am Temperatur-Messkabel zeigen an, dass die erreichte Tiefe nicht mehr als 50 Zentimeter betrug (weil der unterste Temperatursensor eine Temperatur gemessen hat, die für die Lufttemperatur erwartet wurde).
Außerdem kühlten die Temperatursensoren am Maulwurf HP3 mit einer Geschwindigkeit ab, die darauf hindeutet, dass er sich zumindest nicht vollständig im Boden befindet. Das Hindernis führte zu einer Neigung des Maulwurfs um etwa 15 Grad gegenüber der Vertikalen (noch nicht bestätigt), wodurch sich die tragende Konstruktion auf der Oberfläche um circa 2 Zentimeter verschoben hat.
Das Team plant eine weitere vierstündige "Runde Hämmern". Sie soll am Samstag beginnen und die Ergebnisse werden für Sonntag bei uns auf der Erde erwartet.
Logbuch Eintrag vom 27. Februar 2019
Das HP3-Team hat gestern den ersten Zyklus der Hammer- und Wärmeleitfähigkeitsmessung erfolgreich verschoben. Dies wird heute vom JPL/CNES/DLR Operations Team überprüft und morgen per direkter X-Band-Verbindung zum Lander auf dem Mars geschickt. Der Maulwurf sollte kurz nach 10 Uhr morgens mit dem Hämmern beginnen, was etwa 20 Uhr in Pasadena oder 5 Uhr MEZ sein würde. Die Daten werden Freitagmorgen 6:30 PST beziehungsweise 15:30 MEZ heruntergeladen. Wir werden natürlich alle im JPL versammelt sein, trotz unseres laufenden Science Team Meetings in der Huntington Library hier in Pasadena. Nach dem Hämmern, das bis zu 4 Stunden dauert, wird der Maulwurf fast 3 Tage abkühlen, um Wärme abzuführen, die durch die Reibung beim Hämmern im Maulwurf entstanden ist.
Von Sonntag bis Montag wird der Maulwurf die erste Wärmeleitfähigkeitsmessung durchführen, hoffentlich in 70 cm Tiefe. Dazu wird die Außenhülle des Maulwurfs für 24 Stunden konstant erwärmt und der Temperaturanstieg dort als Zeitfunktion gemessen. Mit Daten aus der Kalibrierung in Berlin kann die Wärmeleitfähigkeit aus der Zeitrate der Temperaturänderung bestimmt werden. Dies ist eine wichtige Messung, die wir danach in Abständen von 50 cm Tiefe wiederholen. Wir haben dann ein Wärmeleitfähigkeits-Tiefenprofil des Bodens (eigentlich Regolith genannt). Später, wenn wir den Temperaturgradienten messen, werden wir die Wärmeleitfähigkeit mit dem Temperaturgradienten multiplizieren, um den Wärmefluss zu erhalten, das Hauptziel des Instruments. Die Daten sollten am frühen Dienstag Morgen Pasadena Zeit unten sein.

Zusätzlich zur (soweit ich weiß) ersten Wärmeleitfähigkeitsmessung auf dem Mars am Sonntag wird am frühen Dienstagmorgen ein Phobos-Schatten durch das Sichtfeld unseres Radiometers laufen. Dies gibt uns die Möglichkeit, die thermische Wirkung einer Phobos-Finsternis auf die Oberflächentemperatur mit unserem Radiometer zu messen. Am Mittwoch und Freitag wird es zwei weitere Finsternisse geben. Kleiner Tipp: Wikipedia konsultieren, um mehr über Finsternisse auf dem Mars zu erfahren. Ich füge ein älteres HRSC-Foto des Phobos-Schattens auf dem Mars bei. Die Verdunkelung wird bereits nach 20-30 Sekunden wieder vorbei sein.
Spannende Zeiten!
Weitere Informationen zum Experiment gibt es hier, einem Open-Access-Papier, das das HP3-Instrument und unsere DLR-Websites beschreibt.
Logbuch Eintrag 26. Februar 2019
Leider habe ich schlechte Nachrichten. Gestern ist das gesamte InSight OPS-Team (bestehend aus Mitarbeitern von JPL, DLR und CNES) die Befehlsliste für den Tag erfolgreich durchgegangen - inklusive dem Status von HP3, dem GO für das Hämmern sowie den Hammer-Befehlen. Die Besonderheiten der Mars- und Erdrotation, der Kommunikationsorbiterdurchgänge mit Hoch- und Runterladmöglichkeiten sowie die Arbeitszeiten hier vor Ort führten dazu, dass die Befehle mit dem sogenannten Morning Pass des NASA Odyssey Raumsonde gegen 6 Uhr lokaler Zeit (also etwa Mitternacht in Deutschland) zum Mars geschickt werden sollten. Leider wurde die Uplink-Möglichkeit gestern Abend aus noch unbekannten technischen Gründen verpasst. Das OPS-Team plant nun, am Donnerstag eine Uplink-Möglichkeit per X-Band direkt zum Lander zu nutzen. Das bedeutet allerdings auch, dass das HP3-Team die Hammerzyklen neu planen muss. Weitere zwei Tage Verzögerung...
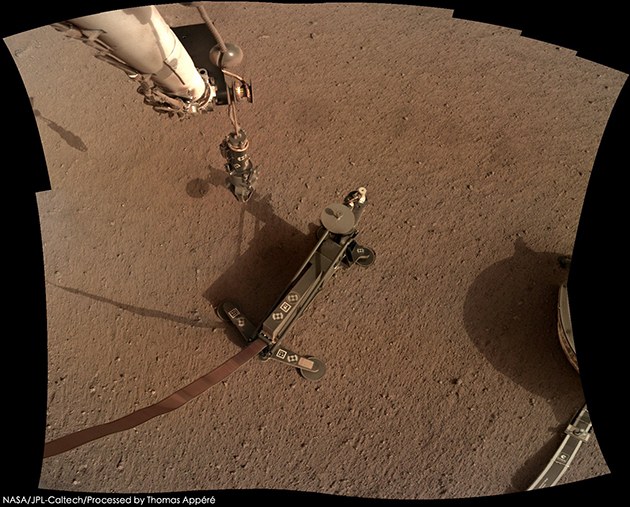
Logbuch Eintrag vom 24. Februar 2019
Heute Morgen habe ich die Bestätigung von unserem Systemingenieur Jörg Knollenberg erhalten, dass die Freilassung unseres Maulwurfs erfolgreich war! Das bedeutet, der Maulwurf ist nicht mehr in seiner Halterung, die ihn zuvor vor allen ungewollten Bewegungen geschützt hat. Er ist nun also einsatzbereit! Morgen, Montag den 25. Februar, wird es eine offizielle Überprüfung durch das Operationsteam geben. Dann wird der Befehl, mit dem der Maulwurf das Hämmern beginnt, in die Liste der Befehle aufgenommen, die morgen Nachmittag an den Lander InSight geschickt werden. Der Hammerbetrieb beginnt dann um 10 Uhr morgens Ortszeit (Lokale Mars Zeit), also am Dienstag kurz vor 19 Uhr Pazifikzeit beziehungsweise kurz vor 2 Uhr Morgens am MIttwoch in Deutschland. Wir erwarten die Bestätigung des erfolgreichen Hämmerns über den TGO (Trace Gas Orbiter der ESA) um 8:45 Uhr PST beziehungsweise 17:45 Uhr MEZ am Mittwoch.
Logbucheintrag vom 22. Februar 2019
Update: Das finale GO für die Freilassung des Maulwurfs wurde soeben gegeben!
Die aktuellen Bilder der InSight-Fisheye-Kamera der Landesonde (ICC) und der Kamera am robotischen Arm von InSight, die sogenannte IDC, zeigen HP3 und SEIS auf der Oberfläche und den robotischen Arm, wie er HP3 inspiziert. Die Kamera am robotischen Arm hat noch mehr Aufnahmen gemacht, die nun vom JPL und unseren DLR Wissenschaftlern untersucht werden für das finale "GO" für die Freilassung des Maulwurfs.
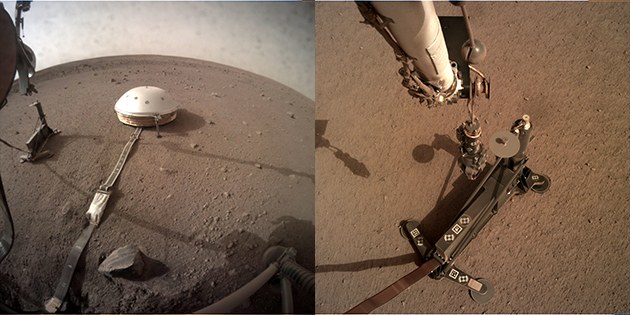
Logbuch-Eintrag vom 21. Februar 2019
Die Spannung steigt, wir beginnen bald mit dem Hämmern! Gestern erhielten wir die Bilder, die das Aussetzen von HP3 bestätigen, woraufhin das gesamte Team (ein Hoch auf unser Team!) den Abschluss der Aussetzungsphase der Mission mit einem Kuchen feierte. Heute wird die Kamera am robotischen Arm von InSight, die sogenannte IDC, den Standort von HP3 unter die Lupe nehmen und das "engineering tether", also das Kabel, was unser Instrument mit InSight verbindet, kontrollieren. Wir erwarten diese Bilder morgen und werden sie sehr gewissenhaft prüfen. Anschließend werden wir das Kommando geben, die Frangibolts, die Befestigung des Maulwurfs am Gehäuse, abzufeuern: Das bedeutet die "Freilassung" des Maulwurfs! Ist das vollbracht, werden wir am Montag mit dem Hämmern beginnen. Die Parameter dazu werden so eingestellt sein, dass der Maulwurf am Dienstag, 26. Februar 2019, um 10 Uhr LMST (lokale Marszeit) beginnt, sich in den Marsboden zu graben. Das wird bis zu 4 Stunden dauern. Mithilfe des ESA Trace Gas Orbiter TGO (danke an die ESA!) werden die entsprechenden Daten an die Erde übertragen, sodass wir diese am Mittwoch um 8:45 PST erhalten. Das ist der Moment, auf den wir alle gewartet haben: nämlich das Erreichen der ersten 70 Zentimeter! Obwohl wir den Maulwurf auf Herz und Nieren getestet haben, bleibt eine gewisse Unsicherheit. Immerhin wurde soetwas noch nie zuvor gemacht - weder auf dem Mars noch auf sonst einem erdähnlichen Planeten. Natürlich haben die Astronauten der Apollo-Mission am Mond bereits 3 Meter in die Tiefe gegraben, aber dabei handelte es sich eben nicht um eine robotische Mission.
Das original Logbuch vom Projektleiter inklusive alter Beiträge gibt's hier (auf englisch).
Über InSight
Mit der NASA-Landesonde InSight startete am 5. Mai 2018 eine Mission, die mit geophysikalischen Messungen direkt auf der Marsoberfläche den inneren Aufbau und den Wärmehaushalt des Planeten erkunden wird. Das DLR hat mit dem Instrument HP3 (Heat Flow and Physical Properties Package) ein Experiment zu dieser Mission beigesteuert. Am 26. November 2018 ist InSight nördlich des Äquators in der Ebene Elysium Planitia auf dem Mars gelandet.
Es ist das erste Mal seit der Astronautenmission Apollo 17 im Jahr 1972, dass Wärmeflussmessungen mit einem Bohrmechanismus auf einem anderen Himmelskörper durchgeführt werden. Hauptziel des Experiments ist es, aus den Messungen des Wärmeflusses unter der Oberfläche den thermischen Zustand des Marsinneren ableiten zu können. Mit Hilfe der Daten können Modelle der Entwicklung des Mars, seiner chemischen Zusammensetzung und auch des inneren Aufbaus überprüft werden. Aus den Messungen auf dem Mars können auch Schlüsse für die frühe Entwicklung der Erde gezogen werden.
Im virtuellen Kontrollraum kann die Tiefe unseres #MarsMaulwurf verfolgt werden!

Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Tags: