
FlappyBot – Faserlegen ohne begrenzende Führungskinematik

{kind=link}
FlappyBot und der neue Freiheitsgrad für die Faserverbundfertigung – Faserlegen ohne begrenzende Führungskinematik
Große, flächige Faserverbundstrukturen werden bislang durch große Portal-anlagen oder Knickarmroboter gefertigt. Ein typischer Anwendungsfall sind die Flügelschalen moderner Verkehrsflugzeuge. Aus vielen Schichten dünner, unidirektionaler Faserhalbzeuge werden die Laminate aufgebaut. Entsprechend der Bauteile sind die Portalanlagen ebenfalls groß und aufwändig. Kompaktere Knickarmroboter verfügen über eine eingeschränkte Reichweite. Aufgrund von Führungsschienen, Reichweite oder Kabeln sind beide Anlagentypen nur eingeschränkt skalierbar. Mobile Robotereinheiten können hier die Lösung sein. FlappyBot ist der weltweit erste Prototyp einer mobilen Faserlegeeinheit, die Fibre-Placement in der Produktion flexibler macht.
Von Rasenmährobotern inspiriert
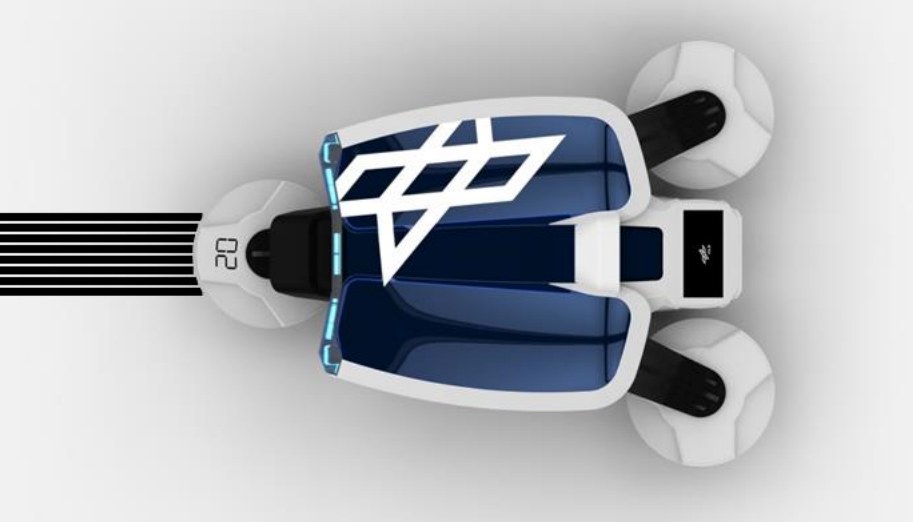
Die begrenzte Reichweite von Knickarmrobotern führte bei der Fertigung einer großen Flügelschale zur der Idee: Mobile Robotereinheiten sollen auf dem Formwerkzeug selbst verfahren und dort die Fasertapes Schicht für Schicht ablegen. Die Einheiten verfahren dort autonom und kooperieren wie ein Schwarm. Voraussetzung ist nur die Information der genauen Ist-Position, des Arbeitsbereichs und des Ladeortes. Form und Größe des Laminates werden damit frei konfigurierbar. So kurios es klingt – der Ansatz eines frei fahrenden Endeffektors innerhalb des Bearbeitungsbereichs ist nicht neu. Rasenmäh- und Staubsaugerroboter sind Beispiele aus dem Alltag. Auf dem Laminat selbst zu verfahren ist jedoch bislang unkonventionell. Die Erklärung liegt in der Beeinflussung der Tapes: Die Räder erzeugen lokalen Druck auf das Laminat, was zu Verschiebungen oder Faserondulation führen kann. Das Gesamtkonzept mobiler Legeeinheiten bietet für einige Anwendungen jedoch die Chance, Fiberplacement wirtschaftlich zu machen. Aufgrund des großen Potentials wurden die zentralen Herausforderungen nochmals eingehend untersucht: die Beeinflussung des Laminates, das Antriebskonzept und die Energieversorgung an Bord. Die Antriebslösung mit der höchsten Maneuvrierbarkeit bei gleichzeitig akzeptablen Flächenpressungswerten sind drei Kugeln, die durch jeweils drei sogenannte „Omniwheels“ angetrieben werden. Jede Kugel ist damit in jede Richtung ansteuerbar. Die Lösung ermöglicht das Wenden auf der Stelle mit möglichst geringer Übergangszeit zwischen zwei abgelegten Bahnen. Mit dem Antrieb ist das Fahren an Steigungen auf schwach gekrümmten Formwerkzeugen wie Flügeloberschalen möglich. Die Flächenpressung verursacht keine unzulässigen Beschädigungen im Laminat. Die Proben wurden mit dem 9-fachen der lokalen Flächenpressung der Anpressrollen aktueller AFP-Einheiten beansprucht. Grundsätzlich ist das Verfahren der Einheiten auf dem Laminat damit zulässig. Die Energieversorgung wird durch Kondensatoren realisiert, die induktiv geladen werden. In der Konfiguration des ersten Prototypen ergibt sich ein konstanter Arbeitstakt von 7 Sekunden Ladezeit für 60 Sekunden Faserlegen. Mit integrierten Ladespulen im Randbereich des Formwerkzeugs stellt der Takt keine Begrenzung der Bauteilgröße dar. Aktuelle Herausforderung ist die hinreichend genaue Referenzierung der Einheiten.
Schwarmverhalten: autonome Roboter kooperieren
Durch den Verzicht auf verstärkte Fundamente, Führungsschienen und Kabel ergeben sich neue Freiheitsgrade für die Technologie. Das Formwerkzeug mit den autonom agierenden Robotereinheiten kann in bestehende Produktionshallen integriert werden. Bedarfsgerecht kann die Anzahl gleichzeitig verfahrender Einheiten gewählt werden. Die Einheiten kooperieren schwarmähnlich und steigern damit die Effizienz. Gleichzeitig schaffen kooperierende Einheiten eine Redundanz, die die Produktion robuster macht. Insbesondere das Produktionsmanagement einer 2D-Ablage von beispielsweise Thermoplast kann schnell und bedarfsgerecht reagieren. Welche Bauteile in welcher Reihenfolge und Menge wird flexibel wie im 3D-Druck. Die kompakten Einheiten lassen sich in Seecontainern transportieren, was eine Mietlösung für die Betriebsdauer ermöglicht. Das insgesamt geringere Investitionsrisiko der Technologie kann Fibreplacement für viele Anwendungen erstmalig wirtschaftlich machen.
Projektlaufzeit: 2014 – 2016
Finanzierungsträger: DLR
Kontakt
Philipp Sämann
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Systemleichtbau, Produktionstechnologie
Stade
Tel.: +49 531 295-3743
Fax: +49 531 295-3702Dominik Delisle
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Systemleichtbau, Produktionstechnologie
Stade
Tel.: +49 531 295-3738
Fax: +49 531 295-3702