Intelligente Räder – sichere Fortbewegung auf unbekanntem Terrain

{kind=link}
Das Fahren unter niedriger Schwerkraft stellt eine besondere Herausforderung an den MMX-Rover. Die Anziehungskraft von Phobos ist etwa tausend Mal geringer als die der Erde. Entsprechend langsam und vorsichtig muss die Fortbewegung ausfallen, um nicht „abzuheben“, denn was auf der Erde als „Wheelie“ sportlich anmutet, ist auf Phobos fatal. Eine weitere Besonderheit ist der weiche Sandboden – durch die geringe Gravitation liegt dieser lockerer als auf der Erde und sorgt so für ein starkes Einsinken der Räder.
Die Forschenden des DLR-Instituts für Systemdynamik und Regelungstechnik standen vor der Herausforderung, Räder für den Rover zu entwickeln, die optimale Zugkraft ermöglichen, gleichzeitig aber extrem leicht und dennoch sehr stabil sind. Bereits bei der Landung wird den Rädern Einiges abverlangt: Beim ersten Testanflug zur Phobos-Oberfläche wird der Rover aus einer Höhe von etwa 50 Metern vom Explorationsmodul abgekoppelt und fällt mit mehrmaligem Abprallen auf die Oberfläche. Bei der Landung müssen die Räder sanft abfedern und sich im anspruchsvollen Gelände beweisen.
Mit Simulation zum intelligenten Rad
Um mit möglichst wenigen Bauteilen möglichst viele technische Funktionen abzudecken, haben die Forschenden modernste Simulations- und Optimierungsmethoden angewendet. So tragen die Elemente des Rades, welche die Zugkraft verbessern, auch dazu bei, dass das Rad die Belastungen bei Start und Landung besser aushält. Dadurch konnte ein stabiles und gleichzeitig nachgiebiges Rad entwickelt werden, das auftretenden Belastungen intelligent ausweicht.
Um die Zugkraft weiter zu verbessern, setzten die Forschenden Berechnungen mit sogenannten Partikelsimulationen ein, die den Sand auf Phobos nachbilden. Gleich zu Beginn stand das Team vor der großen Aufgabe, herauszufinden, ob auf Phobos das Fahren überhaupt möglich ist. Durch komplexe Simulationen konnte diese Frage bejaht werden. Das MMX-Rad wurde so konstruiert, dass es für eine große Bandbreite an Sand-Arten geeignet ist, da vor der Landung wenig Informationen über die Bodenbeschaffenheit bekannt sind. Dafür wurden auch „worst-case“ Böden, also die schwierigst denkbaren Fälle, als virtuelle Sand-Arten erstellt und simuliert.
Video: Modell des MMX-Rovers bei Tests am Prüfstand
Für die Wiedergabe dieses Videos auf Quickchannel.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Dabei spielte die Analyse der unterschiedlichen Fortbewegungs-Szenarien wie beispielsweise Steigungen, Querfahrten, Anfahren und Abbremsen eine wichtige Rolle, da jede Situation eigene Anforderungen erzeugt. Die aufwändigen, komplexen Simulationen konnten innerhalb des engen Zeitplanes mit Hochleistungsrechnen erstellt werden. So gelang es den Forschenden eine innovative Radgeometrie zu finden, welche die Traktion auf Phobos ermöglicht.
MMX-Rad – ein robustes Leichtgewicht
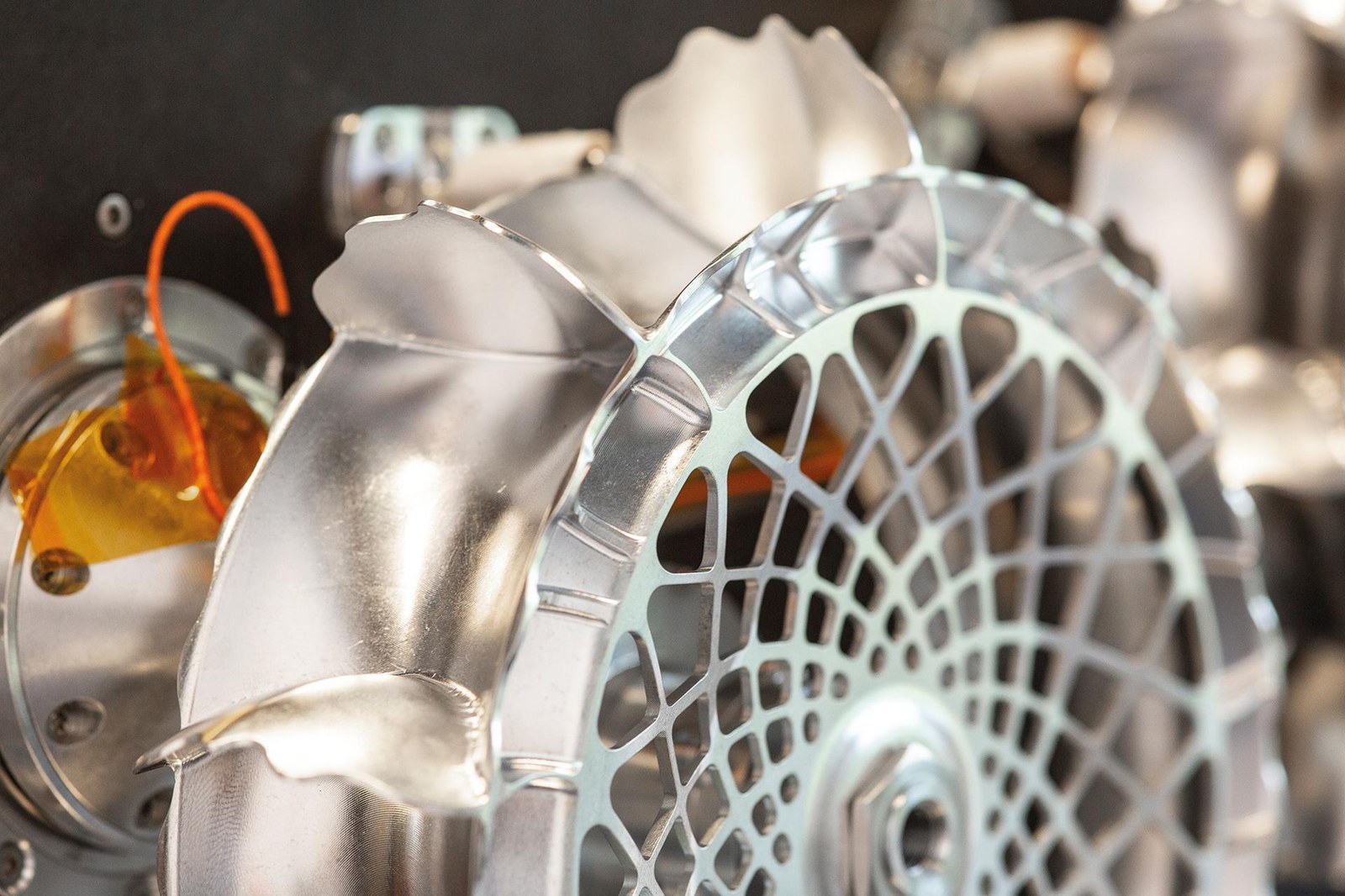
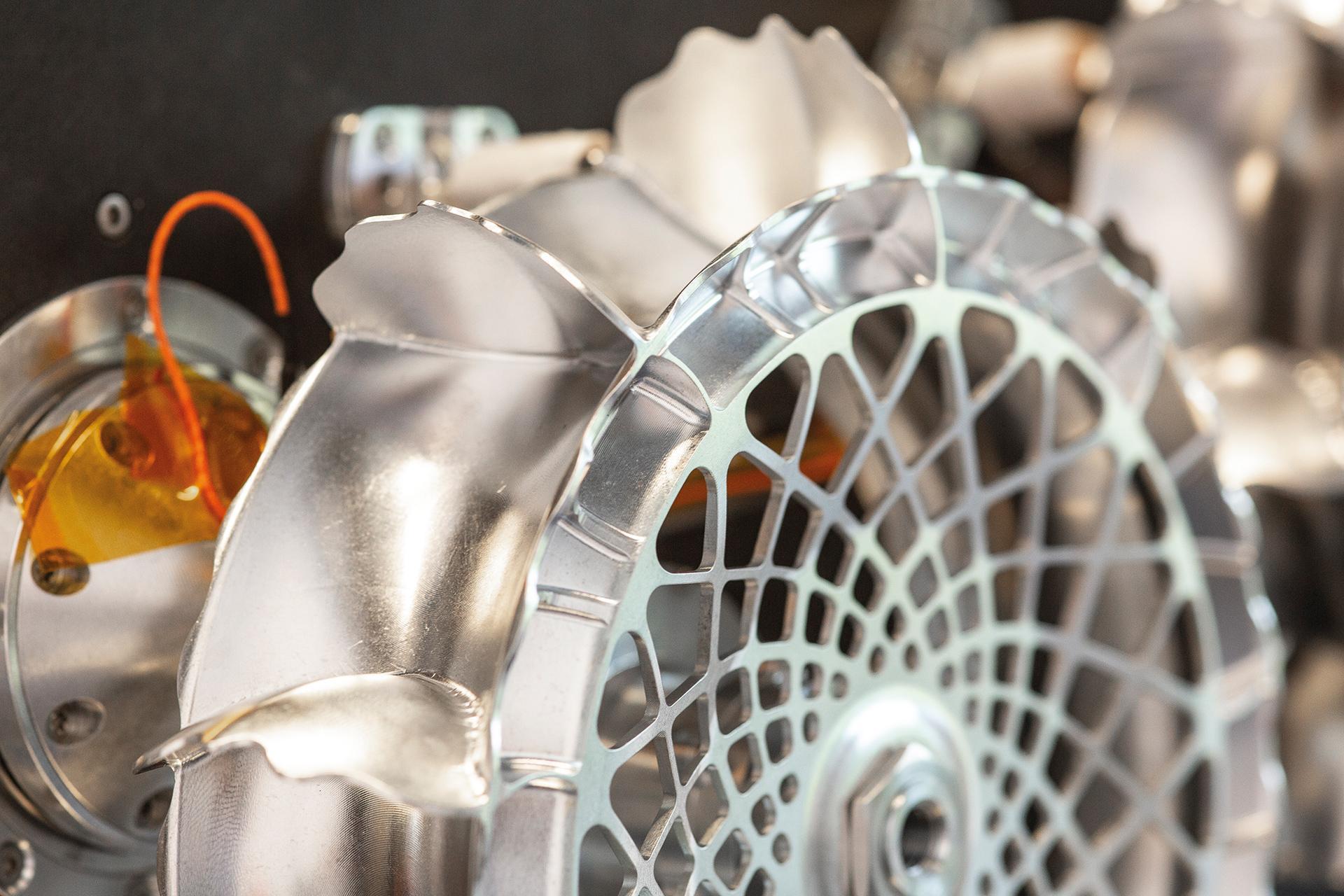
Neun Schaufeln an jedem Rad, auch „Grouser“ genannt, sorgen bei sandigem und lockerem Untergrund für den nötigen Vorschub, aber auch das Fahren auf einer harten Oberfläche ist damit möglich. Die nach innen gewölbte Lauffläche minimiert das Einsinken und ermöglicht gleichzeitig eine ausreichende „Grouserfläche“, um die Zugkraft zu maximieren. Das seitlich asymmetrische Profil der Lauffläche erleichtert den Point-Turn, also das Drehen auf der Stelle.
Im Vergleich zu bisherigen Rover-Rädern konnte beim MMX-Rad viel Gewicht eingespart werden – gerade einmal 190 Gramm bringt ein Rad auf die Waage. Mit einem Durchmesser von 214 Millimetern und einer Breite von 53 Millimetern lässt sich ein solches Gewicht nur durch dünne Wandstärken von teilweise unter einem Millimeter erzielen. Die Speichenstruktur wurde mit Hilfe der Topologieoptimierung erzeugt, einem computerbasierten Verfahren, das die bestmögliche Grundgestalt für Bauteile unter mechanischer Belastung berechnet. Die netzartige Struktur sorgt auch für die notwendige Absicherung in punkto Stabilität – sollte der Rover seitlich auf spitzem Gestein landen und ein Speichenelement brechen, könnte der Rover dennoch weiterfahren, und die Mission wäre nicht gefährdet. Um bei den dünnen Wandstärken die notwendige Festigkeit erreichen zu können, wurde eine hochfeste Aluminiumlegierung verwendet. Weitere Versteifungen in der Radstruktur dienen als Anschlagpunkte für einen „Hold Down and Release Mechanism“, welcher das Rad sowie das Bein in Position hält.
In zahlreichen virtuellen und realen Tests am vollautomatischen Radprüfstand TROLL (Terramechanik Robotics Locomotion Lab) musste das Rad beweisen, dass es seiner Aufgabe gewachsen ist. Im weiteren Verlauf konnten mit den Simulationen viele offene Fragen zur Fortbewegung geklärt werden, und der Rover konnte vorab für die geringe Gravitation virtuell getestet werden – eine Umgebungsbedingung, die sich auf der Erde ansonsten nicht nachstellen lässt.
MMX – Martian Moons eXploration
MMX ist eine Mission der japanischen Weltraumorganisation JAXA mit Beiträgen von NASA, ESA, der französischen Raumfahrtagentur CNES und dem Deutschen Zentrum für Luft- und Raumfahrt (DLR). CNES und DLR steuern zusammen einen 25 Kilogramm schweren Rover bei. Der deutsch-französische MMX-Rover wird unter gemeinsamer Leitung der beiden Partner entworfen und gebaut. Das DLR übernimmt dabei insbesondere die Entwicklung des Rover-Fahrwerks samt Carbonstruktur sowie des gesamten Aufricht- und Fortbewegungssystems. Zudem steuert das DLR das Verbindungs- und Separationssysten zur Muttersonde bei und stellt ein Raman-Spektrometer sowie ein Radiometer als wissenschaftliche Experimente. Diese werden die Oberflächenzusammensetzung und -beschaffenheit auf Phobos messen. Die CNES leistet wesentliche Beiträge mit Kamerasystemen zur räumlichen Orientierung und Erkundung auf der Oberfläche sowie zur Untersuchung der mechanischen Bodeneigenschaften. Darüber hinaus entwickelt die CNES das zentrale Service-Modul des Rovers inklusive des Onboard-Computers sowie des Energie- und Kommunikationssystems. Nach dem Start der MMX-Mission wird der Rover von Kontrollzentren der CNES in Toulouse (Frankreich) und des DLR in Köln betrieben.
Seitens des DLR sind unter der Leitung des Instituts für Robotik und Mechatronik zudem die Institute für Systemdynamik und Regelungstechnik, für Faserverbundleichtbau und Adaptronik, für Raumfahrtsysteme, für Optische Sensorsysteme, für Planetenforschung, für Softwaretechnologie sowie das Nutzerzentrum für Weltraumexperimente (MUSC) beteiligt.
Die Mission MMX steht in der Tradition einer bereits langjährigen erfolgreichen Kooperation der Partner JAXA, CNES und DLR. Sie knüpft an die Vorgängermission Hayabusa2 an, bei der die JAXA eine Raumsonde zum Asteroiden Ryugu schickte mit dem deutsch-französischen Lander MASCOT an Bord. Am 3. Oktober 2018 landete MASCOT auf Ryugu und sendete spektakuläre Bilder einer faszinierenden zerklüfteten Landschaft aus Geröll und Steinen. Hayabusa2 nahm Proben von Ryugu und brachte diese am 6. Dezember 2020 zurück zur Erde.