
Traffic monitoring with the TerraSAR-X/TanDEM-X satellite constellation
To determine vehicle speeds and locations, a database of the road network is required. There is no reliable way of dealing with vehicles moving on open land or on unmapped roads. Areas that contain many parallel streets are also problematic. At the DLR Microwaves and Radar Institute, a special traffic processor for the TerraSAR-X/TanDEM-X satellite constellation has been developed, which is not subject to the limitations mentioned above. There is no need for a road database or any other prior knowledge. Off-road vehicles and ships at sea can be detected clearly and with high accuracy.
The traffic processor combines the data recorded by TerraSAR-X and TanDEM-X at different times. To achieve the best performance, the distance between the two satellites is required to be 20 kilometres. The commissioning phase of TanDEM-X was ideal for demonstrating the performance capabilities of the traffic processor. During this phase, the two satellites were positioned precisely 20 kilometres apart, before eventually moving into close formation.
How does the radar differentiate between stationary and moving objects?
To radar, the main difference between moving and stationary objects is the different Doppler frequency (the change in frequency of the signal caused by the distance between the radar and the change in position of the observed object, which is proportional to its speed. This difference in Doppler frequency means that moving objects shift from their actual position when depicted in a radar image (see illustration to left).
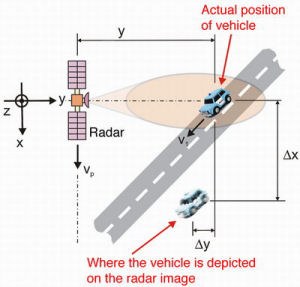

This means that vehicles might appear to be quite some distance from the road where they actual are: "It's in the ditch!" some might assume at first glance. But this 'ditch' could be several hundred metres away from the actual road, depending on the speed of the vehicle. So, it can be hard to determine the true position of vehicles and clearly assign them to the road that they are travelling on. This is where the traffic processor comes in. Its purpose is to detect the vehicles and their actual positions and speeds with high precision.
How did TerraSAR-X measure vehicle positions and speeds on its own?
If only one radar satellite is available, the traffic processor has to perform a 'trick'. It needs to know exactly where the roads are in the radar image. It can then determine the offset between the true and apparent positions of each vehicle and calculate the speed, which is proportional to the offset. As mentioned before, among other things, there are problems with areas that include densely populated zones with a number of parallel streets, which make it difficult to assign vehicles to the correct road. In the worst-case scenario, if TerraSAR-X evaluates just the interferometric phase between its two antenna halves, the results can be several hundred metres out. The main reasons for this are phase noise and interference from stationary objects.
On what principle does the new, more powerful TerraSAR-X / TanDEM-X traffic processor operate?

If the same area is imaged by TerraSAR-X and then by TanDEM-X shortly afterwards (or vice versa), the moving objects appear shifted from their true positions in both radar images. For example, in the illustration to the right, a vehicle or ship is depicted in different 'incorrect' positions in the two images, as it moved in the interval between the two satellite recordings and its true position changed. The displacement in the image depends on the speed of the target and how far apart the two satellites are.
The difference between the images can be measured with high precision and this means that the vehicle or ship’s actual position, its speed, direction and even its acceleration can be calculated accurately.
Preliminary results from the commissioning phase show that the speed estimation error was less than one kilometre per hour and the average position estimation error was about 20 metres. These figures are quite impressive; no other radar satellite system has ever achieved this accuracy, particularly without the use of a road database!
Obviously, we have to spend the next few weeks evaluating more recordings from the commissioning phase to statistically confirm the estimation accuracy, and we have to work on optimising the traffic processor. Only then will we be able to finalise the verification phase.
What exactly does the new traffic processor provide as output?
The traffic processor operates automatically and provides as its output what is known as a Keyhole Markup Language (KML) file. This file can be viewed in Google Earth. Illustration 3 shows preliminary observations of ships in the Strait of Gibraltar (of course, road traffic can be displayed in a similar way). The detected ships are depicted as coloured symbols in the image. The positions of the symbols represent the true positions of the ships. The user can click on a symbol to open a window showing all the relevant information about the ship (shown on the left of the illustration below). In this example, the window also includes Automatic Identification System (AIS) reference data, which are used to verify the performance of the traffic processor. There are other output formats available in addition to KML, which enable a more detailed, automated traffic assessment and data analysis process, by a Traffic Management Centre, for example.

Results of observing ships in the Strait of Gibraltar. The vessels are shown by coloured symbols (the positions of the symbols represent the true positions). The radar images of the ships (white) can be seen, displaced from the symbols by a distance of up to 550 metres.
The radar data taken from TerraSAR-X and TanDEM-X were pre-processed with the versatile TAXI processor (Experimental TanDEM-X Interferometric Processor) developed at the DLR Microwaves and Radar Institute. To verify the performance of the traffic processor, AIS data kindly provided by Stephan Brusch and Susanne Lehner of the DLR Remote Sensing Technology Institute was used.
Tags: