
Fortbewegung auf einem unbekannten Himmelskörper
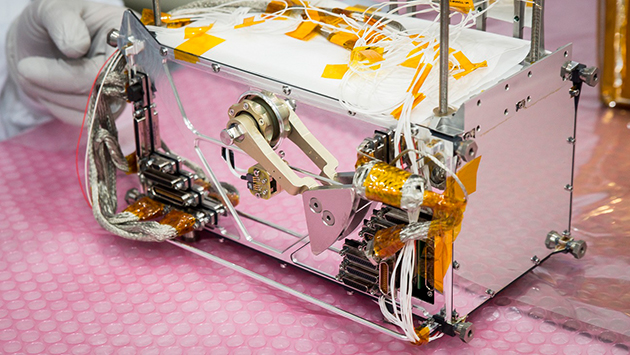

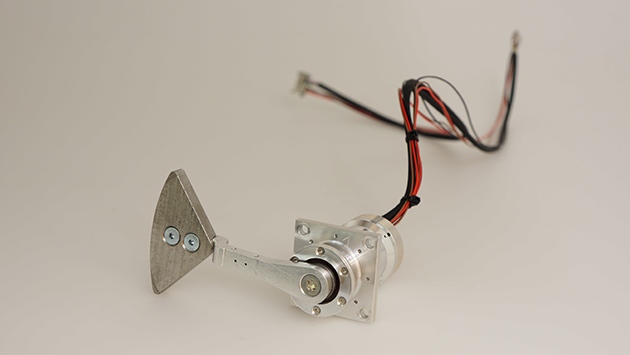
Die Fortbewegung auf Asteroiden und anderen kleinen Körpern ist schwierig, weil die Gravitation und damit auch die Reibung zwischen einem Lander und dem Boden sehr klein sind. Herkömmliche Fortbewegungstechniken mittels Räder oder Ketten basieren auf Traktion durch Reibung und sind daher für Asteroiden ungeeignet. Für MASCOT wurde ein alternativer Mobility-Mechanismus entwickelt, um Fortbewegung in einer solchen Umgebung zu ermöglichen: Innerhalb des Landers befindet sich ein Schwungarm, durch den eine exzentrisch angebrachte Masse beschleunigt und abgebremst wird. Durch die resultierenden Reaktionskräfte wiederum kann sich der Lander vom Boden abstoßen. Da die Gravitation sehr gering ist, können schon kleine Abstoßgeschwindigkeiten große Sprünge herbeiführen: Mit einer Anfangsgeschwindigkeit von 5 cm/s kann MASCOT bereits eine Distanz von 17 m erreichen. Die Fallbeschleunigung auf der Oberfläche von Ryugu beträgt nur 0.00015 m/s2 und ist damit 60.000 Mal kleiner als auf der Erde (9.81 m/s2).
Das Testen dieses Mechanismus auf der Erde gestaltet sich allerdings sehr schwierig: Die traditionellen Methoden zum Testen in Schwerelosigkeit können hier nicht sinnvoll genutzt werden. Bei Parabelflügen ist zwar die durchschnittliche Schwerkraft null, aber es treten hochfrequente Beschleunigungstörungen auf, welche die Testergebnisse signifikant verfälschen. Außerdem müsste die Beschleunigung während der Parabel nicht auf grob null sondern sehr genau auf einen sehr kleinen Betrag wie auf Ryugu eingestellt werden. Das lässt sich flugtechnisch kaum realisieren. Unter Einschränkungen kann man das Szenario aber mithilfe eines Lufttisches am Boden nachbilden: Hier wird das gleiche Prinzip wie beim Airhockey genutzt. Auf dem Tisch können sich luftgelagerte Körper in der Tischebene reibungsfrei bewegen und um die Vertikale rotieren. Durch ein leichtes Neigen des Tisches lässt sich auch eine leichte Gravitation aufbringen. Allerdings ist der Mobility-Mechanismus darauf ausgelegt, bei MASCOT Rotationen in alle drei Richtungen anzuregen: Die zu beschleunigende Masse ist exzentrisch angebracht, damit zusätzlich zu der rotierenden Zentrifugalkraft in der Ebene des Arms auch Drehmomente an den Kanten der MASCOT-Aufstandsfläche auftreten. Dadurch bewegt und dreht sich MASCOT bei jeder Armbewegung in drei Richtungen und verschiebt gleichzeitig seinen Schwerpunkt. Diese Dynamik macht auch irdische Tests schwer durchführbar, bei denen die Gewichtskraft mit einem Helium-Ballon statisch kompensiert würde.
Um die Bewegungen auf dem Asteroiden vorherzusagen, muss man daher auf Software-Modelle und Simulationen zurückgreifen. Es gibt viele verschiedene Modelle, um die Kontaktkräfte zwischen Körpern zu simulieren. Für die Mobility-Simulation wird zu jedem Zeitpunkt die Verschneidung der MASCOT-Box mit der Bodenoberfläche bestimmt und anhand der Tiefe und Geschwindigkeit der Überschneidung eine Kontaktkraft berechnet, die auf einem Feder-Dämpfer-Modell basiert. Allerdings ist es schwer, Parameter wie beispielsweise Steifigkeit oder Dämpfung des Bodens einzustellen, weil es keine Daten über die Beschaffenheit von Asteroiden wie Ryugu gibt. Leider hängt die genaue Bewegung in Mikrogravitation aber sehr stark von diesen Parametern ab, und die Mobility sollte sowohl bei blankem Fels als auch bei einer porösen Oberfläche aus Kieseln funktionieren.
Bei MASCOT wird das Problem wie folgt gelöst: Es werden verschiedene Armbewegungsprofile ermittelt, die für drei unterschiedliche Böden optimiert wurden. Während der Mission probiert der Autonomie-Manager beispielsweise bei einem Aufricht-Manöver diese nacheinander aus. Wenn ein Bewegungsprofil nicht zu einem richtigen Ergebnis geführt hat, wird die für einen anderen Boden passende Aktivität durchgeführt. Nach jedem Manöver wird über die Abstandssensoren auf allen Seiten des Landers geprüft, welche Seite Kontakt zum Boden hat. An den Seiten sind LEDs angebracht sowie Photodioden, die das von der Umgebung reflektierte Licht wieder einfangen. Je stärker das gemessene Signal, desto näher befindet sich der Sensor am Boden oder an einem Hindernis. Zusätzlich hat MASCOT Photozellen, die Sonneneinstrahlung erkennen und somit die Lagebestimmung weiter verbessern. Diese Daten können auch genutzt werden, um nach der Mission die Leistung der Mobility auszuwerten. Auch werden vor und nach jedem Manöver Bilder mit einer Kamera aufgenommen, die indirekt über die dazwischen erfolgte Bewegung der MASCOT-Box Aufschluss geben.

Die zielgerichtete Fortbewegung und Ausrichtung eines Landers auf einem kleinen Körper bleibt eine Herausforderung. Bei der Erforschung von völlig unbekannten Körpern, wie es der Asteroid Ryugu ist, ist es sehr schwer, einen gegen alle Umgebungsbedingungen robusten Mechanismus zu schaffen. Wie MASCOT sich tatsächlich auf der Asteroidenoberfläche bewegen wird – das wird sich im Detail zeigen, wenn er am 3. Oktober von der Raumsonde Hayabusa2 separiert wird, auf den Asteroiden fällt und dort mit seinen vier wissenschaftlichen Instrumenten an Bord für 16 Stunden autonom arbeiten wird.
Tags: