
Angeleitet aus dem All: Roboter-Experiment zwischen ISS und Oberpfaffenhofen


Wenn es um die Fernsteuerung von Robotertechnologie für Raumfahrtanwendungen geht, ist das Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (DLR) schon lange Vorreiter. Bereits 1993 wurde weltweit erstmalig während des ROTEX-Experiments gezeigt, wie ein Roboter einen Gegenstand im Weltall einfangen kann - und zwar ferngesteuert. Zuletzt hat Kosmonaut Sergei Volkov die daraus entstehende Technologie genutzt, um im Dezember 2015 einen Roboter auf der Erde von der Internationalen Raumstation (ISS) aus zu bedienen. Ein feinfühliger Joystick hat es dem Kosmonauten dabei sogar ermöglicht, mit dem Institutsdirektor Prof. Albu-Schäffer auf den Erfolg der damaligen Kontur-2-Mission anzustoßen.
Jetzt, zwei Jahre später, soll das Experiment "SUPVIS Justin" an diesen Erfolg anknüpfen. Am Freitag, den 25. August 2017, soll zum ersten Mal ein Roboter als intelligenter Assistent eines Astronauten eingesetzt werden. ESA-Astronaut Paolo Nespoli, der zurzeit auf der ISS ist, soll mit Hilfe des humanoiden Roboters Rollin' Justin den Ernstfall einer zukünftigen Marsmission üben. Der gebürtige Italiener soll von dem Außenposten im All aus Roboter Justin in Oberpfaffenhofen steuern. Anders als bei der Kontur-2-Mission soll diesmal aber keine direkte Fernsteuerung eingesetzt, sondern die künstliche Intelligenz des Roboters genutzt werden, um komplexe Aufgaben teilautonom auszuführen. Das bedeutet, dass Nespoli den Roboter nicht dauerhaft aktiv steuert, ihn aber bei der Lösung der Aufgabe anleitet.
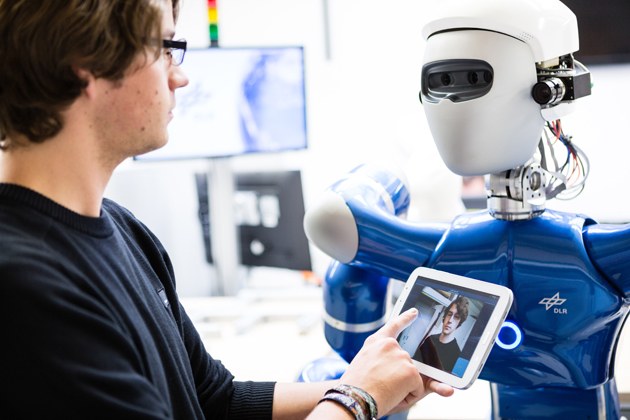
Dieses Szenario ist stellvertretend für zukünftige Explorationsszenarien, in denen ganze Flotten von Robotern die Landung bemannter Marsmissionen vorbereiten sollen. Dabei hat der Astronaut lediglich ein Tablet-PC, mit dem er den Roboter wie einen Kollegen instruieren kann. Der Roboter selbst ist mit den notwendigen Fähigkeiten ausgestattet, um komplexe Befehle zu interpretieren und umzusetzen. Auf das Kommando "Inspiziere das Solarpanel" reagiert der Roboter beispielsweise mit einer geschickten Abfolge von Aktionen und präsentiert dem Astronauten anschließend die Informationen der Anlage - vollkommen selbstständig. Paolo Nespoli kann so die Solarfarm am Institut für Robotik und Mechatronik warten, ohne dabei selbst vor Ort zu sein. Justin ist damit der erste Roboter, der dank künstlicher Intelligenz eine wahre Stütze für Astronauten darstellt.
Das SUPVIS Justin-Experiment ist Teil der Multi-purpose End To End Robotic Operations Network (METERON) Mission und wird noch bis zum Jahr 2018 fortgeführt. Dann soll auch der deutsche Astronaut Alexander Gerst zusammen mit Rollin' Justin für zukünftige Marsmissionen trainieren.
Tags: