
Rendezvous mithilfe von GPS und optischer Navigation
Erwähnenswert ist die Tatsache, dass während der gesamten Annäherung keine GPS-Daten von Tango verwendet wurden. Die Relativ-Navigation basierte ausschließlich auf Winkelmessungen, die aus den Bildern, aufgenommen von Mango, abgeleitet wurden. Der erfolgreiche Abschluss von ARGON hat gezeigt, dass Techniken zu Guidance, Navigation & Control basierend auf optischer Navigation durch das DLR/GSOC nun qualifiziert sind und für eine Unterstützung von wichtigen On-Orbit Servicing Missionen zur Verfügung stehen.
Es konnte in der Zeit von 23. bis 27. April 2012 das ARGON Experiment (Advanced Rendezvous demonstration using GPS and Optical Navigation) erfolgreich durchgeführt werden. Da die PRISMA Formation im August 2011 an das schwedische Kontrollzentrum von OHB-SE zurückgegeben wurde, erfolgten der Missionsbetrieb und die Experimentüberwachung von Solna aus. Das deutsche Experimentteam bestand aus fünf Mitarbeitern der Abteilung für Raumflugtechnologie des DLR/GSOC.
Das Ziel von ARGON war die Demonstration eines Rendezvous mit einem nicht kooperativen passiven Ziel, das in einem möglichen On-Orbit Servicing Szenario die Rolle des Klienten übernahm. Als Folge davon agierte das Experimentteam ohne Informationen vom Zielsatelliten TANGO, es gab also keine Kenntnis von seiner Umlaufbahn bzw. seinen GPS-Daten. Um möglichst realistische Bedingungen zu schaffen, wurde TANGO zuvor noch in leichte Drehungen versetzt, ähnlich einem außer Kontrolle geratenen Satelliten. Entsprechend dem On-Orbit Szenario spielte MANGO die Rolle des Service-Satelliten. Seine GPS-Daten wurden für die hochgenaue Bahnbestimmung (Precise Orbit Determination POD) verwendet. Aber woher wusste man, wo TANGO war? Nun. Das war hier die Neuerung. Die Formationsparameter, also die Daten, die die relative Position von MANGO und TANGO beschreiben, wurden basierend auf reinen Winkelmessungen berechnet, die aus Bilddaten gewonnen werden konnten. Zu diesem Zweck war es notwendig, TANGO im Sichtbereich von MANGOs VBS Kamera (Sternkamera mit zusätzlicher Optik) zu halten. Dies wurde gewährleistet durch eine Kette von Aktionen, die vom Experimentteam als Teil des Regelkreises (ground-in-the-loop) durchgeführt wurden:
- Bildverarbeitung,
- Relativnavigation nur mit Winkeldaten,
- Strategie für die Formationshaltung und
- die entsprechende Manöverplanung
Zu Beginn von ARGON war die Formation von MANGO und TANGO dem Experimentteam nicht bekannt. Basierend auf verfügbaren Two-Line Elementen (TLEs) von TANGO und GPS-Daten von MANGO wurden grobe Formationsparameter berechnet und daraus eine grobe Entfernung in Flugrichtung (along-track) von 30km in erster Näherung geschätzt. Parallel dazu wurde das VBS System aktiviert, um regelmäßige Bildaufnahme von TANGO zu machen. Ein erstes kleines Manöver wurde eingeleitet, um zum einen eine Drift zum Zielsatelliten zu erreichen und zum anderen die Resultate der Relativ-Navigation zu verbessern. Während der dazwischen liegenden Bodenstationskontakte wurden die Bilddaten zum Boden geschickt und dort prozessiert. Basierend auf den daraus gewonnenen Winkeldaten wurde eine erste Relativnavigation berechnet. Dieses aktualisierte Wissen über die Formation wurde dann wieder bei der Berechnung der nächsten Manöverplanung berücksichtigt, und so weiter. Entsprechend dieser Strategie wurden zweimal am Tag Manöver durchgeführt, um die Formation in der Zielplanung zu halten. Das Hauptziel war, MANGO in einen Haltepunkt 3km in Flugrichtung von TANGO entfernt in einen sicheren Relativorbit zu bringen. Bild 1 zeigt die überlappenden Aufnahmen innerhalb eines Orbits während ARGON. Die Zeit zwischen 2 Aufnahmen beträgt hier etwa 10 Minuten. Der nahezu kreisförmige Relativ-Orbit von MANGO zu TANGO ist gut zu erkennen.
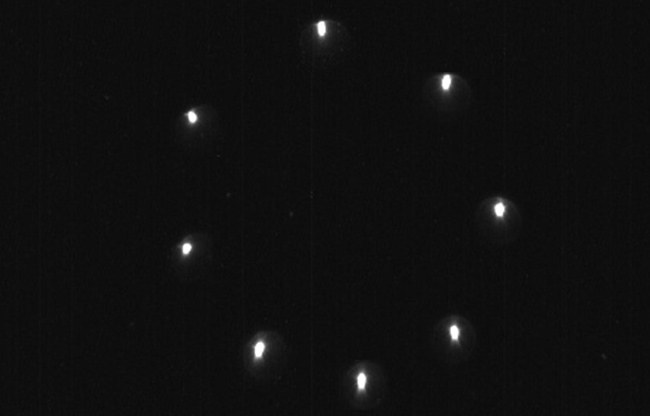

Bild 1: Überlappende Bilder von TANGO während eines Orbits, aufgenommen alle 10 Minuten
Aus Sicherheitsgründen haben die schwedischen Kollegen die GPS-Daten von TANGO für die Überwachung der Formation verwendet, um eine sichere Annäherung zu gewährleisten, doch sie haben diese Information zu keiner Zeit an das Experimentteam weitergegeben. Nur im Fall eines hohen Kollisionsrisikos hätten sie in das Experiment eingegriffen und es abgebrochen, doch das war nicht notwendig.
Nach Abschluss von ARGON wurden die aufgezeichneten GPS-Daten prozessiert, womit die relativ-Geometrie während des gesamten Experiments auch für das Experimentteam verfügbar war. Die so ermittelte Entwicklung der Formation während ARGON ist in Bild 2 dargestellt. Der Vergleich mit der optischen Relativ-Navigation zeigt eine außerordentliche Genauigkeit mit Fehlern unter 5-10m während des gesamten Experiments in allen Relativ-Bahnelementen (ohne Abstand in Flugrichtung, along-Track).
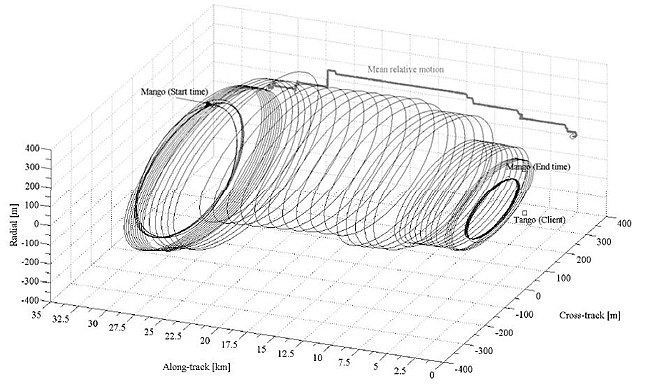
Bild 2. Tatsächliche Relativposition von MANGO, dargestellt in der auf TANGO ausgerichteten Bahnebene, berechnet mit GPS POD
Weitere Informationen zum Experiment allgemein, zur Entwicklung des Flugdynamiksystems und der erreichten Ergebnisse findet man in [1] und [2]. Die mit ARGONerzielten Erfahrungen sind sehr wertvoll für zukünftige Missionen, wie DEOS, in denen On-Orbit Servicing weiter entwickelt und realisiert wird. Die auf optischer Navigation basierenden Techniken für Guidance, Navigation & Control konnten demonstriert und qualifiziert werden und stehen nun für eine Unterstützung von wichtigen On-Orbit Servicing Missionen zur Verfügung.
[1] D'Amico, S. et al.: "Non-Cooperative Rendezvous using Angles-only Optical Navigation: System Design and Flight Results", Journal of Guidance, Control and Dynamics (JGCD), 2012.
[2] D'Amico, S. et al.: "Flight Demonstration of Non-Cooperative Rendezvous using Optical Navigation", ISSFD Conference Paper, 2012.
Tags: