
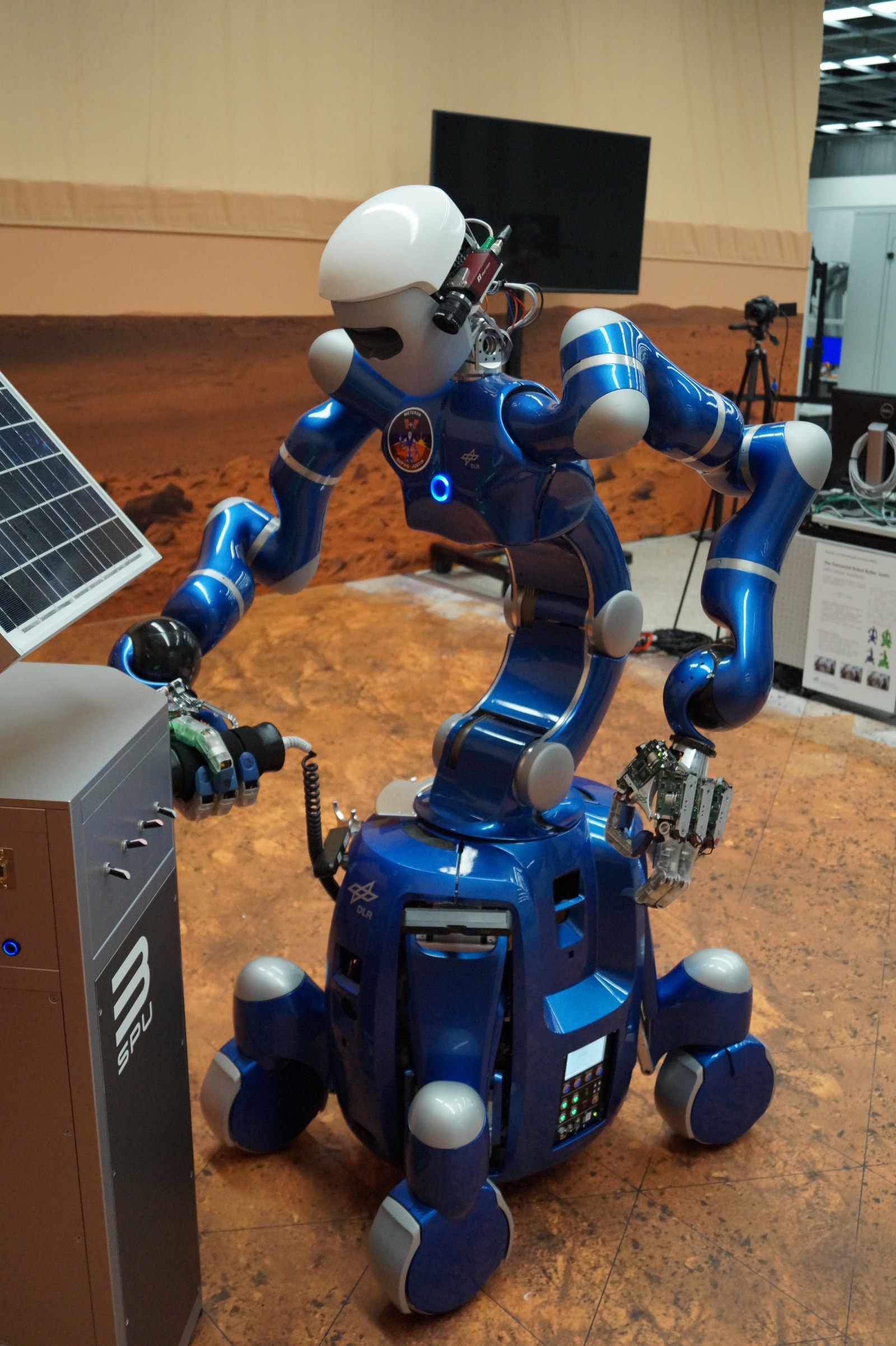
Rollin' Justin


Der humanoide Roboter Rollin Justin
Credit:
Technische Daten
Größe: | erwachsener Mensch (1,91m) |
Gewicht: | ca. 200kg |
Freiheitsgrade: | 51 (Plattform: 8, Arme: 2 × 7, Hände: 2 × 12, Hals: 2, Torso: 3) |
Nominale Nutzlast: | 20kg |
Energieversorgung: | Batterie mit > 60 min Betriebsdauer |
Geschwindigkeit: | 2 m/s bzw. 7,2 km/h |
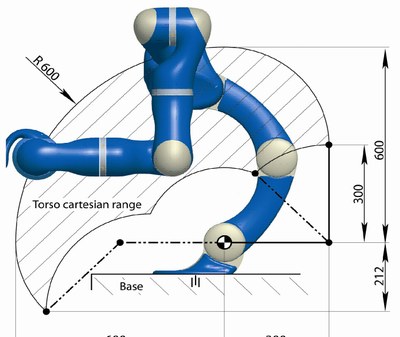
Arbeitsraum: | vom Boden bis zu einer Höhe von 2,7m |
Besonderheiten: |
|




{kind=link}
{kind=link}
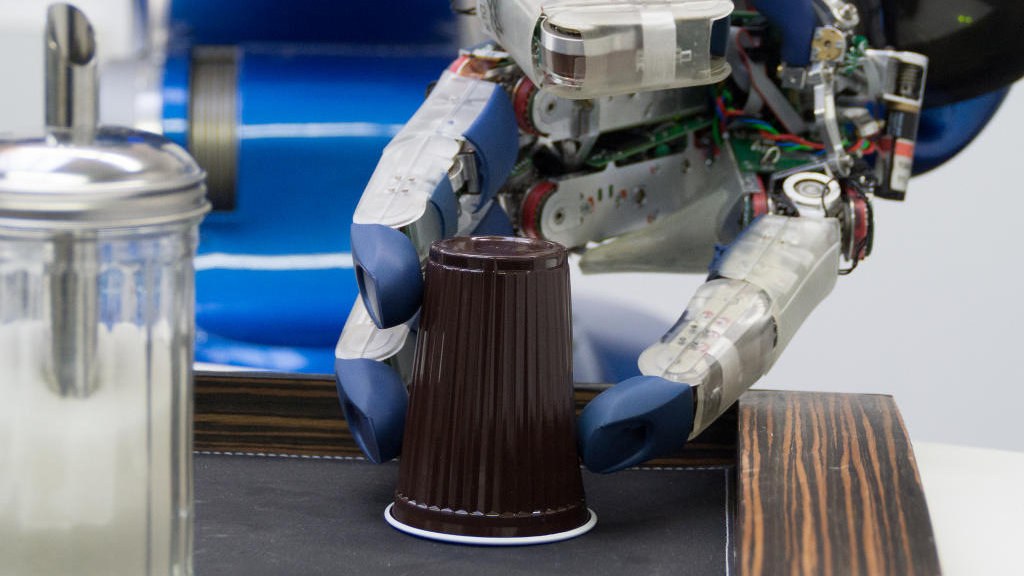
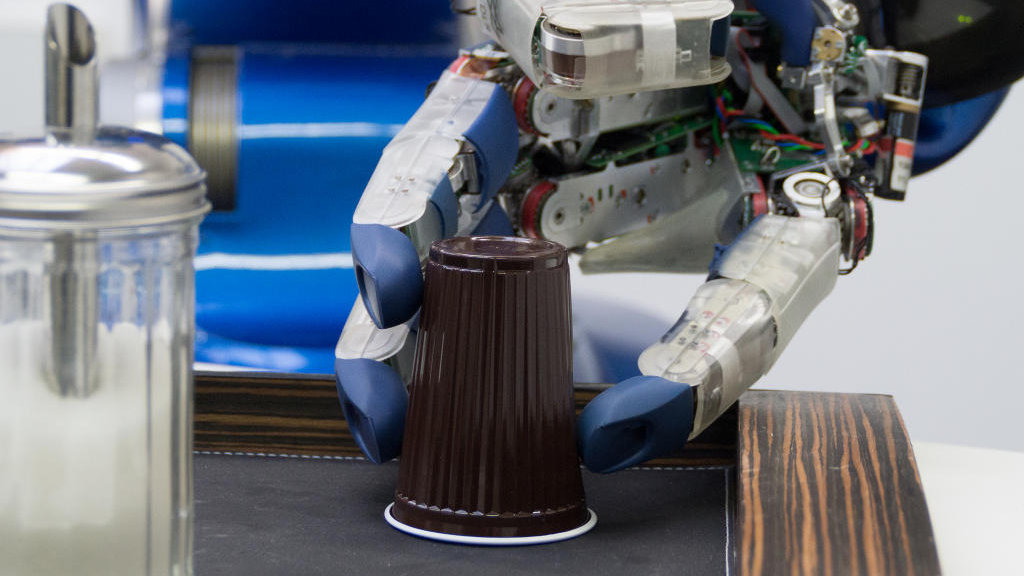
Feinfühlige Objektmanipulation
Durch die Drehmomentsensorik in den Fingergelenken ist Rollin' Justin in der Lage Aufgaben zu meistern, die ein hohes Maß an Feinfühligkeit verlangen. Ein Beispiel ist das Greifen eines Plastikbechers ohne ihn zu zerdrücken.
{kind=link}