Asteroidenlander MASCOT an Bord der Raumsonde Hayabusa2
Eine 3.200 Millionen Kilometer weite Reise liegt hinter der japanischen Raumsonde Hayabusa2 mit dem deutsch-französischen Lander MASCOT (Mobile Asteroid Surface Scout) an Bord.
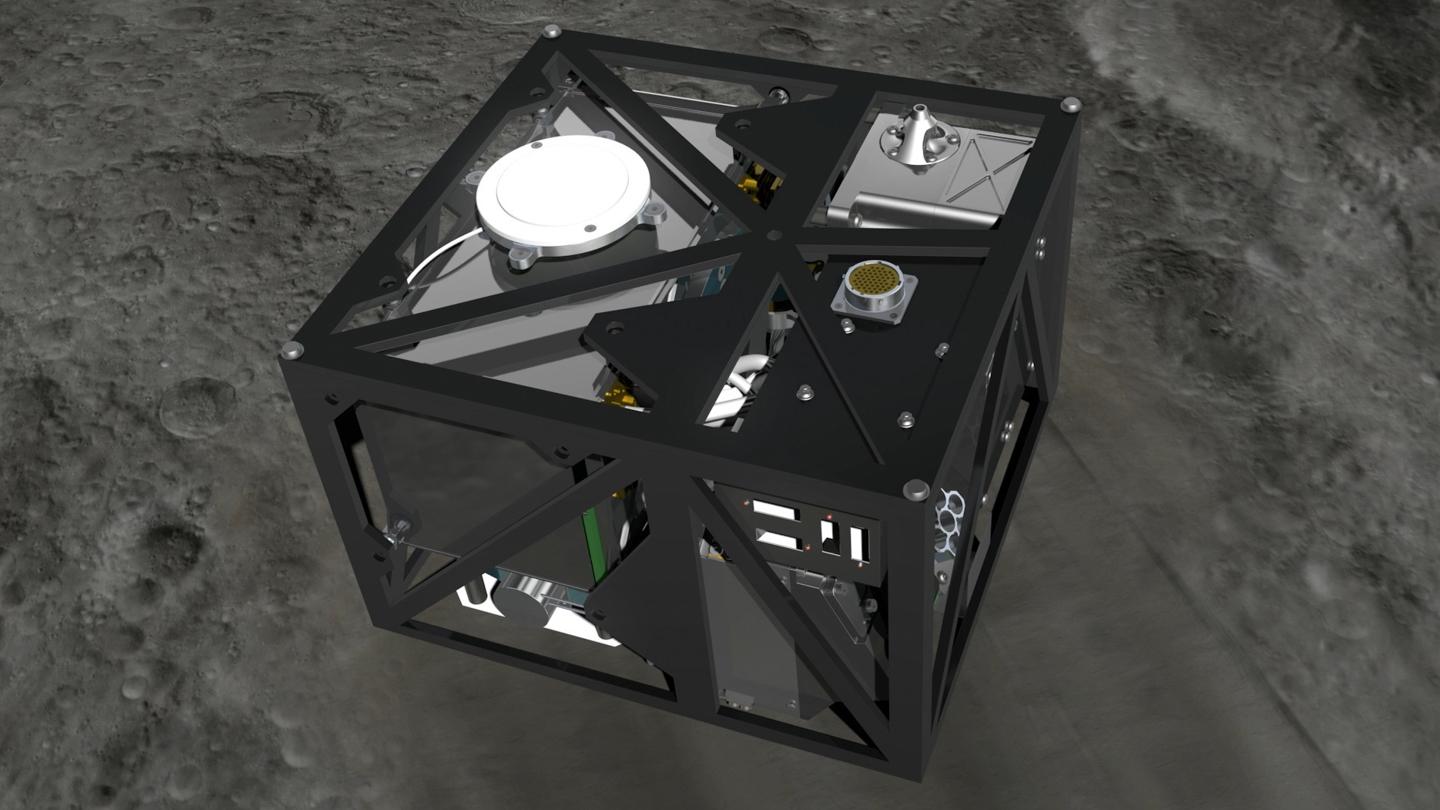
Asteroidenlander MASCOT (Mobile Asteroid Surface Scout)
MASCOT (Mobile Asteroid Surface Scout) ist ein hochintegrierter Asteroidenlander, federführend entwickelt von DLR-Wissenschaftlern in Kooperation mit der französischen Raumfahrtagentur CNES und der japanischen Raumfahrtbehörde JAXA.
Das Infrarot-Spektralmikroskop MicrOmega an Bord von MASCOT, ein Instrument des Institut d‘Astrophysique Spatiale (Paris), ermittelt die mineralogische Zusammensetzung des Regoliths von Ryugu.
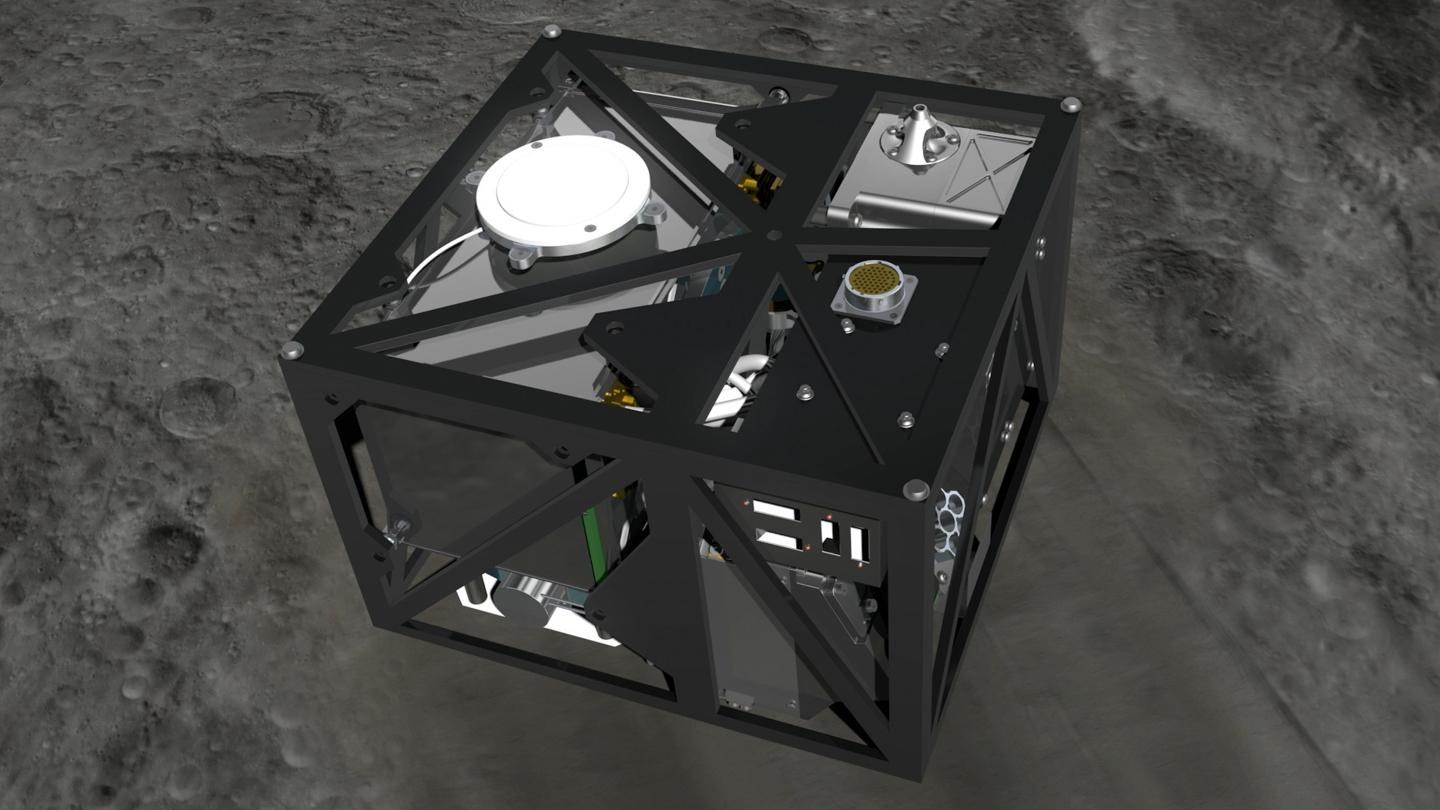
MASCOT (Mobile Asteroid Surface Scout) ist ein mobiles quaderförmiges Landegerät mit Abmessungen von 30 mal 30 mal 20 Zentimetern und einer Gesamtmasse von circa zehn Kilogramm. Er beherbergt vier wissenschaftliche Instrumente, die die Oberfläche des Asteroiden Ryugu detailliert untersuchen sollen.
Seine Struktur selbst ist mit 450 Gramm extrem leicht und zugleich hochsteif. Dies wird durch die Verwendung spezieller, nur 0,125 Millimeter dicker CFK-Schichten ermöglicht, die mit einem Schaumkern beziehungsweise als Laminat zu einer materialgerechten Fachwerkstruktur kombiniert sind.
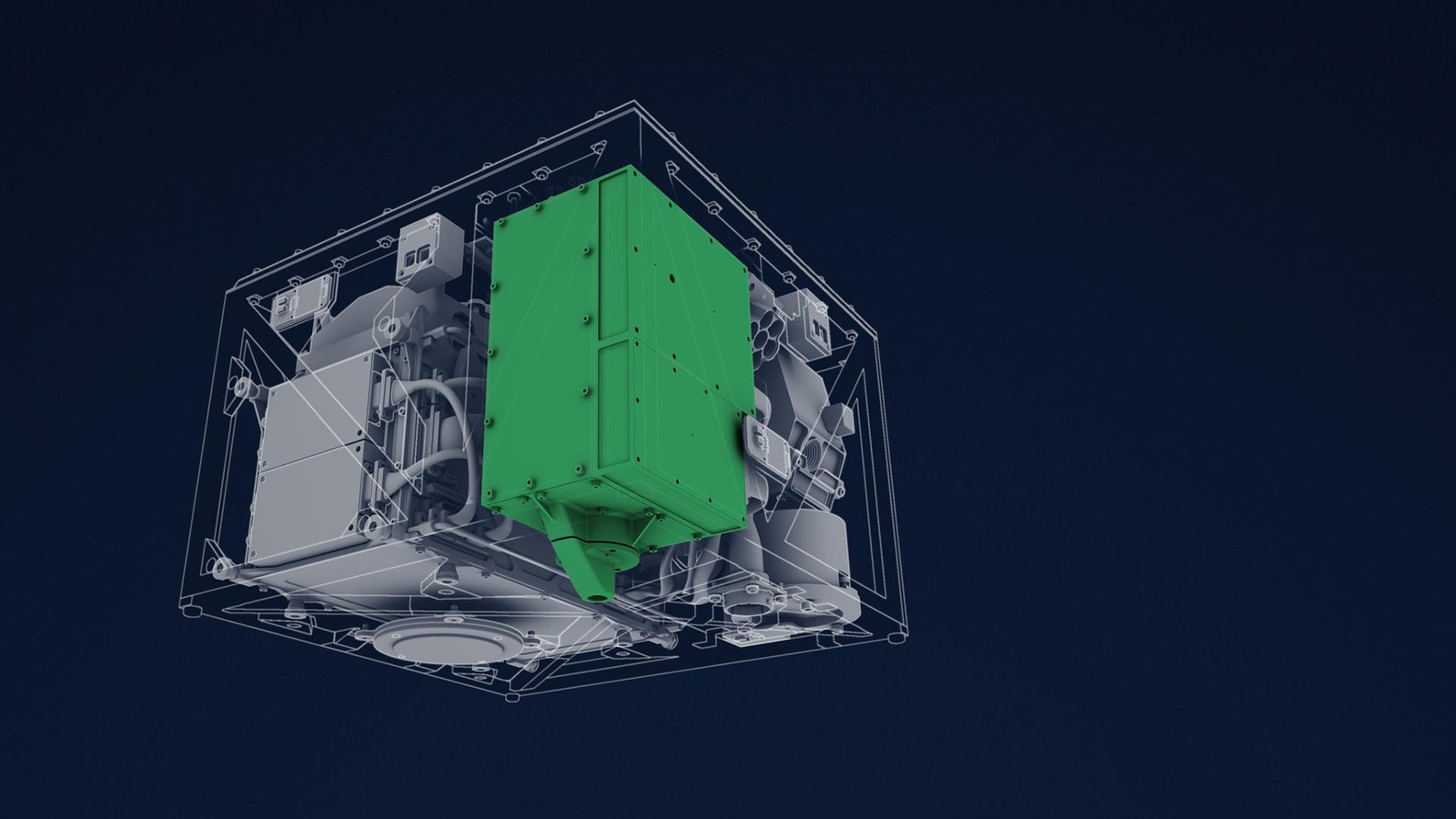
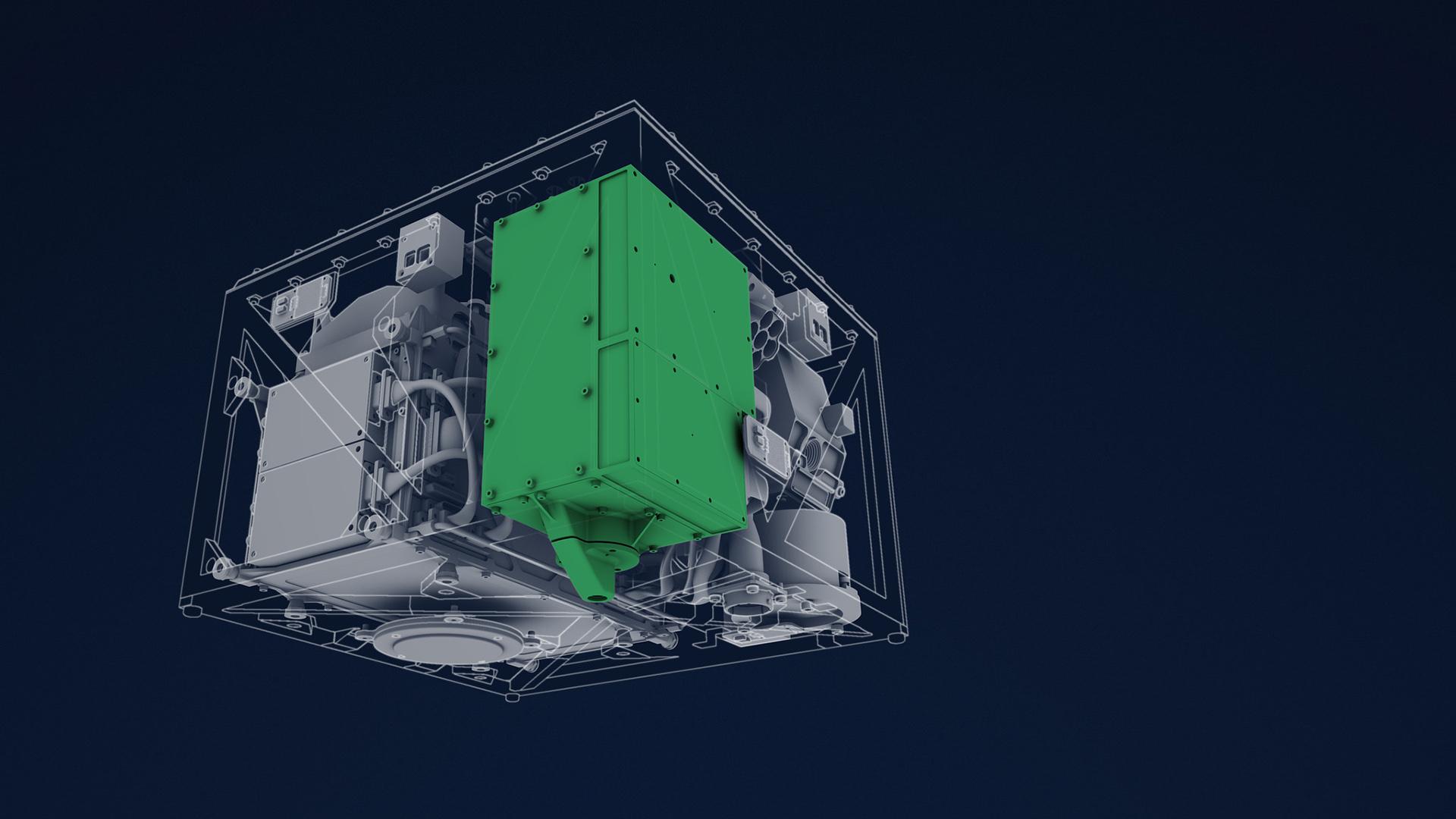
MASCOT beinhaltet zudem einen Mechanismus, der eine Fortbewegung auf der Asteroidenoberfläche ermöglicht. Dabei wird ein Schwungarm aus Wolfram durch einen Motor beschleunigt und abgebremst, wodurch ein Ruck auf das Gesamtsystem ausgeübt wird, sodass MASCOT sich durch „Springen“ fortbewegen und in die zur Durchführung der Experimente erforderliche Lage bringen kann. Die Batterie von MASCOT hat eine Kapazität von 200 Wattstunden, was für bis zu 16 Stunden Betriebszeit ausreicht. Tatsächlich war MASCOT über 17 Stunden in Betrieb und sammelte Daten von der Asteroidenoberfläche. Während dieser Zeit durchlief Ryugu zweivollständige Tag-und-Nacht-Zyklen.
Landen und „Springen“ auf einem Asteroiden
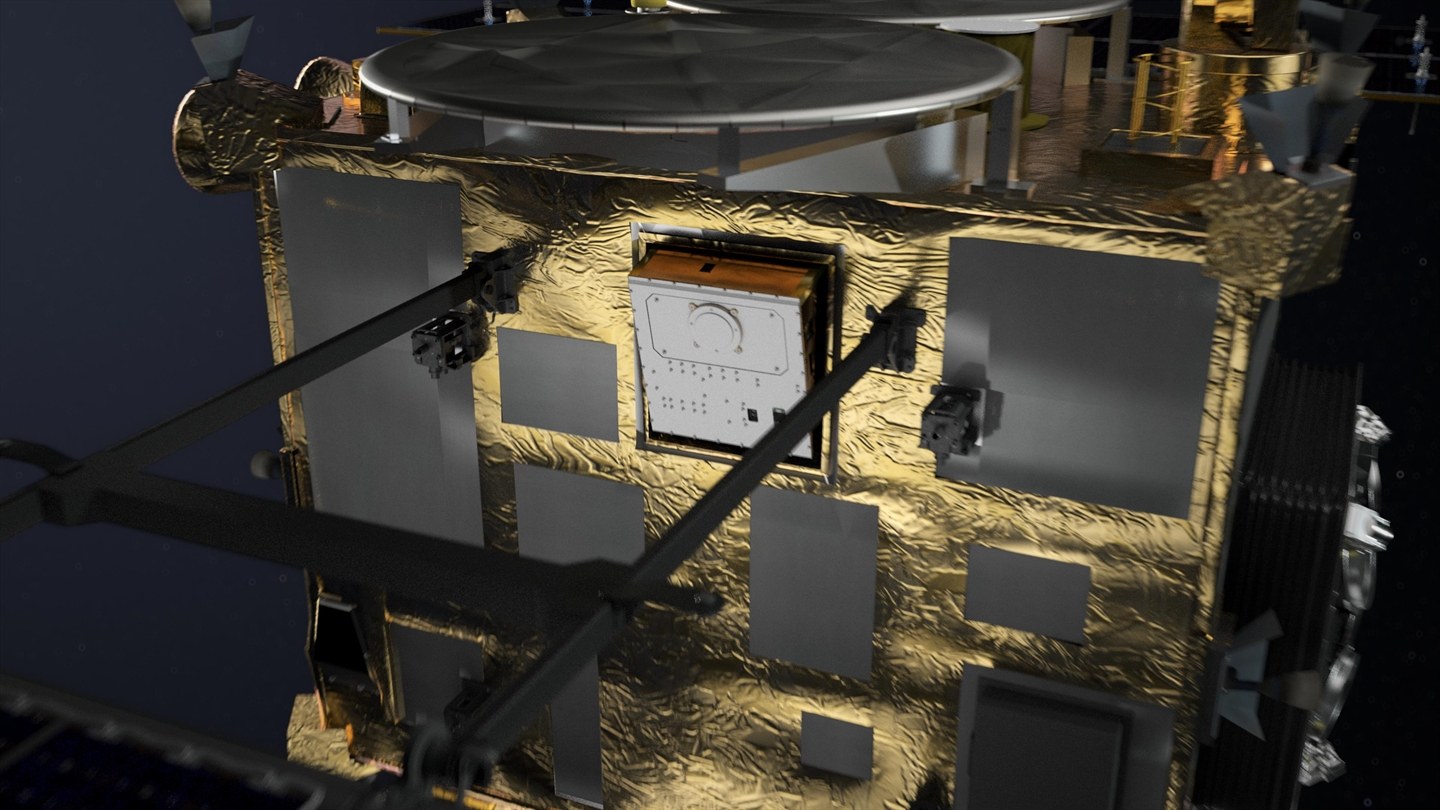
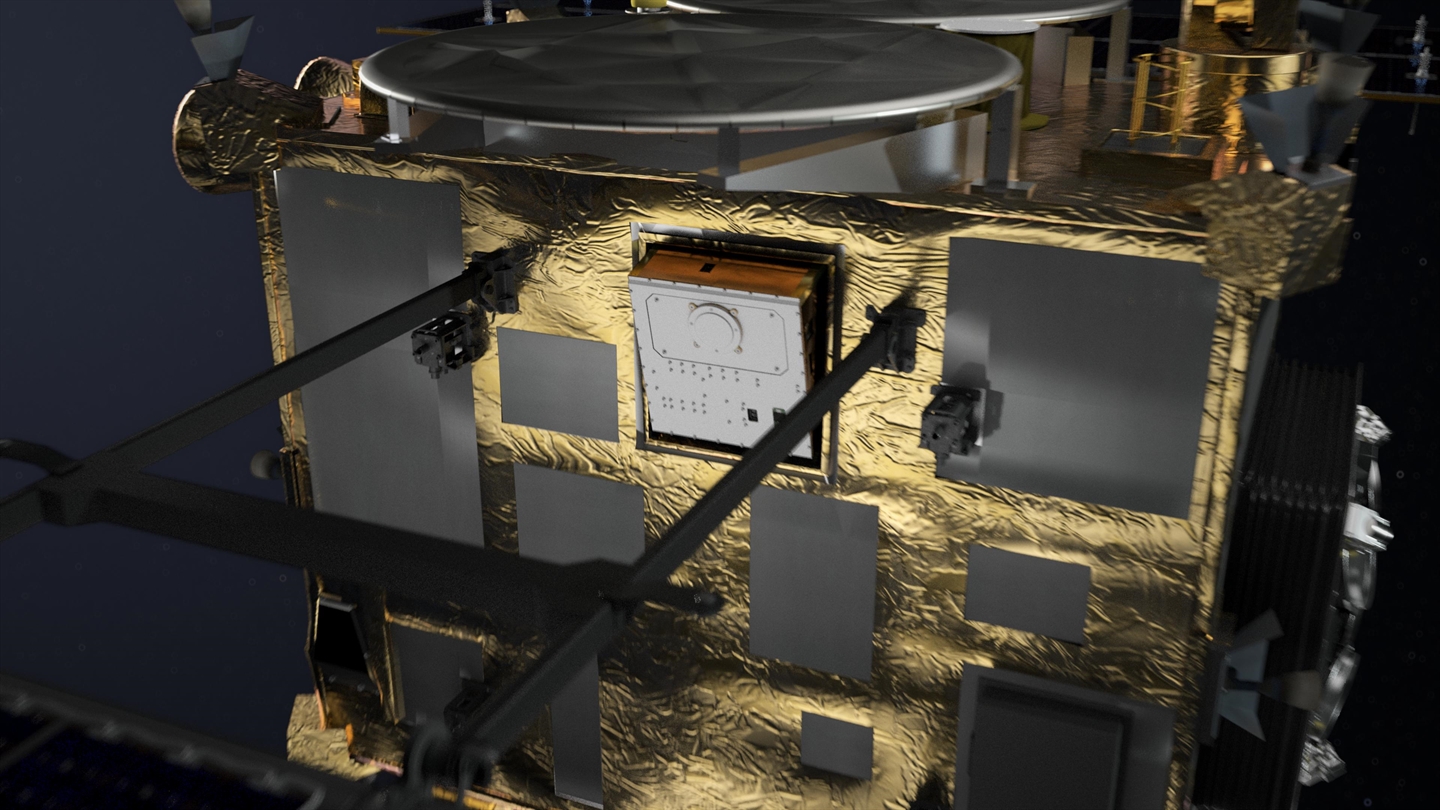
Da die Anziehungskraft des Asteroiden nicht ausreichte, um den MASCOT-Lander aus der Hayabusa2-Sonde „herauszuziehen“, wurde er mittels eines Federmechanismus hinter einer Abstoßplatte aus seiner Halterung herausgeschoben. Nach der Abtrennung von Hayabusa2 fiel MASCOT aus circa 51 Metern Höhe mit der Geschwindigkeit eines Papierblatts in Richtung des Asteroiden. Nach etwa sechs Minuten hatte MASCOT einen ersten Bodenkontakt mit Ryugu. MASCOT machte dann aber wegen der niedrigen Anziehungskraft des Asteroiden – sie beträgt nur ein Sechzigtausendstel des Werts auf der Erde – mehrere Sprünge über die Oberfläche. Das festgelegte Landegebiet MA9 (= „Alice’s Wunderland“) wurde genau getroffen und befindet sich etwa bei 300 Grad östlicher Länge und 30 Grad südlicher Breite.
Nach weiteren 31 Minuten und mehreren Bodenkontakten hatte MASCOT seine erste Ruheposition erreicht. Auf dem Asteroiden herrscht an der Landestelle Tag und die Oberflächen-Messungen begannen. Im DLR-Kontrollzentrum in Köln wurde festgestellt, dass MASCOT auf dem Rücken liegt und so seine geplanten Experimente nicht durchführen konnte. Denn für deren Ausführung war eine „aufrechte“ Position des Landers erforderlich. Von der Erde wurde außerplanmäßig ein Kommando an Hayabusa2 und von dort zu MASCOT gesendet, den Schwungarm zu aktivieren, um den Lander in seine für die Experimente vorgesehene Position zu drehen. Das Manöver war erfolgreich und MASCOT führte planmäßig und automatisch seine vier Experimente durch. Der Lander führte einen „Mini-Move“ aus, um die Lage der Sensoren der Experimente zu optimieren. Weitere wissenschaftliche Untersuchungen erfolgten. MASCOT machte noch einen weiteren Sprung und begab sich in die „End of Life“-Phase. Weitere wissenschaftliche Untersuchungen konnten durchgeführt werden, bevor nach insgesamt 17 Stunden und 7 Minuten der Kontakt mit MASCOT durch den Eintritt eines Funkschattens und die bevorstehende Nacht abbrach.
Die wissenschaftliche Nutzlast von MASCOT
Die Kamera MASCAM des DLR-Instituts für Planetenforschung nahm während des Abstiegs zu Ryugu 20 Bilder auf. Nach der Landung fotografierte sie die Umgebung der Landestelle bis zum Horizont in hoher Auflösung und führte auf der Asteroidenoberfläche geologische und physikalische Messungen der Umgebung und des Untergrunds durch. Das Radiometer MARA des DLR-Instituts für Planetenforschung diente zur Bestimmung der Oberflächentemperatur sowie der thermischen Eigenschaften des Regoliths. Das Infrarot-Spektralmikroskop MicrOmega, ein Instrument des Institut d‘Astrophysique Spatiale (Paris), ermittelte die mineralogische Zusammensetzung des Regoliths. Das Magnetometer MAG, eine Entwicklung des Instituts für Geophysik und extraterrestrische Physik der Technischen Universität Braunschweig, vermaß das Magnetfeldes des Asteroiden.
Die Daten von MASCOT wurden zu Hayabusa2 übertragen. Dabei befand sich die Sonde in einer Beobachterposition drei Kilometer über dem Asteroiden. Von dort wurden alle Messungen und Betriebsdaten von MASCOT zur Erde übermittelt.
Die Aktivitäten von der Abtrennung bis zum Ende der MASCOT-Betriebsdauer wurden aus dem JAXA-Kontrollzentrum in Sagamihara direkt zum DLR-Nutzerzentrum für Weltraumexperimente (MUSC) in Köln weitergeleitet. Die ersten Ergebnisse aus den Experimenten werden der japanischen Missionsleitung und dem MUSC auch Anhaltspunkte für die Auswahl der Landepunkte zur später erfolgenden Probennahme geben.
Beteiligung der DLR-Institute am MASCOT-Lander
Das DLR-Institut für Raumfahrtsysteme in Bremen entwickelte federführend zusammen mit CNES den Lander und testete ihn. Das DLR-Institut für Faserverbundleichtbau und Adaptronik in Braunschweig war für die stabile Struktur des Landers zuständig. Das DLR Robotik und Mechatronik Zentrum in Oberpfaffenhofen entwickelte den Schwungarm, der MASCOT auf dem Asteroiden hüpfen lässt. Das DLR-Institut für Planetenforschung in Berlin steuerte die Kamera MASCAM und das Radiometer MARA bei. Überwacht und betrieben wird der Asteroidenlander aus dem MASCOT-Kontrollzentrum im Nutzerzentrum für Weltraumexperimente (MUSC) am DLR-Standort Köln.

{kind=link}
{kind=link}
{kind=link}